直升机电传飞行控制系统操纵装置发展分析
2015-02-24陈宇金
陈宇金
(中国直升机设计研究所,江西 景德镇 333001)
直升机电传飞行控制系统操纵装置发展分析
陈宇金
(中国直升机设计研究所,江西 景德镇 333001)
电传飞行控制系统是先进直升机的主要技术特征之一,与传统直升机飞行控制系统相比,其操纵装置经历了显著的发展变化。回顾了直升机电传飞行控制系统操纵装置美欧构型发展历程,在此基础上分析了其构型技术特点和发展趋势,提出了国内的发展思路。
直升机;电传飞控;操纵装置;发展
0 引言
直升机上通过机械传动链的方式,将飞行员的操纵指令传递到操纵面,从而实现飞行控制的目的的机构称为机械操纵系统,为了同引入直升机运动信息反馈的飞行控制系统相区别,此类无反馈的机械操纵系统称为常规飞行操纵系统。
直升机电传飞行控制系统,是指利用电气信号形式,通过电缆实现飞行员对直升机运动轨迹和姿态操纵的飞行控制系统。从上述定义我们可以看出:电传飞行控制系统是由电缆替代机械杆系从而建立操纵信号链的一种特定的飞行控制系统。为了实现自飞行员到直升机操纵面(一般指旋翼系统)的操纵链,必须首先将飞行员的操纵量,纵向、横向、总距和脚蹬的操纵位移或力变换为电气指令信号,然后再在直升机操纵面前,将该电气指令转换成作动机构的机械位移,从而达到操纵直升机操纵面,控制直升机航迹和姿态的目的。电传飞行控制系统利用其电气信号易于综合、校正和转换的便捷性,实际上是应用反馈控制原理而使飞行器运动成为被控参量的电气飞行控制系统。电传飞行控制系统的应用的意义在于:它对直升机设计方法所产生的影响,以及给直升机飞行方式带来的改变。电传飞行控制系统的电气信号传递特点,为主动控制技术和操纵方式的改变提供了物质基础。
本文就直升机电传飞行控制系统操纵装置的发展进行了分析,提出了我国直升机电传飞行控制系统操纵装置的发展思路。
1 操纵装置
操纵装置,也就是直升机座舱操纵机构。飞行员通过操纵操纵装置来获得预期的直升机加速度、速度和姿态,即控制直升机的运动。传统直升机操纵装置一般包括周期变距杆、总距杆和脚蹬,一系列的机械杆系从周期变距杆、总距杆和脚蹬操纵装置连接到主、尾桨叶或主、尾桨助力器,为了保证系统的鲁棒性、完整性和可靠性,该复杂机械系统比较重,而且需要频繁的人工检查和维护。
现代飞行控制系统已将旋翼桨叶铰链力矩载荷与操纵装置进行了隔离,使飞行员无法感受桨叶操纵力的大小,为此需用人感系统提供必要的“人工感觉”,来模拟飞行员操纵力与桨叶操纵面位置之间的动态反馈关系。
因此直升机操纵系统中传统操纵装置必须具备以下功能:
1) 传递飞行员操纵位移指令;
2) 提供杆力、杆位移感觉;
3) 提供要求的力-位移梯度;
4) 提供要求的启动力、空行程和迟滞特性;
5) 具有回中能力;
6) 具有操纵力配平能力。
“操纵装置”这个术语也有可能用别的术语代替,这可能出现在不同的文献之中,不同的术语也有可能代表有差异的构型或用途。总之,操纵装置是飞行员操纵输入开始的地方。
在电传飞行控制系统中,操纵装置是把飞行员的操纵位移转变为控制系统输入的动态环节。电传飞行控制系统操纵装置位移转换成电信号后进行传递,这就为操纵装置新构型提供了可能,操纵装置的功能也相应发生变化。主要的构型有:传统操纵装置加位移传感器,主动和被动电子操纵装置。
2 国外发展动向
20世纪60起,航空技术先进国家对电传飞行控制系统的技术研究逐步开展,其操纵装置的技术研究也同步进行。美国主要开展了“战术飞行器指导系统”(TAGS)、“重型运输直升机”(HLH)、“先进搜救直升机”(ASH)、“先进数字/光传控制系统”(ADOCS)、“倾转旋翼机计划”、“旋翼机机组系统概念机载试验室”(RASCAL)、“直升机主动控制技术”(HACT)等研究项目;加拿大主要的研究项目为NRC-205、NSRA等;德国、波音伏特公司获得了美国和加拿大政府联合投资的TAGS(战术飞行器指导系统)研究项目;法国有“海豚电传演示验证”项目。
波音伏特公司在1967年到1972年期间,首先在直升机上研制电传飞行控制系统,并在347型直升机上进行了试飞验证。1989年贝尔直升机公司与波音公司联合研制的V-22倾转旋翼机进行了试飞,该型机使用全数字式的三余度全权限电传飞行控制系统,这标志着旋翼机电传飞行控制系统开始了型号应用。1995年NH工业集团研制的NH-90中型通用直升机进行了试飞,该型机采用全数字式的四余度全权限电传飞行控制系统,这标志着完全应用于直升机的电传飞行控制系统开始了型号应用。随后,美国的RAH-66、S-92F、UH-60MU、CH-53K等型号均采用了电传飞行控制系统。除欧美国家外,日本、俄罗斯等国家也积极开展电传飞行控制系统技术研究。
在上述直升机电传飞行控制系统的技术研究中开展了电传座舱操纵装置研究。早期主要是传统操纵装置加位移传感器和围绕侧杆操纵装置的不同构型进行研究,该时期主要是研究被动操纵装置,研究成果主要应用型号为NH-90、RAH-66、S-92F。直升机电传飞行控制技术发展到目前,在操纵装置方面,开展了主动操纵装置技术研究,主要是为了提高操纵装置的能力,克服被动操纵装置的局限性,研究成果主要应用型号为UH-60MU、CH-53K。
2.1 美国
在20世纪70至80年代之间,美国操纵装置的研究主要集中在侧杆技术上。当时侧杆已陆续在其他航空器上开始了型号应用。1967年至1972年,“武装直升机控制系统”(TAGS)项目主要研究的(3+1)总距构型(两个数字表示操纵装置有两个杆,3是指一个杆实现3轴操纵的功能,1指的是一个杆实现1轴的功能,把总距标识在括号边上表示其中只有1轴的杆是总距通道,本文后面有类似的表达)的操纵装置,操纵装置包括一个侧杆和一个总距杆,侧杆包括纵向周期变距、横向周期变距和尾桨的操纵功能。1971年至1974年,“重型直升机”(HLH)项目主要研究了4轴构型的操纵装置,侧杆包括了4个轴纵向周期变距、横向周期变距、总距和脚蹬的操纵功能。1979年至1980年,“先进搜索直升机”(AHS)项目主要研究了2轴力感型周期变距侧杆构型。1981年至1985年,“先进数字/光传控制系统”(ADOCS)项目主要研究了4轴,(3+1)总距,(3+1)脚蹬,2+1+1多种构型。1984年至1985年,“倾转旋翼机计划”项目主要研究了(3+1)总距,2+1+1两种构型。研究集中于操纵装置的构型、控制律要求、人机功效和非正常情况下的安全性[1]。
美国陆军在2001年启动的“直升机主动控制技术”(HACT)项目开展了主动操纵装置相关的构型、性能要求等基础研究,并在“旋翼机机组系统概念机载试验室”(RASCAL)项目中进行飞行验证。
基于上述研究,美国开展了电传飞控系统操纵装置的型号相关应用。
2.1.1 V-22倾转旋翼机
20世纪80年代研发的V-22倾转旋翼机首先进行电传操纵装置的型号应用,当时由于缺乏在垂直/短距起降飞机上使用小位移侧杆操纵装置的经验,该型机上仍然采用常规的可配平的机械式驾驶舱操纵装置。驾驶员的每个通道操纵都由四个位移传感器转换成电信号后发送到飞行控制计算机和备份计算机。纵向、横向和航向的杆力梯度随发动机吊舱的转角变化而变化。总距/功率操纵的杆力由可调节的摩擦制动装置提供。每个操纵通道上都有一个并联舵机,起配平和自动驾驶作用。总距/功率摩擦装置在并联舵机主动工作时松开。每个操纵通道并联舵机上还有一个电磁制动器,当并联舵机不主动工作时用它来配平保持。驾驶舱操纵框图如图1所示[2]。
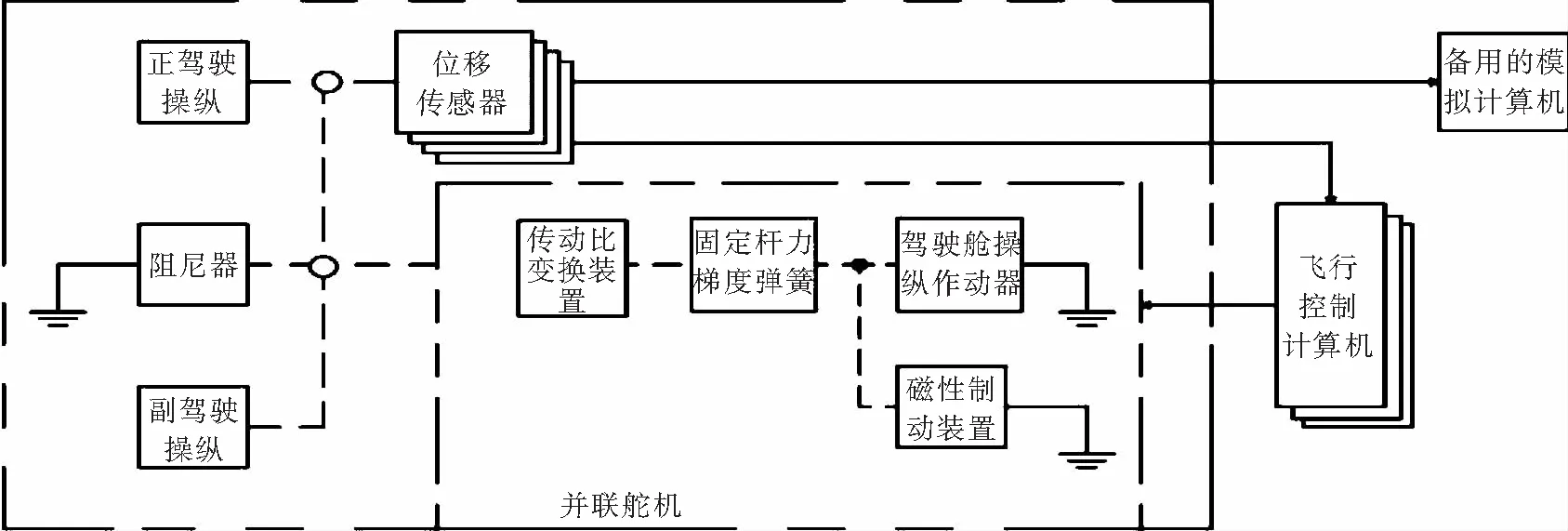
图1 V-22驾驶舱操纵框图
图2是总距/功率操纵通道的操纵装置,其他通道的操纵装置与之类似。这样的布置使得在出现断开时至少有一个驾驶员能操纵。所有的传动链路和力感装置在出现卡阻时都可以剪断而断开。如果力感装置断开,分离的阻尼器提供操纵感觉。各个通道都有串联配平功能以应对卡阻。当断开和外来物掉入时,交叉连接的设计使得卡阻的影响最小。第四个位移传感器作为备用而为主操纵系统所共用,这使得飞行员的操纵输入在机械和电气故障方面具有双故障工作能力。

图2 V-22总距/功率操纵装置
2.1.2 RAH-66“科曼奇”
20世纪90年代研发的RAH-66是美国第一种采用电传飞行控制系统的直升机。此时侧杆技术电传操纵装置研究已达到型号应用的水平,同时根据侦查、攻击、空战直升机的操纵特点,RAH-66采取了(3+1)总距的构型。RAH-66驾驶舱操纵布置图如图3所示。

图3 RAH-66驾驶舱操纵布置
串列式布局的每个驾驶员座舱包含一个右手唯一配平的被动电子侧杆,该操纵装置用于纵向、横向和航向的操纵,采用最小化的力梯度以降低飞行员在高工作负荷的情况下的疲劳,有足够的机械阻尼以防止振动耦合到控制系统之中,每个操纵轴具有一个三余度的线位移传感器。在高度保持模式下,该操纵装置还具有有限位移的总距操纵(垂直轴)能力。两个驾驶舱侧杆操纵装置之间没有机械连接,操纵不联动。针对这种操纵装置之间没有连接的布置,在乘员协调方面进行了大量的仿真评估,评估结果是采取双热配置。在操纵输入冲突时,飞行员会得到语音告警。
总距操纵输入通过总距杆实现。每个驾驶员座舱的总距杆各有个三余度转角位移传感器。不像侧杆操纵装置,总距杆之间有机械连接,总距操纵机械联动。为了应对弹击损伤,两个总距杆之间的机械连接具有剪断能力,以保证单个乘员能独立工作。此外,一个机电作动装置提供总距操纵的力感和反驱能力。反驱能力仅应用于高度保持模式。
能通过侧杆操纵装置手柄上的一个按钮来取消某一驾驶员座舱的电传飞控操纵功能。当一个驾驶员座舱功能取消,软件忽略该驾驶员座舱的侧杆和总距杆的所有操纵输入和按钮输入。采取这种策略的原因是:
1) 某一侧杆操纵装置出现机械损伤;
2) 侧杆操纵装置多重电子故障;
3) 总距操纵系统剪断;
4) 在按钮激活期间无意识输入。
通过转换评估表明,对于转换是采取固定时间周期还是固定速率方面,飞行员倾向于固定时间周期的解决方案。由于取消某一驾驶员座舱的功能是一个瞬间的转换(开关没有固定的开或者关的位置),开关状态存储在软件之中,同时必须在飞控计算机启动时相互之间细心管理[3]。
2.1.3 S-92F
21世纪初开始研制的S-92F是美国新一代采用电传飞行控制系统的直升机,该机已于2007年12月20日首飞。利用RAH-66上研制电传飞行控制系统的经验,在初步设计阶段采取了RAH-66类似的(3+1)总距的构型。随后经过大量的地面飞行员仿真试验并结合其它型号电传飞行控制系统的经验,考虑到座舱几何尺寸和重量因数,最终选择了更传统的2+1+1构型,即中央小位移被动式电子周期变距杆+大位移总距杆+小位移被动式电子脚蹬[4]。
总距轴操纵要求研究表明,比例位移操纵装置对S-92F来说是最好的选择,这是因为S-92固有的空气动力学特性使得其使用比例位移操纵装置时有很好的ADS-33总距操纵响应。这种类型的操纵装置能给飞行员提供飞行器性能状态的直接反馈,在达到性能极限以及起飞和着陆时,这一点非常重要。这样总距轴的相关部件用于提供人工感觉:摩擦,阻尼,外环配平,配平偏置梯度。正、副驾驶员总距杆之间机械联动,该部分的剪断设计类似RAH-66。总距操纵装置如4图所示。
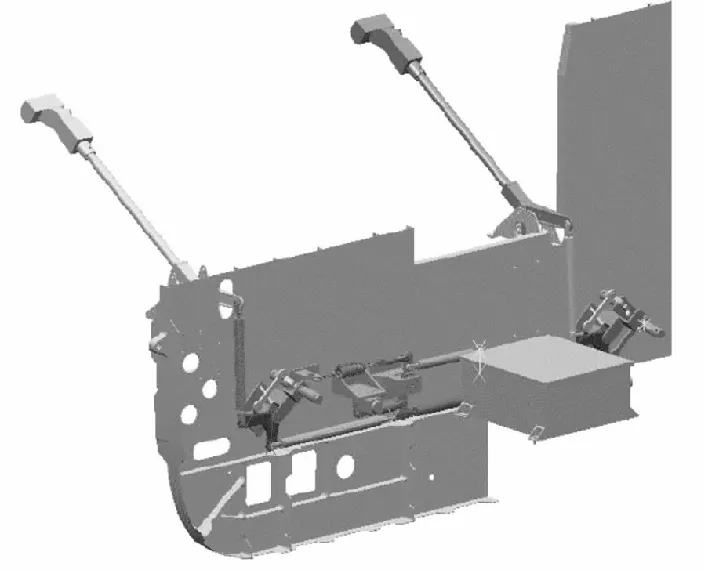
图4 S-92F总距操纵装置
在纵向和横向周期变距操纵上,S-92F曾经采用小位移唯一配平的操纵装置。该选择降低了操纵装置位移包线的要求,进而打开了使用侧杆操纵装置的可能性。S-92F最终没有选择侧杆操纵装置而采用其他构型是由于其采用了并列式的乘员布局。中央操纵装置布置与传统的周期变距杆类似,但是该操纵装置安装在一个小底座上,而且集成了一个可调装置,使得飞行员可以调节座椅位置以获得飞行器外部最佳的视野,同时移动操纵装置到一个飞行舒适位置。每个驾驶员舱位对应一个操纵装置,操纵装置使用集成弹簧梯度和液压阻尼器的轻质被动机械技术,正、副驾驶员之间周期变距操纵不联动。离开中心制动位置(唯一配平)的运动行程为±1.85英寸。周期变距操纵装置如图5所示。

图5 S-92F周期变距操纵装置
脚蹬操纵(航向)使用唯一配平脚蹬的原因同周期变距操纵。由于S-92F使用航向保持和自动协调转弯,航向轴操纵装置仅用于基本的悬停和低速转弯,或在直升机高速飞行时有意地侧滑。航向操纵使用脚蹬而不使用在RAH-66上应用的右手侧杆扭转是基于仿真研究。该研究表明在低速、多轴机动时,同样的性能情况下,使用脚蹬降低了工作负荷。S-92F脚蹬允许位置前后调节,而且就像传统配置那样集成了脚尖刹车功能。每个驾驶员舱位有一个脚蹬,与传统脚蹬在非电传S-92A上的一样,安装在地板同一位置上。从中间制动位置开始,运动行程为±1.25英寸。脚蹬组件是被动的,同时集成了一个弹簧装置和液压阻尼器,正、副驾驶员脚蹬操纵不联动。脚蹬操纵装置如图6所示。
2.1.4 UH-60MU
同样是21世纪初开始研制的UH-60MU是在UH-60M基础上改进升级的电传飞行控制系统试验机,该机已于2008年8月首飞。随着主动式电传飞行控制系统操纵装置技术的发展,该机采用了主动式传统杆(周期变距杆、总距杆)和被动式电子脚蹬,主动杆在该机型上的型号应用是直升机界的第一次使用,是历史性的突破。其中,主动式传统杆(周期变距杆、总距杆)包含机电式的高带宽、可变力感系统,给飞行员提供包括直升机状态、飞控系统模态、操纵限制等重要触感提示。主动式周期变距杆具有唯一配平位置,主动式总距杆具有多配平位置,被动式脚蹬具有唯一配平位置。高带宽力感系统使得两个驾驶员主动式传统杆(周期变距杆、总距杆)操纵装置能够通过电子连接而联动,被动式电子脚蹬操纵不联动[5]。主动式传统杆(周期变距杆、总距杆)操纵装置如图7、图8所示。

图6 S-92F脚蹬操纵装置

图7 UH-60MU主动式传统杆(周期变距杆、总距杆)
2.1.5 CH-53K“种马王”
新一代重型货运直升机CH-53K在2006年4月开始设计,2010年7月完成关键设计评审并进入试验样机制造阶段,预计2015年12月完成首飞。CH-53K采用唯一配平位置主动式右手侧杆(纵向和横向周期变距),多配平位置主动式总距杆,唯一配平位置被动式电子脚蹬。除了采用右手侧杆而不是中央杆外,其余配置或构型功能与UH-60MU一致。主动式杆(右手侧杆、总距杆)包含机电式的高带宽、可变力感系统,给飞行员提供包括直升机状态、飞控系统模态、操纵限制等重要触感提示。高带宽力感系统使得两个驾驶员主动式杆(右手侧杆、总距杆)操纵装置能够通过电子连接而联动,被动式脚蹬不联动。操纵装置(右手侧杆、总距杆、脚蹬)如9图所示。

图8 UH-60MU驾驶舱操纵装置布置

图9 CH-53K驾驶舱操纵装置布置
2.2 欧洲
在20世纪80年代,法国开展了电传飞行控制系统技术研究,并在“海豚”SA365N6001上进行了试飞验证。其中一项主要的研究是电传飞行控制系统人机接口研究,研究了传统中央杆、侧杆操纵装置与系统控制规则之间的关系。德国在1996年启动的“主动控制技术-直升机空中模拟机”(ACT-FHS)项目开展了一系列电传飞行控制系统技术研究,在该项目中对主动杆的相关技术进行了全面研究,并在德国宇航中心的EC135验证机上进行了充分的试飞验证。
欧洲研发的采用电传飞行控制系统的现役直升机仅有NH-90。该直升机1991年6月开始研制,1995年12月首飞,2004年进入批产阶段。NH-90采用传统的大位移中央周期变距杆、总距杆和脚蹬。正、副驾驶操纵装置之间机械联动。其中,每一操纵通道连接一台并联舵机,以提供杆力梯度、杆位置配平(自动配平和比普配平)、杆释放、透明操纵。机动飞行时,并联舵机按载荷因数来提高杆力、调节操纵装置的动态特性(通过并联舵机内部的摩擦和阻尼功能实现)。NH-90采用上述构型,主要是由于小位移操纵装置(含侧杆)适合于以响应类型为目标的脉冲型控制律,而且不能反映操纵面的位置,受限于当时小位移电子操纵装置的技术水平,无法体现接近飞行边界限制时飞行员的感知[5]。此外,基于当时欧洲直升机电传飞行控制系统的技术能力,NH-90电传飞行控制系统是四余度的,其中有一个余度是直接链余度,直接链通道的控制律设计使用小位移电子操纵装置时会降低飞行员的操纵精度,这也是不选择小位移电子操纵装置的原因之一。操纵装置(周期变距杆、总距杆、脚蹬)如图10所示。

图10 NH-90驾驶舱操纵装置布置
3 国外发展分析
早期电传飞行操纵系统操纵装置仅提供操纵位移电信号给飞控计算机。这种“被动式”操纵装置通常应用于当今的固定翼军用航空器上,比如F-22、“台风”,以及民用的波音和空客的客机上。在直升机领域,V-22、NH-90、RAH-66和S92-F上也使用该“被动”操纵装置。 “被动”操纵装置是指操纵装置没有主动、实时控制飞行员感觉特性或触感反馈。也就是说,操纵装置仅仅提供电信号给飞控计算机,任何触感或阻抗来源于被动的阻尼或弹簧。这种型式的好处是复杂性、重量和维护,这也是电传操纵系统操纵装置的最低要求。“被动”操纵装置在初期选择传统大位移操纵装置,操纵装置的操纵感觉与传统非电传直升机一样,应用的型号为V-22和NH-90。这样的选择与当时电传飞行控制系统的技术发展水平是适应的,特别是当时的操纵装置技术、控制律设计和余度技术的水平是适应的。随后因技术的发展,“被动”操纵装置出现了唯一配平位置小位移的构型,应用在RAH-66和S92-F上,其中选择中央式还是侧杆,(3+1)总距还是2+1+1,取决于直升机气动响应特性和驾驶舱布置。
双座直升机,两个飞行员之间的操纵装置需要联动,就像机械飞行操纵系统操纵装置一样。此外,飞行员希望提供操纵面的感觉反馈,这些是电传“被动”操纵装置所没有的。这导致了近期的电传操纵装置的革命,也就是出现了“主动”操纵装置。
“主动”操纵装置能够提供主动产生的、在操纵部位的静态和动态力感反馈给飞行员。力感是由可编程模型产生,该模型控制“主动”操纵装置内部的伺服电机。在静态层面上,模型决定任何操纵位移的力感水平。在动态层面上,模型决定阻尼、惯量和刚度等特性。此外,外部的传感器和指令也可以用于驱动“主动”操纵装置的控制模型。“主动”操纵装置的这些固有特性使得其具备模拟任何航空飞行器感觉特性的能力,在训练用航空飞行器上特别有用。“主动”操纵装置的潜在使用远远超过简单模拟感觉特性和全行程感觉特性的可编辑性。极为重要的是,特别是对于双座航空飞行器,有能力使得两个“主动” 操纵装置能够电气联动,就像他们之间有机械连接而操纵联动一样。这样消除了对应“被动”操纵装置之间的所需的机械安装和连接。
“主动”操纵装置涉及的飞行危险程度使得它们必须达到高的完整性、可靠性和安全性的等级。因此,作为电传操纵系统的一般设计理念,余度、交叉监控和故障失效管理同样适用于“主动”操纵装置。目前欧美所研制的“主动”操纵装置已具备与它们所替换的普通机械飞行操纵系统操纵装置同样安全级别的水平。这样得到的好处是,减轻了重量,减少了维护,提高了飞行员的状态感知能力。
“主动”操纵装置,能够提供主动产生的、在操纵部位的静态和动态力感反馈给飞行员。使用“主动”操纵装置,其中一个非常重要的好处是在杆上实现触觉提示系统,该系统能显著提高飞行员的包线限制感知能力,因此提高了航空器的操纵品质并降低飞行员的工作负担,同时允许飞行员“眼睛向外”。总之,如果飞行员在整个包线内使用该系统而降低工作负荷,可以使军用直升机的工作效率、可靠性和安全性得到提高。在2014年12月,多余度安全认证的“主动”操纵装置安装在CH-53K直升机上实现了首飞。
4 国内发展思路
先进的直升机电传飞行控制系统操纵装置能有效提升直升机的操纵品质。美欧对此进行了全面系统的研究,其中美国的研究和应用走在最前面,实现了主动操纵装置的型号应用。国内重点对电传飞行控制系统顶层设计技术、多模态轴间解耦控制律设计、舵机和飞控计算机等技术进行了研究,未对电传飞行控制系统操纵装置开展全面系统的研究和发展,因此积极推进该项技术研究就变得尤为必要和迫切。结合美国和欧洲操纵装置技术研究和发展特点,本文提出五点建议:
1) 研究操纵装置单座舱布置构型、参数与直升机操纵响应类型相互之间的关系
操纵装置单座舱布置构型应用较多的是2+1+1和(3+1)总距,其中2+1+1中的2(纵向和横向)可以是中央杆或侧杆,(3+1)总距构型中3一般为3轴侧杆。操纵装置参数主要包括位移、启动力、力梯度、自然频率、惯量和阻尼等。直升机的响应类型包括速度响应类型和姿态响应类型。对上述之间的关系进行充分的仿真和试验研究,积累相关经验和数据,制定技术规范,形成操纵装置参数、座舱布置构型定义能力。
2) 研究触感提示与直升机操纵限制相互之间的关系
操纵装置触感提示包括软限位、坡度力、制动、阻尼和抖动等。直升机操纵限制有扭矩功率限制、操纵过载限制、操纵范围限制和操纵速率限制等。需要研究哪一种类型触感提示匹配多大触感强度以最适用于某种操纵限制。合理有效的触感提示,一方面让飞行员能够得到充分有效的操纵限制提示以促进飞行员直升机状态感知能力,提高操纵安全和操纵品质;另一方面不得导致不适宜的握杆操纵负担和潜在的诱发振荡。
3) 研究双驾驶操纵装置之间的操纵协调
当两个驾驶舱位的操纵装置之间存在直接机械连接时,两个操纵装置之间的操纵协调就跟传统机械操纵系统一样。在使用被动式操纵装置时,两个驾驶舱位的操纵装置之间不存在机械联动,飞行员无法感知另一个飞行员操纵装置的操纵状态,就需要协调好两个操纵装置的操纵,制定正常情况下的协调使用规则,故障情况下的人工处置和自动切换逻辑。在使用主动式操纵装置时,两个操纵装置通过电气连接实现联动,当出现电气联动故障时,需要制定应急协调操纵规则。因此双驾驶操纵装置之间的操纵协调是保证直升机安全操纵的必需,需要研究制定相关规则。
4) 积极开展新一代操纵装置软硬件研究
操纵装置涉及的飞行危险程度使得它们必须达到高的完整性、可靠性和安全性的等级。制造出可供型号使用的新一代操纵装置,如小位移唯一配平位置侧杆或中央杆,不论是被动式,还是主动式,都必须满足相关的军用和民用安全标准。为了达到安全标准,余度、交叉监控和故障失效管理是必需的,操纵装置必须集成多余度的计算、作动和传感器,同时也必须在合适的重量、尺寸和成本之内。因此需要积极开展新一代操纵装置软硬件研究,提高软硬件技术成熟度。
5) 新一代操纵装置与新一代电传飞控系统控制律一起协调发展
操纵装置由大位移多配平位置向小位移唯一配平位置发展,是与电传飞行控制系统控制律的发展密不可分的,使用小位移唯一配平位置操纵装置时,电传飞行控制系统控制律必需采用全权限高速模型跟踪架构控制律。因此在进行新一代操纵装置研发时,也必须同时进行新一代电传飞控系统控制律的研发,两种技术一起进行仿真试验和飞行验证,共同发展。
5 结 语
随着直升机电传飞行控制系统技术的进步,操纵装置朝小型化、主动化的方向发展,极大扩展了飞行员操纵感知能力,降低了工作负荷,提高了操纵品质,也是新一代电传操纵系统的标志之一。我们国内直升机电传飞行控制系统的操纵装置技术水平与国际先进技术水平相比,差距是巨大的。我们应从被动式小位移唯一配平位置操纵装置入手,通过操纵装置的参数设计、飞行仿真模拟试验、演示验证试验、型号应用等的研究,突破新一代操纵装置座舱布置、参数定义、余度及故障管理技术,在飞控系统指令模型跟踪控制律设计技术的支持下,逐步朝主动操纵装置方向发展。
[1] 格林那 肯,著,高 正,等,译.直升机设计[M].南京:南京航空学院直升机技术研究所,1992.
[2] McManus B L. V-22 tiltrotor fly-by-wire flight control system[C].the 11th European Rotorcraft Forum, London, England, September 10-13, 1985.
[3] Boczar B, Borgstorm D W, Everett P T. Key aspects and attributes of the RAH-66 Comanche flight control system[C].the American Helicopter Society 55th Annual Forum, Montreal, Quebec, Canada, May 25-27, 1999.
[4] Stiles L, Knaust G, Wittmer K. The S-92 goes fly by wire…[C].the American Helicopter Society 64th Annual Forum, Montréal, Canada, April 29 - May 1, 2008.
[5] 徐尤松.直升机电传飞控技术的发展及其面临的挑战[J].国际航空,2012(9):72-75.
Development Analysis of the Inceptors for Helicopter’s Fly-By-Wire Control System
CHEN Yujin
(China Helicopter Research and Development Institute, Jingdezhen 333001,China)
The fly-by-wire Control System is one of the main technology features for the advanced helicopter. Compared with that of the conventional flight control system, the inceptors of the fly-by-wire Control System have been deeply developed and changed. This paper presented the status of the fly-by-wire Control System’s inceptors in North America and Europe. The technology and development trends of the inceptors were analyzed. The ideas of the development for the fly-by-wire Control System’s inceptors were discussed.
helicopter, fly-by-wire, inceptors, development
2015-04-02
陈宇金(1976-),男,江西赣州人,高级工程师,主要研究方向:直升机飞行操纵系统设计及预先研究。
1673-1220(2015)03-059-08
V249.1
A
