无人直升机系留试飞方法研究与应用
2015-02-24张采泉赵国辉
张采泉,赵国辉
(1.中航工业直升机所,江西 景德镇 333001;2.中国人民解放军65527部队,辽宁 沈阳 110100)
无人直升机系留试飞方法研究与应用
张采泉1,赵国辉2
(1.中航工业直升机所,江西 景德镇 333001;2.中国人民解放军65527部队,辽宁 沈阳 110100)
无人直升机试飞是验证无人直升机设计指标,检验质量和提高性能的重要手段。试飞是无人直升机系统研制和技术发展的关键环节,贯穿于飞行研究、新机设计、生产和使用的全过程。试飞工作具有高综合性、高复杂性和高风险性,是一项复杂的多学科系统工程。实现国内无人直升机加速发展的关键是突破飞控技术,而飞控技术的初期摸索就是在系留试飞的基础上进行的。对系留试飞现状进行分析和研究,分析了各类系留试飞方法,确定了一种适合飞控系统调参的系留试飞方法。
无人直升机;飞控系统;系留试飞
0 引言
无人直升机作为控制对象,其独特的旋翼系统导致气动特性和动力学特性远比固定翼飞机的复杂,因此无人直升机的研制是一项多学科、多系统集成的现代化高科技项目,其技术实现难度不言而喻。在研制无人直升机的过程中,我们希望地面飞行操作手操纵直升机的平衡、补偿、解耦等技术参数通过飞行控制系统准确地实现,这对无人直升机的建模技术和飞行控制律设计提出了更高的要求,也是实现无人直升机超视距自主飞行的关键技术之一。
尽管在过去的30年间各国一直进行无人直升机的技术开发和研制,但真正能交付使用的也只有几种型号,如美国的MQ-8B“火力侦察兵”等。大多数无人直升机的飞控技术是采用古典调参控制法,即用线性系统理论作为基础;少数几个型号,如奥地利的CAMCOPTER S-100等[1],采用现代调参控制法,如基于模型逆的显模型跟踪控制方法[2],使之具有与有人驾驶或遥控直升机相同的机动能力,并具有半自主/自主完成作战使命的开放平台系统。
国内近20年间也在不断进行无人直升机的技术研究,但关键的控制技术未能完全突破,飞控系统仍处于古典调参控制技术的研究和开发阶段,研制工作没能取得有效的进展。因此,国内无人直升机加速发展的关键是突破飞控技术。
由于新机体不可靠、飞控系统不完善,机上无飞行员试飞,地面飞行操作手不了解机体性能、不确定机体能否起飞,从机体安全、适合飞控系统调参以及人员安全这三方面来说,早期试飞必须对新机体进行一定的约束——系留试飞。
本文通过对比分析多种不同形式的系留试飞方法(主要分为滑橇式起落架和鳍式起落架系留试飞方法),并结合实际的系留试飞案例,确定出一种适合飞控系统调参的系留试飞方案。
1 系留试飞的目的
无人直升机系留试飞通常包括开环调整试飞和闭环调整试飞,其中闭环调整试飞包括姿态保持/控制调整试飞和位置保持调整试飞。
开环调整试飞未接入飞控闭环控制律,不将传感器测量出的控制结果反馈回来影响飞控系统,可以初步检验各系统的功能、协调性、工作稳定性和电磁兼容性,检验在飞控系统开环状态下无人直升机裸机的稳定性和操纵性,实现无人直升机在规定的飞行条件下安全完成首次离地悬停。
闭环调整试飞接入飞控闭环控制律,将传感器测量出的控制结果反馈回来影响飞控系统,在安全完成首次离地悬停后进行。姿态保持/控制调整试飞可以初步调整纵横向内环(姿态控制)和航向控制参数,使无人直升机可以稳定离地悬停,并可初步检验接入增稳或姿态控制后,无人直升机的稳定性和操纵性,实现无人直升机在规定的飞行条件下完成离地稳定悬停至少一分钟。位置保持调整试飞可以初步调整纵横向位置保持控制参数,进一步提升无人直升机的稳定性,让地面飞行操作手熟悉无人直升机对象特性,为不系留试飞提供安全保障。
系留试飞前的地面系留试验需要解决总距和发动机油门的协调关系等关键问题,但三轴姿态还未处于闭环控制状态,GPS和惯性导航装置还无法对飞行航迹进行修正与控制,定高也未接入闭环,系留试飞必须以地面飞行操作手目测操纵控制模式进行。在目测操纵控制模式下,操作手目测无人直升机的姿态变化,通过地面操纵控制盒(如图1所示的一种操纵设备)的总距杆和姿态操纵杆对无人直升机进行操纵和控制[3]。发动机起动后始终处于恒速闭环控制方式,在发动机功率能力范围内无论无人直升机旋翼需要多少功率,发动机电子控制器均可保证旋翼转速的恒定。

图1 操纵控制盒
2 系留试飞方法分析
本章节根据无人直升机起落架结构形式的不同分析各类系留试飞方法,有滑橇起落架式的1根钢索系留试飞方法和4根钢索系留试飞方法,以及鳍式起落架式系留试飞方法。
系留试飞前无人直升机全机需要完成发动机控制试验、电磁兼容、全机振动测试等多项地面试验,并完成相关检查测试,系统无机械、电气等故障。应选择风速较小、能见度较高的天气,周边无强电磁干扰、视野开阔、无高大障碍物的场地情况下进行,系留试飞时机体需安装保护装置,如试飞保护架等。
2.1 滑橇起落架式系留试飞方法
2.1.1 1根钢索系留试飞方法
该系留试飞系留装置由1根地面系留钢索、1根飞行系留钢索、2根滑橇系留钢索和试飞保护架等组成。将地面系留钢索固定于场地上2个不露出地面的紧固地桩上,再将2根滑橇系留钢索呈“X”形固定在滑橇上,之后给无人直升机安装试飞保护架,最后将飞行系留钢索与机上系留钢索“X”交点处紧固连接,另一端与地面系留钢索连接。具体布置如图2和图3所示。

图2 1根钢索系留试飞方法示意俯视图

图3 1根钢索系留试飞方法示意主视图
优点:该系留试飞方法寻找前俯后仰和左右横滚的平衡点仅受1根钢索限制,操作手可在较大范围内操作,且该方式允许机体有一定的前后左右及上下高度的位置偏差,允许钢索有一定的扭转载荷。
缺点:该系留试飞方法载荷易在2根滑橇系留钢索上放大,飞行系留钢索强度应小于滑橇系留钢索强度,利于总距跳变时对机体的断开放飞,并且拽回机体时姿态不易通过1根绷紧的系留钢索控制。若需要在总距跳变时拽回机体,则必须选用强度较大的飞行系留钢索,且滑橇上必须安装试飞保护架,避免拽回机体时侧翻等情况的发生。
2.1.2 4根钢索系留试飞方法
该系留试飞系留装置由4根飞行系留钢索和试飞保护架等组成。将飞行系留钢索固定于场地上4个不露出地面的紧固地桩上,再将4根飞行系留钢索另一端与4处滑橇横向与纵向交叉处固定,之后给无人直升机安装试飞保护架。具体布置如图4和图5所示。

图4 4根钢索系留试飞方法示意俯视图
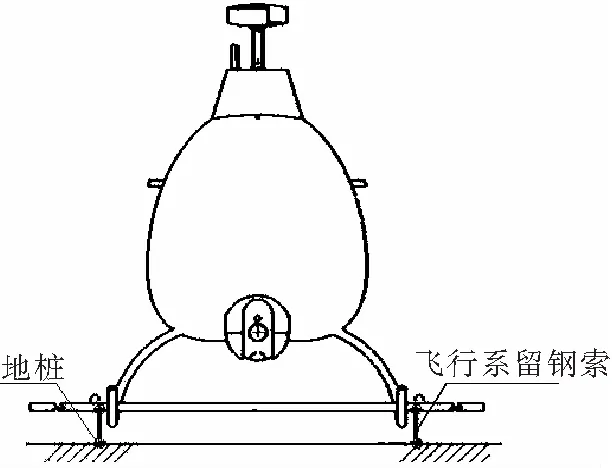
图5 4根钢索系留试飞方法示意主视图
优点:该系留试飞方法在拽回机体时姿态易通过4根绷紧的飞行系留钢索控制,利于总距跳变时对机体的拽回,适于共轴双桨无人直升机的系留试飞。
缺点:该系留试飞方法寻找前俯后仰和左右横滚的平衡点受4根钢索的限制,且该方式不允许机体有较大的前后左右和上下高度的位置偏差,也不允许钢索上有较大的扭转载荷,对操作手的水平要求过于严格。
需要特别注意的是,滑橇起落架式起降过程中滑橇跨距是变化的,试飞保护架横向保护杆一侧紧固在保护架接头上,另一侧必须处于可滑动的状态。并且带阻尼器的滑橇起落架式无人直升机由于阻尼器主要承受压力,不能承受过大拉力,在系留试飞时必须限制阻尼器的拉伸行程,避免阻尼器损坏。
2.2 鳍式起落架式系留试飞方法
鳍式起落架式无人直升机由于起落架结构原因,无法安装试飞保护架,而机体载荷舱部分承载能力有限,不能将系留装置固定于载荷舱处。该起落架形式无人直升机系留测试装置由多根系留棘轮绑带、1套机身固定装置和系留测试台架组成。先通过棘轮绑带将中心绑扎桥与中部机身相连,将尾绑扎桥与尾部机身相连,最后通过棘轮绑带将绑扎桥与系留测试台架相连。具体布置如图6所示。

图6 鳍式起落架式系留测试方法示意侧视图
缺点:该系留测试方法使用棘轮绑带等承拉、承扭程度低的连接装置来避免钢索等损坏机体,且机体几乎不可离开测试台架,测试的项目有限。
3 系留试飞方法应用
3.1 滑橇起落架式系留试飞方法
1根钢索系留试飞方法操作手可控范围较大,总距跳变时既有钢索断开放飞架次,也有带试飞保护架拽回架次,机体受损较小。某型无人直升机系留试飞如图7所示,姿态曲线如图8所示。

图7 某型无人直升机系留试飞
4根钢系留试飞方法在北航“蜜蜂”无人直升机以及某型无人直升机早期系留试飞时使用到。实际试验试飞时,操作手的控制受4根钢索限制严重,总距跳变时4根钢索绷紧,能自动拽住机体。北航“蜜蜂”无人直升机系留试飞如图9所示,某型无人直升机姿态曲线如图10所示。

图8 某型无人直升机1根钢索系留试飞方法姿态参数曲线

图9 北航“蜜蜂”无人直升机系留试飞

图10 某型无人直升机4根钢索系留试飞方法姿态参数曲线
3.2 鳍式起落架式系留试飞方法
奥地利CAMCOPTER S-100无人直升机采用鳍式起落架式系留测试方法,主要用于测试该无人直升机的性能。对于舰船操作,使用系留测试配套元件,通过舰船结构上的索具将无人直升机与舰船的飞行甲板牢固连接。地面系留测试则使用一套台架替代舰船的飞行甲板。
对比某型无人直升机1根钢索系留试飞方法和4根钢索系留试飞方法的姿态参数曲线,4根钢索系留试飞方法之机体逐步从被1根钢索限制到被2根钢索限制,直至被4根钢索限制达到平衡状态时,机体姿态趋于稳定,各姿态角最终在一个小范围内波动,机体姿态完全被4根钢索限制住,几乎不需要操作手介入操作。使用1根钢索系留试飞方法能够减少不利于飞控调参的钢索的过渡限制因素,且利于操作手熟悉新研和新生产机体,便于机体的调试。因此在初期飞控摸索阶段的系留试飞,操作手在熟悉该机体的操作后,为保证机体拽回的安全,适合使用4根钢系留试飞方法;在飞控相对成熟阶段的系留试飞,或者飞控在类似机体的移植,且操作手完全不熟悉无人直升机的操作的情况下,适合使用1根钢索系留试飞方法。
系留试飞从4根钢索系留试飞方法过渡到1根钢索系留试飞方法已应用到某型无人直升机上,在某演示验证无人直升机等机体上,由于飞控相对成熟,直接使用1根钢索系留试飞方法。
4 结束语
无人直升机的各种系留试飞方法对应各种不同起落架结构形式,各有优缺点。随着无人直升机的飞行性能越来越高,系统组成越来越复杂,其试飞风险也越来越高,因此系留试飞也成为无人直升机试验试飞的重要环节。通过系留试飞可以验证无人直升机系统的设计,并发现问题,在不断改进和完善的过程中,实现无人直升机整体性能优化和可靠性的逐步提高。本文有关系留试飞方法的研究将为后期试验试飞工作提供保障,并通过分析解决后期系留试飞遇到的问题进行完善。
[1] 王 海,徐国华.无人驾驶直升机的研究现状和发展趋势[J].直升机技术,2003(2) :45-49.
[2] 龚华军,江 驹.基于逆控制和模糊逻辑的直升机飞控系统设计[J].飞行力学,2004,22(3):43-46.
[3] 蒋新桐,郭才根,王道波.发展中的LE-110无人驾驶直升机[C]. 全国直升机年会论文,2003:37-41.
Research and Application on Unmanned Helicopter’s Mooring Flight Methods
ZHANG Caiquan1, ZHAO Guohui2
(1.China Helicopter Research and Development Institute, Jingdezhen 333001, China;2.The Unit No.65527of the Chinese People’s Liberation Army, Shenyang 110100, China)
Unmanned helicopter flight test is the important means for verifying the design index of unmanned helicopter, inspecting quality and improving performance. Flight test is the critical link for researching unmanned helicopter system, developing unmanned helicopter technology, it goes through the whole process of flight research, new helicopter design, production, development and operation. Flight test has the nature of high integration, high complexity and high risk, and it is a systematic engineering which is complicated multi-subjects. Breaching flight control technology is the key to speedup unmanned helicopter’s development, and grope of flight control in initial stage is based on mooring test-fly. This paper analyzed and researched actuality of mooring test-fly, analyzed various methods of mooring test-fly, confirmed a sort of mooring fest-fly method that adapting flight control system to debug.
unmanned helicopter;flight control system;mooring fly test
2015-05-04
张采泉(1989-),男,福建周宁人,大学本科,助理工程师,主要研究方向:无人直升机综合保障。
1673-1220(2015)03-054-05
V217
A
