一种新型升降装置的设计
2015-02-24罗煜林陈怀民
罗煜林,陈怀民
(集美大学机械工程学院,福建厦门 361021)
随着人类社会不断进步,工业水平和科学技术不断发展,人们越来越多地在生产过程中利用先进技术将自己从繁重、乏味的工作中解脱出来。现在,工业加工过程中,自动化已经成为人们追逐的目标,自动化设备不仅可以提高工人的劳动生产效率、节省人力资源、降低产品的生产成本,而且还可提高产品的加工质量。因此,实现工业化生产自动化将成为未来的一种必然的趋势。
为提高设备自动化程度,改善设备柔性,需使用到一些机械装置。例如机械手、升降机构等。机械手柔性好,在处理复杂的工艺时效率高。但是,机械手成本高,中小型企业由于经济性,不会考虑使用机械手。而且在简单动作构成的工序中,机械手的使用价值就大打折扣了。这时专用自动化加工设备在提高自动化程度上就显得尤为重要。
升降机构作为大部分自动化设备所必须具备的机构,是提高自动化水平的重要手段,它可以用于物料的传送、零件的定位等。它不仅可以提高设备的自动化程度,还能改善设备的加工柔性。目前市场上存在的升降机构有蜗轮丝杆升降机、升降台、丝杆螺母升降机构、齿轮齿条升降机构、锥齿轮升降机构、皮带升降、链条升降等。但由于自动化的工作环境千差万别,市场已有的升降机构并不能完全满足所有升降环境。
在自动化设备设计中,会存在市场上已有的产品不能适用的情况,需要根据设计对象的实际需要,设计出符合工作要求的辅助装置。同时,为提高自动化加工设备的加工范围,需要设备具有柔性。作者的出发点是:设计的自动化设备的加工对象是一系列具有不同规格尺寸、精度较高的零件,要求升降装置具有一定的稳定性和高的精度。但是市场上没有合适的通用机构能满足这种工艺要求。从这个角度出发,提出一种新型升降装置。由于考虑到设备的经济性,它不仅可以手动控制,而且可以实现自动升降。它承载能力高、稳定性好。但缺点在于能调节的高度范围比较小。
1 装置的主要机械结构和功能
文中提出的装置从上到下主要由以下几个部件构成:2对T型槽传动装置、T型螺母、4副圆导轨、1根带有正反螺纹的螺杆、1个蜗轮蜗杆减速器、1副手轮。此装置两端呈对称分布,T型槽传动装置安装在顶端,下面联接着T型螺母,T型螺母与螺杆配合传动,螺杆联接蜗轮蜗杆减速器的蜗轮零件。当手轮带动蜗轮蜗杆减速器转动时,同时带动螺杆螺母传动,螺母与T型槽传动装置相互联接,由此带动两端T型槽的运动,由于螺杆攻有正反螺纹,所以T型槽传动装置会朝着相反方向运动。利用T型槽传动装置的斜面可以实现整个装置的升降。

图1 升降装置三视图
1.1 T型槽传动装置
T型槽传动装置是由两种不同参数且具有一定斜度的铁块组成,利用铁块的斜面可以调整装置的高度。体积较大的铁块材料是45号钢,其结构参数为:底面长宽300 mm×120 mm,两侧边长边高度75.68 mm,短边高度32 mm。斜面与水平面成20°角,在距离侧边30 mm处加工2个对称的T型槽,T型槽的方向与斜面平行。T型槽主要参数A×B×C为18 mm×32 mm×14 mm,具体参数可以参照机械设计手册.使用两个带有T型凸块的小楔形铁块来配套T型槽,小铁块的参数:底面长宽为100 mm×68.69 mm;两侧边高度,长高为40 mm,短高为15 mm。
T型槽传动装置中的斜铁块表面经过调制处理,表面粗糙度要达到0.8 μm,具体如图2所示。

图2 T型槽传动装置
1.2 螺母和螺杆
将一对T型、螺纹方向相反的螺母和两端攻有正反螺纹的螺杆组成传动机构。螺母的两肩攻两个螺纹孔,用于将螺母锁紧在大楔形铁块下方,利用蜗轮蜗杆减速器带动螺杆转动来带动整个装置的运动。螺杆长度为900 mm,两端螺纹长度为150 mm,规格M18×2.0。轴上加工一轴头,与蜗杆蜗轮配合,其直径与蜗轮孔径相同,为25 mm。轴头长度为92 mm,轴头上加工一键槽,键槽的尺寸规格为8 mm×92 mm。见图3。

图3 螺母螺杆三视图
1.3 圆导轨
所设计装置不需要高速运动,行程较短,考虑到经济性,在此处选用标准件圆导轨。圆导轨安装在大楔形铁块两侧,是通过直线轴承在光轴上滚动或滑动实现直线运动的。由于小滚珠直接和光轴接触,需要良好的防尘措施来保持清洁。
1.4 蜗轮蜗杆减速机
因为装置需要有自锁功能,所以选择了蜗轮蜗杆减速机。蜗轮蜗杆减速机还具有以下优势:(1)机械结构紧凑、体积轻巧、小型高效;(2)热交换性能好,散热快;(3)安装简易、灵活轻捷、性能优越、易于维护;(4)传动速比大、扭矩大、承受过载能力高;(5)运行平稳,噪声小,经久耐用;(6)适用性强、安全可靠性大。此装置的优点在于可用于空间位置紧凑的工作环境,所以要求减速机的结构紧凑、传动比大、扭矩大、承受过载能力高。
2 装置主要结构的受力分析
2.1 自锁现象
根据力学原理,如果所有作用力的合力位于摩擦角之内,则无论力多大,物块都将保持平衡状态,所以必须计算T型槽传动装置中斜铁块的摩擦角是否会发生自锁现象。因为整个装置是对称分布的,所以只需取其中一个角来分析即可,其受力简图见图4。
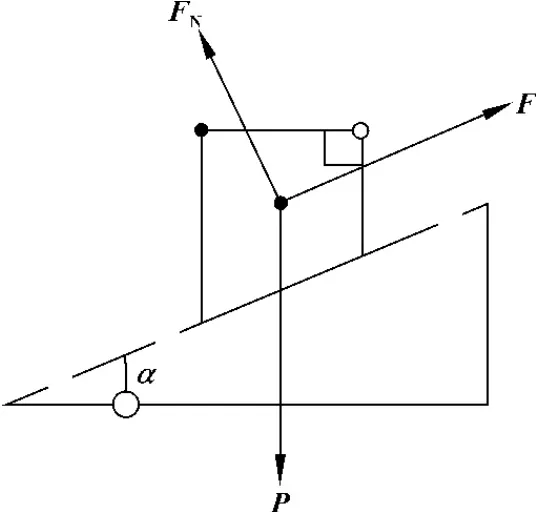
图4 斜铁块受力简图部分
经查阅可得45号钢之间的静摩擦因数fs=0.15(没有加润滑油的情况),根据自锁原理当tanα<fs时,无论P有多大,物块始终不动。可知α=20°,经计算:
tanα =tan20°=0.364
tanα>fs=0.15
所以装置不会自锁。
2.2 摩擦力和所需推力
装置不会自锁,还需计算大小斜铁块之间的摩擦力,以及需要多大的力才能将装置推动。因为对称,取其中一个作为分析对象即可,受力简图如图5所示。

图5 楔形铁块受力简图
由受力分析可知,当物块在快开始运动时,还处于平衡状态,则:

式中:FN为小楔形铁块受到的法向作用力,N;
Q为推动装置运动所需的作用力,N;
Fmax为装置开始运动时受到的最大摩擦力,N;
P为装置所承受的重力,N;
α为楔形铁块斜面与水平之间的角度;
fs为45号钢之间的静摩擦因数,为0.15(不加润滑油)。
将P=1 000 N、fs=0.15、α=20°代入可得:Q=544 N,Fmax=140.95 N。
因为有4个相同的装置,所以Q总=2 176 N。选取的蜗轮蜗杆减速器的传动比为1∶7.5,传动效率为82%。所输入的力大约为:

成年人可使出的力平均为702N,所以符合手动用途。当装置用于自动时,需要计算伺服电机额定功率。这样可以更好地选取伺服电机,以免选取功率过高造成浪费,或是选取功率过低损害伺服电机。但计算出的一般都是理论功率值,所以还需计算实际功率值。
2.2.1 升降装置伺服电机功率理论值计算
升降时所需的功率为:

式中:Ps为升降时所需功率的理论值,kW;
P为升降装置承受的载荷,N;
vs为升降装置运动时的速度,m/s;vs=0.01 m/s;
η1为伺服电机的效率,一般取η1=0.9;
η2为机械效率,一般取η2=0.75。
2.2.2 升降装置伺服电机功率实际值计算
电机的理论值与实际值有差距,存在这些差距的主要原因是:机构之间存在的各种摩擦力,T型槽传动装置、螺母、螺杆的加工误差,传动过程中的功率损耗等,所以升降装置的功率增加20%。升降装置的实际功率为:

求得升降装置伺服电机所需的功率为0.02 kW,可以选取额定电机功率为0.05 kW。
其他都是经过经验计算求得的,这里不做说明。
3 结束语
升降机构在自动化设备中会经常使用到,是提高设备自动化水平的重要手段,而且在选用升降机构上也比较灵活,并不是所有升降机构都可以适用于所有环境,所以有时在选用升降机构时要懂得适当地变通,设计出新的、合理的机构。
该装置的优点在于:装置所占用的空间小,而且升降高度的精度较高,适合用于安装空间较小、精度要求高、但高度调整范围不需要很大的场合。经过试验,文中所介绍的装置是完全可行的,为设备自动化中的升降提供了一种新型方法。
[1]吴敏,朱天宇,许强.一种自动卷环装置的设计[J].机械制造与自动化,2012(6):184-186.
[2]韩松岩.机械结构创新设计的分析[J].中小企业管理与科技(上半月),2008(3):145 -146.
[3]罗家莉.产品结构设计的重要性及影响因素探析[J].包装工程,2009(6):127-129.
[4]濮良贵,纪名刚.机械设计[M].北京:高等教育出版社,2006.
[5]樊敦秋,崔希君,曹宇光.自升式平台齿轮齿条升降系统受力分析[J].石油矿场机械,2010(12):27-30.
[6]王成军.一种齿轮齿条自锁机构的设计[J].煤矿机械,2002(11):5-6.
[7]董成交.一种基于实例推理的机械结构的设计[J].科技信息,2010(14):762.
[8]范若琛,刘晓叙.机械产品绿色设计结构体系研究[J].机械管理开发,2011(3):43-44.
[9]徐慧勇.浅析机械结构设计中的创新设计[J].黑龙江科技信息,2010(30):46.
[10]范若琛,刘晓叙.机械产品绿色设计结构体系研究[J].机械管理开发,2011(3):43 -44.
[11]闻邦椿.机械设计手册[M].北京:机械工业出版社,2009.
