利用GNSS星间链路的航天器定轨方法研究
2015-02-27孟轶男樊士伟杨强文宋小勇
孟轶男樊士伟杨强文宋小勇
(1北京跟踪与通信技术研究所,北京 100094)(2西安测绘研究所,西安 710054)
利用GNSS星间链路的航天器定轨方法研究
孟轶男1樊士伟1杨强文1宋小勇2
(1北京跟踪与通信技术研究所,北京 100094)(2西安测绘研究所,西安 710054)
针对利用全球卫星导航系统(GNSS)星间链路实现用户航天器定轨时存在的链路资源有限问题,构建基于GNSS星间链路的用户航天器定轨模型,设计了应用流程,重点研究了星间链路测量频度、可建立链路数量等链路规划模式对用户航天器定轨结果的影响,并分别针对高轨用户航天器和中低轨用户航天器进行仿真分析和试验验证。结果表明:用户航天器与GNSS卫星建立星间链路的频度越高、数目越多,动力学法轨道改进的效果越好;对高轨用户航天器采用广播星历,即使每6 h只有1条观测链路,也可以获得40 m以内的定轨精度;对低轨用户航天器采用精密星历,当每次观测链路增加到5条时,基本可以获得1 m以内的定轨精度。
全球卫星导航系统;星间链路;定轨;链路规划;应用模式
1 引言
全球卫星导航系统(GNSS)星间链路是指导航卫星之间直接建立的用于双向测距及数据传输的无线电链路。为了实现GNSS自主运行,提升系统服务性能,满足完好性指标,在GPS、GLONASS、Galileo及我国的“北斗”等导航系统中,建有星间链路系统或在持续关注星间链路系统的设计,不过,目前大部分星间链路研究主要侧重于导航系统内部的应用[1-4]。GNSS星间链路的波束范围可覆盖地面、近地空间和深空[5-6],兼具高精度测量和星间通信功能,可为导航系统之外的用户航天器定轨提供一种新的有效手段[7]。传统导航卫星播发L频段导航信号,其有效波束覆盖范围仅针对地面和地球附近用户进行优化设计,因此GNSS导航信号只能用于低轨航天器的定轨。将该信号用于中高轨用户航天器定轨时,由于天线波束角限制,面临可视导航卫星数目少、定轨精度差等问题,而高频段和宽扫描范围的星间链路,能够有效克服这些问题。文献[7]中主要对利用GNSS实现用户航天器定轨的可行性进行了初步分析,对具体的应用方式和策略并没有相关文献报道。
GNSS星间链路有广播型和指向型两类,指向型是未来导航系统的发展趋势。对于指向波束GNSS星间链路而言,由于可用于用户航天器的星间链路资源有限,要同时保证导航星座和中高轨用户航天器的需求,系统需要根据用户航天器概略轨道及定轨要求进行链路规划,使用户航天器能够接收到星间链路测距信号。本文主要针对不同星间链路规划、调度模式下的用户航天器定轨精度进行仿真分析,可为后续利用GNSS星间链路实现用户航天器定轨提供参考。
2 数学模型
由于GNSS的L频段信号主要服务于距地面高度1000 km以下的用户航天器,本文重点探讨利用GNSS星间链路对传统L频段所不能覆盖的中高轨用户航天器进行定轨的应用模式,主要包括用户航天器建立链路方式及定轨策略研究。
2.1 定轨原理
对于用户航天器,可根据其概略轨道位置进行链路规划,调度数颗几何可视的GNSS卫星,使其星间链路波束指向用户航天器位置来执行测定轨任务。当用户航天器获得一定的观测量时,可利用动力学法定轨,即根据获取的GNSS星间链路观测数据,采用卡尔曼(Kalman)滤波方法结合航天器动力学模型对运动状态参数进行最优估计。
2.2 测量模型
2.2.1 测量拓扑
1)高轨用户航天器建立链路方式
对轨道高于GNSS星座的高轨用户航天器来说,其所能接收到的导航卫星星间链路信号是从其下方地球对面的中高轨GNSS卫星发出的,须满足导航卫星星间链路的离轴角α大于地球遮挡角φ,并且小于星间链路天线的最大波束扫描范围Φ,即

地球遮挡角φ对GNSS的MEO导航卫星和GEO导航卫星来说,分别为15°和10°,星间链路天线最大扫描范围Φ为70°。图1以GEO用户航天器为例,说明高轨用户航天器与GNSS可视卫星的建立链路范围。
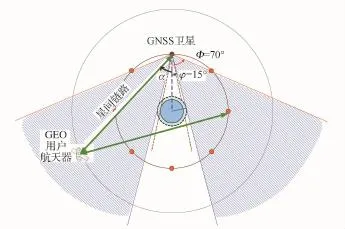
图1 GEO用户航天器与GNSS卫星建立链路示意Fig.1 Crosslink between GNSS satellite and GEO user spacecraft
考虑到现有GNSS卫星星间链路天线主要采用对地安装模式,因此本文假设高轨用户航天器星间链路接收天线同样采用对地安装模式,即满足式(1)条件的导航卫星可与高轨用户航天器建立星间链路。
2)中低轨用户航天器建立链路方式
对轨道高度低于GNSS星座的中低轨用户航天器而言,其接收天线在航天器本体上的安装可采用上置或下置方式,为减少导航卫星与用户航天器之间的绝对距离和地球遮挡,常采用天线上置安装方式,此时,其所能接收到的导航卫星星间链路信号是从其上方的中高轨GNSS卫星发出的,须满足导航卫星星间链路的离轴角α小于最大波束扫描范围Φ,并且用户航天器的观测仰角θ大于阈值η,即

式中:星间链路最大扫描范围Φ为70°;用户仰角阈值η为5°;β为星间链路与用户径向(用户航天器与地心连线)的夹角。
图2说明了LEO用户航天器与GNSS可视卫星的建立链路范围。

图2 LEO用户航天器与GNSS卫星建立链路示意Fig.2 Crosslink between GNSS satellite and LEO user spacecraft
在中低轨用户航天器天线采用上置安装方式时,式(2)的第1个条件自然满足,只要对第2个条件进行判断,满足该条件的导航卫星即可与中低轨用户航天器建立星间测量链路。
2.2.2 观测模型
当星间链路采用双向伪码测距体制时,与地面定位用户的伪距测量模型类似,GNSS星间链路伪距观测量由测量到达时间差(TOA)获得。

式中:ρr和ρt分别为用户航天器接收和发射星间链路信号时的GNSS星间链路伪距观测量;c为光速;tu,r和tu,t分别为用户航天器接收和发射星间链路测距信号时的钟面时;tSt和tSr分别为GNSS卫星发射和接收星间链路测距信号时的钟面时。
考虑观测量中的GNSS星历误差、卫星钟差、电离层延迟(高轨用户航天器可忽略)、相对论效应、天线相位中心误差和星间链路收发设备时延等各项误差,并进行修正,则GNSS星间链路伪距观测方程可以表示为
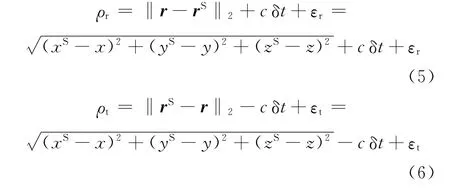
式中:用户航天器和导航卫星的三维位置分别为r=[x y z]T和rS=[xSySzS]T;||(*)||2表示矩阵的2-范数;δt为用户航天器钟差;εr和εt分别表示用户航天器接收和发射星间链路信号时经过伪距观测模型修正后的残余测量误差。
实际上,用户航天器接收和发射星间链路信号的时刻不同,但可以忽略这一收发时间间隔,对双向测量进行测量时间归化处理,将式(5)和式(6)相加,即可基本消除用户航天器钟差影响,从而得到仅含导航卫星位置参数的观测方程,利用该方程可对用户航天器位置进行求解。

由于星间链路收发间隔时间很短,因此时间归化的误差对定轨结果的影响很小。
2.3 定轨模型及参数解算
采用动力学法进行定轨解算,以用户航天器位置、速度和动力学参数作为状态向量,对航天器运动动力学方程进行线性化近似后,可得到其动力学状态向量转移方程为

式中:xk为tk历元的用户航天器三维位置、速度、光压参数等动力学状态参数的改正量;Φk,k―1为一步状态转移矩阵;wk为动力学噪声,其协方差矩阵为Σwk。
以参考轨道为初值,将观测方程式(7)线性化,观测误差方程可简化表示为

式中:Lk为tk历元的星间链路伪距观测量;Hk为观测矩阵,见式(10);εk为观测噪声,其协方差矩阵为Σk。

定轨时采用卡尔曼滤波算法如下。
1)状态预测

2)测量更新
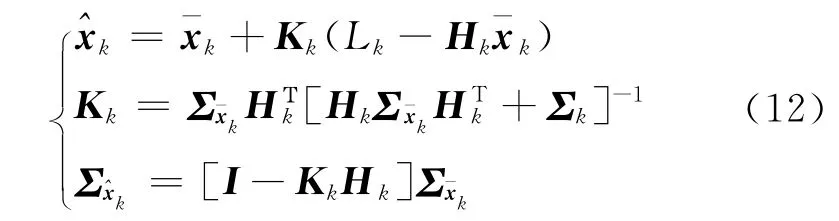
式中:Kk为滤波器增益系数;为最优估值的协方差矩阵;I为单位矩阵。
如果给定用户航天器概略轨道参数参考值X*(t)、先验待估参数和先验协方差矩阵,即可利用上述方法求得tk时刻的最优估计值,从而得到改进后的轨道。

2.4 定轨流程及影响因素分析
利用GNSS星间链路实现用户航天器定轨的大致流程,如图3所示。
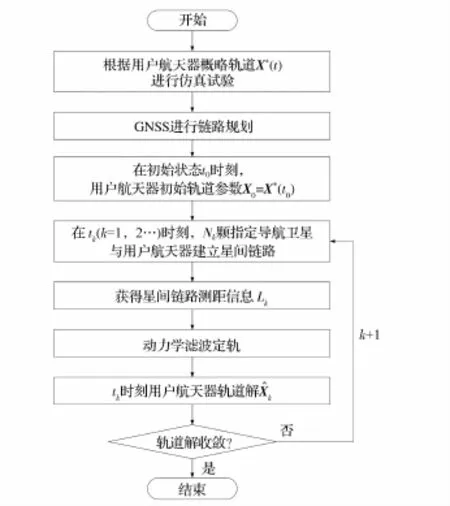
图3 应用GNSS星间链路的定轨流程Fig.3 Orbit determination process using GNSS crosslink
由图3的定轨流程可以看出:当用户航天器动力学模型基本确定后,星间测量精度、频度和星间测量拓扑结构是影响定轨精度的主要因素。星间测量精度由星间链路体制确定,而测量频度和测量拓扑结构则取决于链路规划。对用户航天器而言,GNSS星间链路系统可以根据其概略轨道进行链路规划,在某时刻调度某些导航卫星的星间链路天线指向用户航天器,并与其建立测距链路。若令所有几何可视范围内的导航卫星都持续地与用户航天器建立链路,理论上,定轨精度会相对提高。由于GNSS星间链路首先要服务于系统内部的导航卫星,用户航天器的可用的资源有限,并且对用户航天器而言,过高的精度也没有必要,既会增加计算复杂度,又会造成星间链路资源的浪费,因此要综合平衡用户航天器的定轨精度需求和可用链路资源,对星间链路进行合理规划。
3 仿真试验及结果分析
链路规划设计的核心是确定测量频度和测量拓扑结构。由于星间链路定轨过程复杂,很难构建准确的理论分析模型,因此仿真分析方法是通常采用的分析策略。下面从用户航天器与GNSS建立星间链路的时间间隔、每次建立链路时的导航卫星数目入手,通过研究不同规划情况下的用户航天器定轨精度确定合理的链路规划方案。仿真分析的重点是研究链路测量频度、链路条数与定轨精度之间的关系,分别针对低轨和高轨两种用户航天器轨道展开分析。本文仿真试验采用的GNSS星座构型为Walker-δ24/3/2,轨道高度为24 000 km,倾角为55°,采用动态指向型星间链路,波束角为4°,扫描范围为±70°[8-9]。
3.1 高轨用户航天器定轨试验
考虑到高轨用户航天器相对于GNSS卫星运动较慢,可采用广播星历,将星历误差设置为2.00 m,测距随机误差设置为0.65 m,残余系统偏差设置为0.20 m。仿真起止时间为2012年2月1―8日。高轨用户航天器轨道参数为:轨道半径为42 164.17 km的GEO,轨道倾角和偏心率为零。仿真标准轨道考虑的动力学模型包括:地球引力场采用8阶次JGM3模型;考虑日月引力,日月历书采用JPL DE 405星历;采用IERS2003固体潮模型;太阳光压采用球模型;同时考虑尺度因子和太阳翼方向参数。地球定向参数(EOP)采用IERS B公报参数。
GEO用户航天器与GNSS的观测间隔设置为5min、30min、60min、120min、360min这5种模式,在同一时刻建立GNSS星间链路的数目设置为10条、5条、2条、1条,采用动力学法进行定轨解算。将不同应用模式下的GEO用户航天器轨道三维位置误差均方差作为评价标准,总结如表1所示。
由于篇幅所限,以下只展示部分径向(R)、切向(T)、法向(N)轨道误差结果,见图4和图5。综合比较图4和图5,并结合表1的定轨精度评价结果可以看出:用户航天器与GNSS卫星建立星间链路的频度越高、数目越多,则动力学法进行轨道改进的效果越好。当观测间隔足够密集时,如每5min进行1次链路规划,则即使每次只有1条观测链路,也能使GEO用户航天器达到5 m以内的定轨精度。随着观测间隔的加长,达到一定精度所需的链路数目增多,如每6 h(360min)进行一次观测时,需要每次规划10颗导航卫星指向用户航天器,才能达到5 m以内的定轨精度;若每6 h进行1次观测,每次仅规划1条链路,就能达到40 m以内的定轨精度。
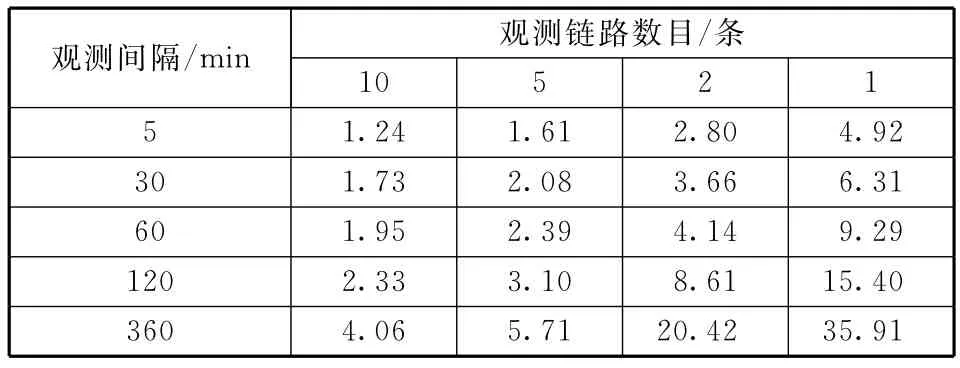
表1 GEO用户航天器轨道三维位置误差均方差Table 1 Three dimension position error variance of GEO user spacecraftm
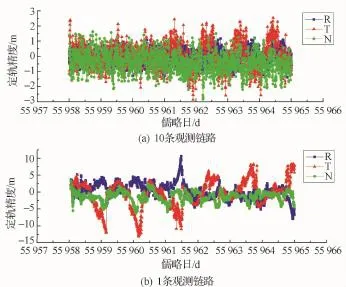
图4 观测间隔5min的GEO用户航天器定轨精度Fig.4 Orbit determination accuracy of GEO user spacecraft with observation intervals of 5min
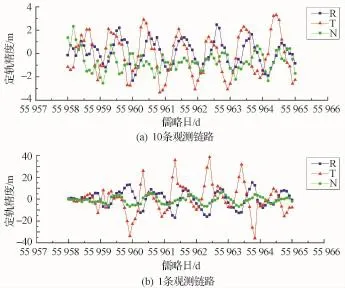
图5 观测间隔120min的GEO用户航天器定轨精度Fig.5 Orbit determination accuracy of GEO user spacecraft with observation intervals of 120min
相比缩短观测间隔,增加每次观测链路数目对轨道改进的效果提升更明显。例如:要达到5 m精度时,若每5min观测1次,在6 h内须要调度卫星的次数为120次;若在6 h内1次调度10颗卫星观测,也可以达到5 m的精度要求。因此,建议增加每次观测链路的数目,而非缩短观测间隔,以尽量少的总观测链路数目(即尽量少的星间链路的调度总次数)来满足GEO用户航天器的定轨需求。
总的来说,对一般GEO用户航天器,定轨精度的需求为百米量级,利用GNSS星间链路都能够达到。当规划的观测间隔足够密集,或者每次观测的链路足够多时,可以达到米级的定轨精度。目前,我国的GEO航天器一般采用3~5个区域地面站进行定轨,能达到50 m左右的定轨精度水平。相比较而言,本文提出的利用GNSS星间链路进行定轨,可以达到更高的精度,且不依赖地面站,能大大缩减建设维护费用。
3.2 低轨用户航天器定轨试验
针对GNSS的普通L频段下行信号导航业务所不能覆盖的2000 km轨道高度LEO用户航天器,进行定轨仿真计算。考虑到LEO用户航天器相对GNSS卫星运动较快,不利于传输广播星历,且一般定轨精度要求较高,因此采用精密星历,将星历误差设置为0.50 m,测距随机误差设置为0.65 m,残余系统偏差设置为0.20 m。
LEO用户航天器与GNSS的观测间隔设置为5min、30min、60min、120min、360min这5种模式,在同一时刻建立GNSS星间链路的数目设置为10条、5条、2条、1条,采用动力学法进行定轨解算。将不同应用模式下的LEO用户航天器轨道三维位置误差均方差作为评价标准,总结如表2所示。
由于篇幅所限,以下只展示部分轨道误差结果,见图6和图7。可以看出,当链路数目为1条时,定轨精度易出现较大跳变。这是由于对所有可视卫星的筛选并不是最优规划,当链路数目不足时,可能在某些历元选出的星间链路观测几何构型较差。综合比较图6和图7,并结合表2的定轨精度评价结果可以看出:LEO用户航天器与GNSS卫星建立星间链路的频度越高、数目越多,动力学法进行轨道改进的效果越好。当观测间隔足够密集时,如每5min进行1次链路规划,则每次1条观测链路也能使LEO用户航天器达到2 m左右的定轨精度。随着观测间隔的加长,如每6 h(360min)进行1次观测时,则要每次规划5颗导航卫星指向用户航天器,才能达到1 m左右的定轨精度;若每6 h进行1次观测,每次仅规划1条链路,则能达到12 m以内的定轨精度。
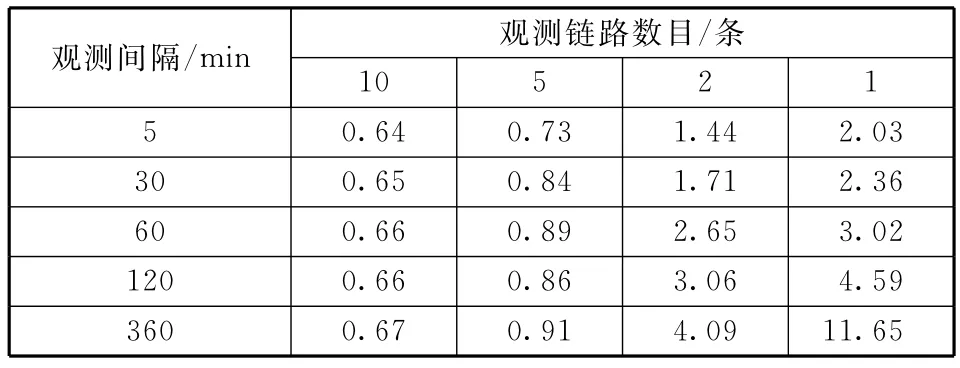
表2 LEO用户航天器轨道三维位置误差均方差Table 2 Three dimension position error variance of LEO user spacecraft m
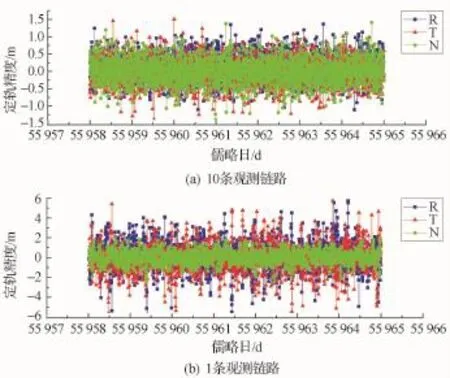
图6 观测间隔5min的LEO用户航天器定轨精度Fig.6 Orbit determination accuracy of LEO user spacecraft with observation intervals of 5min
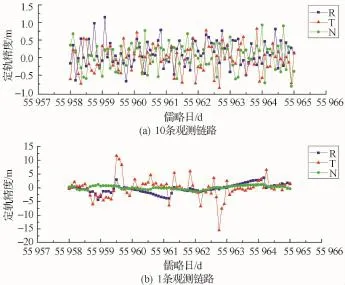
图7 观测间隔120min的LEO用户航天器定轨精度Fig.7 Orbit determination accuracy of LEO user spacecraft with observation intervals of 120min
当观测链路数目增加到一定程度,加密观测频度的改进效果有限;相比缩短观测间隔,增加每次观测的链路数目对轨道改进的效果提升更明显。例如:要达到1 m精度时,若每5min观测1次,在6 h内须要调度导航卫星约72次;而若在6 h内1次调度5颗导航卫星观测,也可以达到1 m的精度要求。因此,建议增加每次观测链路的数目,而非缩短观测间隔,以尽量少的总观测链路数目(即尽量少的星间链路的调度总次数)来满足LEO用户航天器的定轨需求。另外,当观测链路数目增加到一定程度时,如每次与8~10颗导航卫星建立链路,5min~6 h的观测间隔下都可以达到0.70 m左右的观测精度,定轨误差基本由星间链路的测距误差及星历误差引起,已经达到了GNSS星间链路实现LEO用户航天器定轨的理论精度极限,再改变链路规划方式也难以继续改善定轨结果。
总的来说,对于大部分LEO用户航天器,定轨精度的需求为米量级,利用GNSS星间链路能够达到。当每次规划的观测链路足够多时,可以达到1 m以内的定轨精度。目前,LEO用户航天器一般采用区域布设地面站进行跟踪定轨,只能得到有限的观测弧度,在弧段内采用激光、精密测距及其变率测量系统(PRARE)、多普勒定轨和无线电定位系统(DORIS)等技术手段,后处理定轨精度可优于10 m;采用GNSS接收机,定轨精度可优于1 m。相比较而言,本文提出的利用GNSS星间链路进行定轨,不受地域局限,可以完成实时定轨并达到更高的精度。
4 结束语
本文研究了GNSS星间链路应用于用户航天器定轨的模型,设计了应用模式及流程,并针对不同应用模式进行了仿真分析。结果表明:用户航天器与GNSS卫星建立星间链路的频度越高、数目越多,动力学法进行轨道改进的效果越好;增加观测链路数目比加密观测间隔更能有效改善定轨精度,在具体工程应用中应根据用户航天器精度需求进行链路规划配置。
需要指出的是,在本文的仿真中,按一定数目规划导航卫星时是在几何可视范围内随机选取,并不一定能达到最优的观测几何构型。关于GNSS星间链路应用于用户航天器定轨时的链路规划,是另一个值得研究的工程问题,当用户航天器按照最优规划与GNSS卫星建立链路时,将能够得到更高的定轨精度。
(References)
[1]Holmes J K,Raghavan S.A summary of the new GPS IIR-M and IIF modernization signals[C]//Proceedings of the 2004 IEEE 60th Vehicular Technology Conference.New York:IEEE,2004:4116-4126
[2]Luba O,Boyd L,Gower A,et al.GPS III system operations concepts[J].IEEE Aerospace and Electronic Systems Magazine,2005,20(1):10-18
[3]Anderson M P,Langer J.Crosslink for the next-generation GPS[C]//Proceedings of the 2003 IEEE Aerospace Conference.New York:IEEE,2003:1589-1596
[4]Liu W,Li Z,Gong X.Study on combined orbit determination of navigation satellites with ground tracking observation and crosslink ranging observation[C]// Proceedings of ION GNSS 2009.Manassas:The Institute of Navigation,2009:1561-1572
[5]陈智,张其善.Galileo系统在空间飞行器定位中的应用[J].宇航学报,2004,25(5):576-579 Chen Zhi,Zhang Qishan.The application of Galileo system on spacecraft positioning[J].Journal of Astronautics,2004,25(5):576-579(in Chinese)
[6]樊士伟,孟轶男,高为广,等.航天器测定轨技术发展综述[J].测绘科学技术学报,2013,30(6):549-554 Fan Shiwei,Meng Yinan,Gao Weiguang,et al.Summarizing on the development of spacecraft orbit determination technology[J].Journal of Geomatics Science and Technology,2013,30(6):549-554(in Chinese)
[7]孟轶男,樊士伟,李罡,等.利用GNSS星间链路对中高轨航天器测定轨的可行性研究[J].武汉大学学报(信息科学版),2014,39(4):445-449 Meng Yinan,Fan Shiwei,Li Gang,et al.Research on orbit determination of medium-high earth orbital satellite using GNSS crosslink ranging observations[J]. Geomatics and Information Science of Wuhan University,2014,39(4):445-449(in Chinese)
[8]甘庆波,马剑波,徐劲.基于星敏感器和星间链路的卫星星座自主定轨研究[J].中国科学:物理学 力学 天文学,2010,40(4):471-480 Gan Qingbo,Ma Jianbo,Xu Jin.Autonomous orbit determination of satellite constellation based on star sensor and ISLs[J].Science China Physics,Mechanics&Astronomy,2010,40(4):471-480(in Chinese)
[9]张育林,范丽,张燕,等.卫星星座理论与设计 [M].北京:科学出版社,2008 Zhang Yulin,Fan Li,Zhang Yan,et al.Satellite constellation theory and design[M].Beijing:Science Press,2008(in Chinese)
(编辑:夏光)
Analysis of Spacecraft Orbit Determination Method Using GNSS Crosslink
MENG Yinan1FAN Shiwei1YANG Qiangwen1SONG Xiaoyong2
(1 Beijing Institute of Tracking and Telecommunication Technology,Beijing 100094,China)
(2 Xi'an Research Institute of Surveying and Mapping,Xi'an 710054,China)
Considering the limited resource of GNSS(Global Navigation Satellite System)crosslink,an orbit determination model is established based on GNSS crosslink,application process is designed and the impacts of crosslink measurement frequency and crosslink number on orbit determination accuracy are especially studied.Experiments of high-orbit and low-orbit user spacecraft are conducted respectively.Results show that dynamic orbit improvement gets better with more frequent planning and more links;for high-orbit user spacecraft using broadcast ephemeris,orbit accuracy can reach within 40m with one observation link every 6 hours;for low-orbit user spacecraft using precise ephemeris,the accuracy is around 1m with 5 links every time.
GNSS;crosslink;orbit determination;crosslink planning;application mode
V412.41;P228
:ADOI:10.3969/j.issn.1673-8748.2015.05.005
2014-06-06;
:2015-07-01
孟轶男,女,硕士研究生,研究方向为卫星导航技术与应用。Email:mengyinan0915@163.com。