基于信息级的T-Rn型多基地系统定位方法研究
2015-02-24曹晋龙程嗣怡周东青
曹晋龙,王 星,程嗣怡,周东青
(1. 空军工程大学 航空航天工程学院, 西安 710038; 2. 解放军61267部队, 北京 101114)
·信号/数据处理·
基于信息级的T-Rn型多基地系统定位方法研究
曹晋龙1,2,王 星1,程嗣怡1,周东青1
(1. 空军工程大学 航空航天工程学院, 西安 710038; 2. 解放军61267部队, 北京 101114)
提出了一种基于信息级的T-Rn型多基地系统目标协同定位方法,阐述了该定位方式的原理以及具体流程。首先单个接收站根据时间差-测向信息进行定位,然后主站中心利用加权最小二乘算法对4个接收站的定位结果进行融合。在推导出测距和定位误差公式后,分析了影响定位精度的几个因素,用几何稀释精度(GDOP)对定位误差做出分析,并推导出该算法的理论误差性能下界。仿真实验表明,融合后主站的定位精度明显高于单个接收站,且逼近于误差的克拉美罗下界(CRLB),具有一定的工程应用价值。
目标定位;加权最小二乘算法;几何稀释精度;克拉美罗下界
0 引 言
近年来不论是在测量精度还是在抗干扰性能上,对军用雷达的要求日趋严峻。伴随着电子侦察干扰技术的进步和反辐射导弹的广泛应用,以及隐身技术取得了突破性进展,隐身飞行器已列入装备,这样一方面降低了单基地雷达的探测能力,另一方面单基地雷达的发射能量容易被电子侦察定位系统探测到,反而使雷达本身成为被攻击的点,因此对其生存能力构成严重威胁[1]。双多基地雷达是近年来雷达领域的一大研究热点,其系统具备反隐身、抗电子干扰、抗反辐射导弹以及对付低空/超低空突防等方面的巨大潜力,因此日益受到重视[2-4]。
双多基地雷达系统的优点在于该体制中发射站和接收站可远距离分置,其中:发射站可部署在某个受到保护的地方或反辐射导弹攻击范围以外的地方(它可以在地面、空中或卫星上);随着现代通信技术的发展,收发基地可以通过GPS、无线微波通信、北斗卫星等技术实现时间和频率上的同步[5-6],这就允许收发基地可以置于空中运动载体上,而且由于接收站不发射只接收是无源的能够实现射频隐身,这样反辐射导弹和定向干扰对无源接收站的作用都将被削弱甚至失效。
定位是实现攻击的前提。快速有效的协同定位有助于在空战中掌握先机,先于敌方实施干扰攻击,掌握战争主动权。相比于单平台的定位,协同定位精度更高,探测范围更广。本文将对有配合照射源的多基站协同定位问题进行深入分析,提出一种基于信息级的T-Rn型多基地系统目标定位方法。多基地系统的接收站放置于空中,各接收站首先独立对目标进行定位,并给出单站在三维空间中的定位模型。然后,主站对各接收站的定位结果加权融合,并分析其定位误差,且与误差的CRLB进行对比,通过计算机仿真验证该方法的有效性。
1 基于信息级的多机协同定位
1.1 T-R型系统时间差-测向定位方法
本文假定发射站放置在战场后方地面,其基本思想是:由于接收站接收的是我方电磁信息,辐射源参数都为已知,把发射站发射的辐射源信号特征存储于空中接收站的数据库,用于到达电磁信号的识别,空中接收站可实现基于合作信号的无源探测[7]。此外发射站可发射低截获概率信号,以降低敌方对我方电磁信号的发现概率。首先由发射站发射电磁波,直达电磁波到达接收站的时间记为t0,经目标散射后到达接收站;然后,接收站获取目标的方位角和俯仰角信息并记录反射信号到达时间为t1,则时间差t=t1-t0;最后,把时间差、测向信息进行融合,以获取目标的位置坐标,如图1所示。
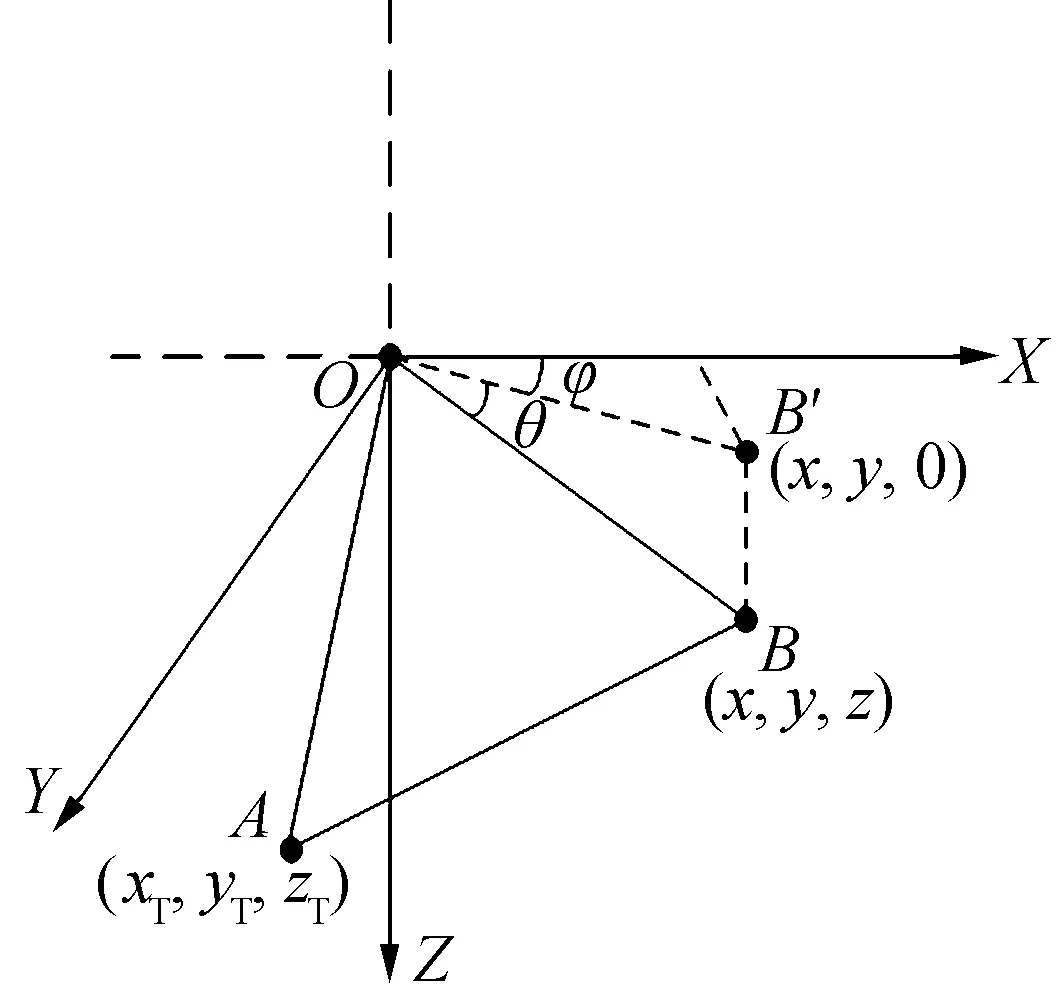
图1 T-R型双基地系统三维定位示意图
由于在空战中主要考虑敌机相对我机的空间位置,故选取以空中接收站R质心为坐标原点O的三维空间机体坐标系。X轴为接收站载机纵轴机头正对方向,Y轴为接收站载机右机翼方向,Z轴方向由右手螺旋定则朝机身下方方向,设发射站T的坐标位置为A(xT,yT,zT),目标的坐标位置为B(x,y,z),目标在XOY平面上的投影点为B′(x,y,0),如图2所示。由图中几何关系可以列出时间差-测向定位方程组
(1)
式中:t为直达波和经目标反射后到达接收站的时间差;φ为目标相对接收站的方位角;θ为目标相对接收站的俯仰角;c为电磁波传播速度;L为发射站和接收站之间的直线距离;r为目标到接收站的直线距离。
目标位置在机体坐标系下的极坐标为距离、方位角和俯仰角,记为(r,φ,θ)。把式(1)化简后得
(2)
在以空中接收站为原点的机体坐标系中,通过球坐标关系解算出目标点相对于接收站的坐标位置(x,y,z),即

(3)
1.2T-Rn型系统信息级协同定位方法
协同定位包含信息级协同定位和数据级协同定位:信息级协同定位是将多机定位结果融合处理从而实现定位;数据级协同定位是利用融合编队内各平台的侦收的数据信息实现定位。本文重点研究给予信息级的协同定位。信息级协同定位主要利用多机分布式单平台进行协同定位,其主要原理是利用飞机编队中的每架飞机进行单站定位,然后将单站定位结果在主站控制中心进行融合处理,最后解算出敌目标的位置信息。在上小节中研究了T-R型双基地系统的定位方法,在此基础上本节将研究基于信息级的T-Rn型多基地定位方法。
在协同定位各飞机平台的职能如下:副站主要完成对信号的截获、初步的分选识别和对目标位置信息的解算;主站除完成副站所有的功能外,还要完成综合决策控制和对各个副站解算出的目标位置信息进行融合解算,最后得敌目标的位置信息。协同定位示意图如图2所示。

图2 信息级定位框图
在T-Rn型模式下,具体的协同定位流程如下:首先,长机和各僚机通过已知参数和位置的配合辐射源对目标进行照射;随后,各副站将各自对目标的定位结果通过数据链传送给中心站,长机在收到副站上报的定位信息后,对各单站定位结果进行加权融合处理,处理后的定位结果即为目标位置信息;最后中心站继续对各副站进行时间配准,同时各个副站根据主站发送的决策指令,对特定脉冲数据进行侦收定位,直到中心站发出停止协同定位指令。
2 WLS融合定位算法及误差分析
2.1 单接收站定位误差分析
由上述定位方程组可知,影响定位精度的因素主要有时间测量误差、测向(包括俯仰和方位)误差。由于接收站是运动的,在考虑定位精度时必须考虑发射站坐标获取误差,即站址误差带来的影响。为了准确描述定位误差与几何位置的关系,用“定位精度的几何稀释”即GDOP来分析误差[8],对式(1)求微分,
V1=CdX+Xs
(4)
其中
根据式(4),用伪逆法可解得目标的定位误差估值
dX=(CTC)-1C[V1-Xs]
(5)
2.2 中心站融合定位及误差分析
加权最小二乘算法(WLS)是一种应用非常广泛的点估计算法[9],并充分考虑了样本子集之间的相关性。一般地说,当参与融合的接收站数目较少(小于等于5)时,通常可忽略各接收站位置集之间的相关性。但当参与融合的接收站数目较多(大于5)时:一方面,某些站的位置集之间的相关性明显增大,应用WLS算法要涉及到更加复杂的运算,因此应用起来相当困难;另一方面,如果向主站决策控制中心传递的数据较多,不但需要较大的通信带宽,更需要主站具有较强的数据处理能力,增大了系统的复杂性,同时也降低了时效性。
设第j个接收站给出的目标位置及其误差分别为Xj和dXj(j= 1,2,…,m),则m个接收站的位置自己对应的目标位置矢量与误差之间的关系为

(6)
其中
式中:Ii(i= 1,2,…,m)为与矢量X同维的单位矩阵;V~N(0,B),B为km×km阶矩阵,k为目标位置矢量X的维数,则
B=E[VVT]=

(7)
(8)
式中:Bij为k×k阶矩阵,故m个接收站的位置子集采用WLS算法进行线性组合后,得到的目标位置估计值及其误差协方矩阵分别为
(9)
PWLS=(HTB-1H)-1
(10)
令
B-1=G=[Gij]m×m
式中:Gij(i,j= 1,2,…,m)为k×k阶矩阵,则
(11)
(12)
本文主要研究4个接收站之间的定位融合,故不考虑各接收站位置集之间的相关性。若m个接收站的位置子集之间不相关,则
B=diag[B11,B22, …,Bmm]
(13)
(14)
则
(15)
(16)
故可以得到定位误差的几何稀释(GDOP)为
(17)
2.3 中心站位置估计的CRLB
P[Z|X]=P[z1,z2,…,zm|X]=
(18)
网络中心战目标位置估计Fisher信息矩阵为
J=E{[XlnP(Z|X)][XlnP(Z|X)]T}
(19)
网络中心站目标位置估计的克拉美罗下界为
PCRLB=(J)-1
(20)
3 定位算法性能仿真分析
在一发四收的仿真环境中,飞行编队为Y型分布,以长机A为机体坐标系原点,设发射站坐标T(-2,0.5,6)km,接收长机A的坐标RA(0,0,0)km,接收僚机B的坐标RB(-15,20,0)km,接收僚机C的坐标RC(15,20,0)km,接收僚机D的坐标RD(0,-25,0)km。目标高度10 km,目标位置的范围:x方向±200 km,y方向±200 km,站址误差标准差σs=3 m,时间差误差σt=10 ns,方位角和俯仰角具有相同测量误差标准差σφ=σθ=σ=3 mrad。仿真结果如图3~图9所示。

图4 接收机RB定位的GDOP分布图

图5 接收机RC定位的GDOP分布图

图6 接收机RD定位的GDOP分布图

图7 基于信息级协同定位的GDOP分布图
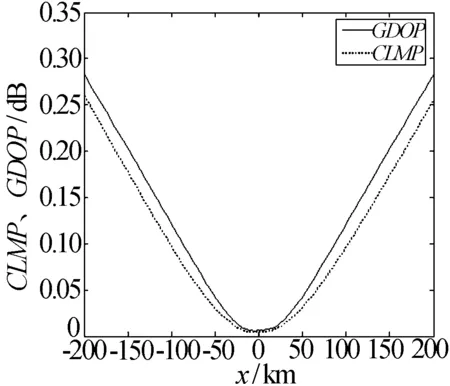
图8 基于信息级协同定位主站GDOP

图9 基于信息级协同定位主站GDOP
比较图3~图7可以看出,主站接收站A对各接收站定位结果进行加权最小二乘融合处理后的定位精度明显高于任何单个接收站的定位精度,对比两图中相对应的点可以发现,各个区域的定位精度都得到了很大程度上的改善。如图8和图9所示,以y方向为例,无论是在距离主站较近的20 km处还是在距离主站较远的150 km处,主站融合定位的GDOP值都逼近CRLB。
通过仿真分析,T-Rn型多基地系统的定位性能明显高于T-R型双基地系统的定位性能,这样的优点是能获得更好的定位效果,但其缺点也是明显的,数据传输及融合的过程难免增加了时间的延迟,这对于实时性要求很高的定位系统是不可取的。T-R型双基地系统虽然定位精度相对较差,但其计算简单,运算较快,可以实时得到定位结果。
4 结束语
本文主要研究了一种基于信息级的T-Rn型多基地系统定位方法。主站中心在各副站定位结果的基础上,加权融合各接收站定位信息,得到定位精度更高的目标位置信息。定位精度是双多基地系统的一个重要技术指标,文中用GDOP对定位误差做出分析,推导了定位误差的克拉美罗下界。仿真结果表明主站加权融合后的定位精度明显提高,且GDOP值逼近于CRLB。研究结论有助于在提高作战飞机战斗效能的同时提高其整体的生存能力,对网络中心战中的探测侦察具有一定借鉴意义。
[1] 孙仲康, 周一宇, 何黎星. 单多基地有源无源定位技术[M]. 北京: 国防工业出版社,1996: 69-71. Sun Zhongkang, Zhou Yiyu, He Lixing. Mono-station/multi-station passive/active location technology[M]. Beijing: National Defense Industry Press, 1996: 69-71.
[2] 陈 军, 冯卫强, 赵虎强. 防空组网雷达“四抗”能力综合评估[J]. 指挥控制与仿真, 2009, 31(2): 62 -64. Chen Jun, Feng Weiqiang, Zhao Huqiang. General four resist ability evaluation of air defense radar net[J]. Command Control & Simulation, 2009,31(2): 62 -64.
[3] 晃淑媛. MIMO雷达若干关键技术研究[D].西安:西安电子科技大学, 2011. Chao Shuyuan. Study on some key technologies of MIMO radar[D]. Xi′an: Xidian University, 2011.
[4] Wang Haitao, Wang Jun, Li Hongwei. Target detection using CDMA based passive bistatic radar[J]. IEEE Journal of Systems Engineering and Electronics, 2012, 23(6): 858-865.
[5] 彭 芳, 左继章, 陈玉峰. 基于北斗卫星的双基地雷达时间和频率同步方法[J]. 弹箭与制导学报, 2007, 27(1): 18-20. Peng Fang, Zuo Jizhang, Chen Yufeng. A method of time and frequency synchr-onization based on beidou satellite for bistatic radar[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2007, 27(1): 18-20.
[6] 姜 军,张世文,张晨新. 现代地面防空系统时间同步体系分析[J]. 现代雷达, 2012,34(12): 20-23. Jiang Jun, Zhang Shiwen, Zhang Chenxin. Analysis of time synchroulzation system for modern ground antiaircraft systems[J]. Modern Radar, 2012,34(12): 20-23.
[7] 王 星. 航空电子对抗原理[M]. 北京:国防工业出版社, 2008:138-145. Wang Xing. Principles of aircraft electronic countermeasure[M]. Beijing: National Defense Industry Press, 2008: 138-145.
[8] Wang Wei, Deng Zhixin, Zhao Guoqing. Research of coastal station distribution algorithm based on GDOP in wireless positioning system[C]// 2007 Mechatronics and Automation. Harbin: IEEE Press, 2007: 3150-3154.
[9] 罗炬锋, 付耀先, 王营冠. 基于RSSI测距的WLS定位算法[J]. 华中科技大学学版:自然科学版, 2011, 39(11): 34-38. Luo Jufeng, Fu Yaoxian, Wang Yingguan. WLS location algorithm using RSSI measurent[J]. Huazhong University of Science & Technology: Natural Science Edition, 2011,39(11): 34-38.
[10] 曾雄飞,孙贵青,黄海宁. 水下目标方位估计的克拉美-罗界研究[J]. 电子与信息学报, 2013,35(1): 92-28. Zeng Xiongfei, Sun Guiqing, Huang Haining. Craomer-rao bound of position estimation for underwater source[J]. Journal of Electronics & Information Technology, 2013,35(1): 92-28.
[11] 姜秋喜. 网络雷达对抗系统导论[M]. 北京:国防工业出版社, 2010:53-62. Jiang Qiuxi. Introduction of network radar countermeasure system[M]. Beijing: National Defense Industry Press, 2010: 53-62.
曹晋龙 男,1989年生,硕士研究生。研究方向为电子对抗理论与技术。
王 星 男,1965年生,博士,教授。研究方向为电子对抗理论与技术。
程嗣怡 男,1980年生,副教授。研究方向为电子对抗理论与技术。
周东青 男,1988年生, 博士研究生。研究方向为电子对抗理论与技术。
A Study on the Method of T-Rn Type Multi-station System Cooperating Target Localization Based on Information-level
CAO Jinlong1,2,WANG Xing1,CHENG Siyi1,ZHOU Dongqing1
(1. Aero & Astronautics Engineering School, AFEU, Xi′an 710038, China) (2. The Unit 61267 of PLA, Beijing 101114, China)
An information-level T-Rn type cooperating target localization method of the multi-station system is proposed in this paper, in which the concrete process is expounded of this kind of localization way. Firstly, single receivers complete the localization according to time-difference-direction-measurement information. Then, the center station applies the weighted least squares(WLS) to merge together the localization results of the four receivers. After deducing the ranging and localization error formulas, several factors affecting the localization precision are analyzed while geometrical dilution of precision (GDOP) is applied to analyze the localization error and the theoretical lower bound of error performance is deduced. It is demonstrated in the simulating experiment that the localization precision of the center station is much higher than that of a single receiver, reaching the Cramer-Rao lower bound(CRLB) of the error, having a kind of engineering applying value.
target localization; weighted least squares; geometrical dilution of precision; Cramer-Rao lower bound
10.16592/ j.cnki.1004-7859.2015.10.009
陕西省自然科学基金资助项目(2012JQ8019)
曹晋龙 Email:caojl1989@163.com
2015-06-06
2015-09-20
TN953+.7
A
1004-7859(2015)10-0034-05
