无人直升机舰面自动起飞控制技术研究
2015-02-24单俊杰赖水清
鲜 勇,单俊杰,赖水清
(1.海装武汉局,湖北 武汉市 430064;2.中国直升机设计研究所,江西 景德镇 333001)
无人直升机舰面自动起飞控制技术研究
鲜 勇1,单俊杰1,赖水清2
(1.海装武汉局,湖北 武汉市 430064;2.中国直升机设计研究所,江西 景德镇 333001)
针对无人直升机舰面自动起飞的特点和需求,研究舰面自动起飞控制策略,设计舰面自动起飞轨迹控制,并通过仿真试验进行验证。
无人直升机;舰面自动起飞
0 引言
无人直升机不需要复杂的起飞与降落辅助设备,特别适合舰面起降,具有其它无人飞行器无可比拟的优势。国内军用及民用舰船对配备无人直升机的需求越来越多,主要用于执行海上侦察、反潜、监视、测绘和勘探等任务。无人直升机的海上使用首先需要解决舰面自动起降控制技术,其意义主要体现在以下几个方面:
1) 舰面自动起降是无人直升机海上使用的关键,该功能的实现可扩大无人直升机海上使用的范围;
2) 可降低舰船对无人直升机操作手的要求,克服无人直升机飞行中人的因素;
3) 可用于无人直升机的夜间与能见度差时的舰面自动起降,大大扩展无人直升机的使用时间范围;
4) 可有效地避免人员伤亡,节约成本,降低无人直升机海上使用风险。
与陆地自动起降相比,无人直升机舰面自动起降难度大大增加,主要原因如下:
1) 舰船随风浪摇摆和升沉。由于海上的风浪条件恶劣,整个舰船船体的运动复杂,主要为六自由度的平移与转动:纵荡、横荡、垂荡(升沉)、纵摇、横摇和摇艏运动,其中对无人直升机的自动起降影响较大的为纵摇、横摇与升沉运动。
2) 舰面气流紊乱。直升机的旋翼诱导下洗气流与舰面的建筑结构以及甲板的海面侧的流场复杂,此外由于风浪引起的舰体复杂运动也会造成舰面的气流紊乱。
3) 海面气象瞬息多变。远洋航行的多变气象威胁无人直升机的起降安全,无人直升机在执行任务前可能风平浪静,执行任务后却波涛汹涌、狂风暴雨。
因此,如何安全、鲁棒地实现自动起降是舰载无人直升机飞行控制系统的关键。本文针对无人直升机舰面自动起飞控制进行设计与仿真验证。
1 舰面自动起飞控制策略设计
无人直升机舰面自动起飞过程具体可以分为两个阶段:一是由舰面至脱离地效区的安全高度;二是由安全高度稳定爬升至悬停高度。其中需要解决三个关键问题:
1) 无人直升机离开舰面的时机选择
由于舰面运动的复杂性,无人直升机舰面起飞过程较为困难,需要判断可以起飞的时机。甲板运动时无人直升机起飞会叠加运动,通常甲板运动分为平移与转动,应尽量避免在甲板转动时起飞。在复杂海浪运动与大风环境下,甲板的转动通常可以分解为各种频率与振幅的正弦波叠加,通过判断,在甲板振荡零位时起飞,尽可能地缓解甲板转动对无人直升机自动起飞的不利影响。如果无人直升机起飞时叠加着甲板的平移速度,因为甲板的平移速度可以限制,对其影响不大,通过带速度反馈的位置控制,可消除起飞后的平移速度。
2) 离开舰面时总距不确定性问题
无人直升机的高度控制是通过总距操纵实现的。总距的大小决定了旋翼升力的大小,然而在离开舰面时总距的不确定将会影响离舰的安全性,所以要保证离舰时的适应性,需要采用总距前馈控制、高度反馈控制、时间约束保护/补偿以及高度判断等手段综合处置。
3) 起飞过程两个阶段的衔接问题
无人直升机舰面自动起飞分为两个阶段,需要实现第一阶段与第二阶段的衔接平滑过渡,主要体现在速度的平滑和总距量平滑,即离地时总距通道前馈量的门限以及反馈通道的控制方式。
国外有些先进无人直升机已成功实现舰面自动起降,图1、图2分别为“S-100”及“火力侦察兵”无人直升机舰面自动起飞试验。

图1 “S-100”舰面自动起飞

图2 “火力侦察兵”舰面自动起飞
参考国外无人直升机舰面自动起飞控制技术[1],将舰面自动起飞设计为一个完整的模态。控制策略流程图见图3。具体控制策略如下:
1) 起飞准备,发动机达到额定转速,进行静息期判断,满足条件后接入速度保持和姿态保持,同时给定纵向周期变距,保证无人直升机离开舰面时与舰船速度保持同步;
2) 无人直升机以一定的速度增加配平总距,在增加总距的过程中,当高度大于设定值,表明无人直升机即将离地,此时高度通道接通升降速率反馈,进入下一步;
3) 无人直升机继续以一定的速率增加配平总距,若高度大于另一设定值,表明无人直升机离地,接入高度反馈,并且停止增加配平总距,进入下一步;
4) 无人直升机向上爬升,当达到悬停高度完成稳定悬停后,自动起飞模态完毕。

图3 无人直升机舰面自动起飞控制策略流程图
2 舰面自动起飞控制指令设计
无人直升机舰面自动起飞接通条件是总距达到额定转速,并判断出起飞时刻舰船处于静息期内;结束条件是达到悬停高度并完成稳定悬停。飞行轨迹设计如图4所示。

图4 无人直升机舰面自动起飞飞行轨迹
相应的控制指令设计如图5-图8所示。
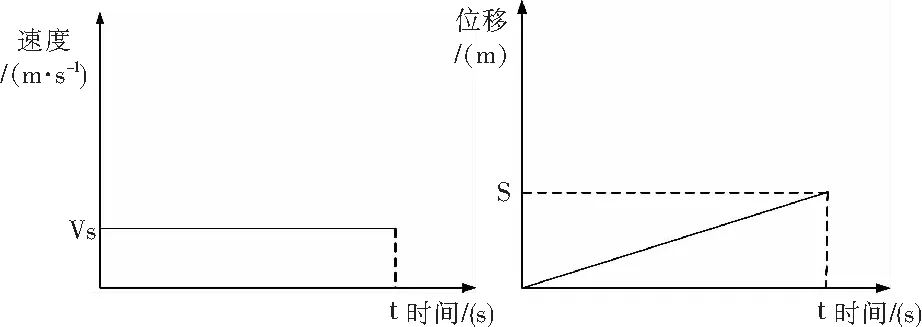
图5 纵向速度控制指令 图6 纵向位移控制指令

图7 垂直速度控制指令 图8 高度控制指令
3 控制律仿真
在MATLAB环境下对舰面自动起飞控制律设计[2]进行仿真,分别设定垂直加速度为0.5m/s2和1m/s2,垂直爬升速度为1m/s、2m/s和3m/s,进行6种情况下的仿真。仿真结果表明控制律设计满足指标要求(图9-图12)。

图9 舰面自动起飞控制律仿真曲线1
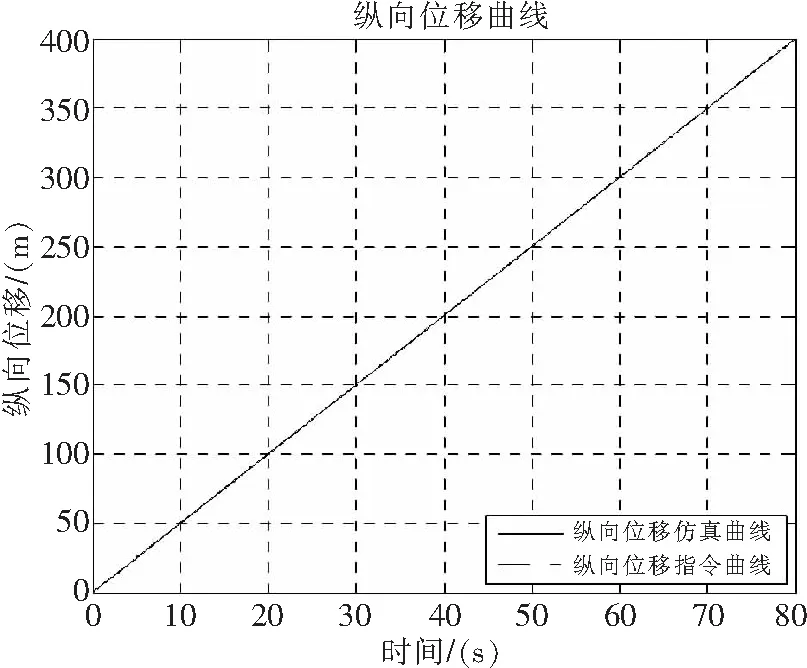
图10 舰面自动起飞控制律仿真曲线2
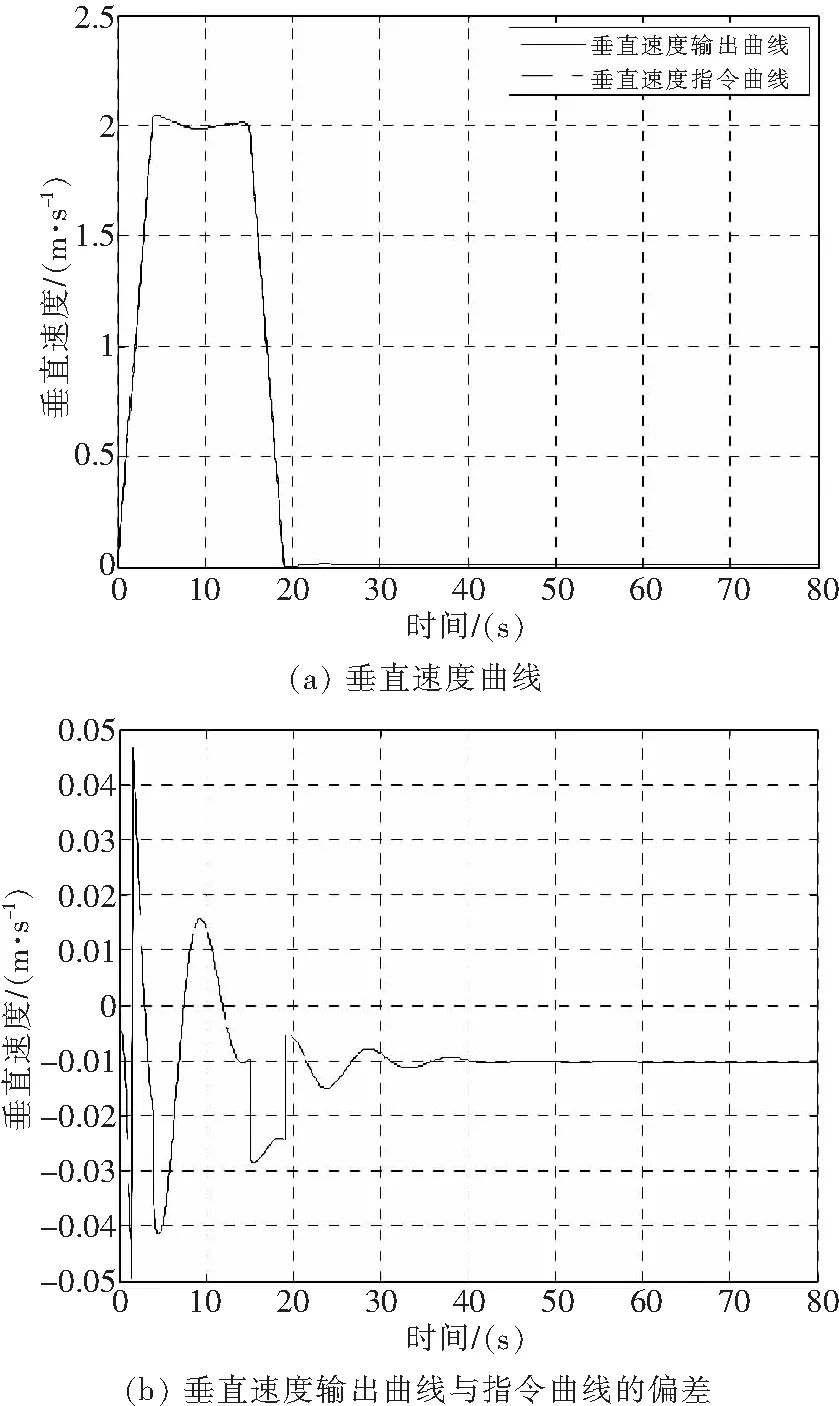
图11 舰面自动起飞控制律仿真曲线3
4 半物理仿真试验
以飞控计算机为核心,在半实物环境下对舰面自动起飞进行模拟试验,分别对舰船不同航行速度和不同海况进行了仿真,试验结果如图13-图16所示。

图12 舰面自动起飞控制律仿真曲线4
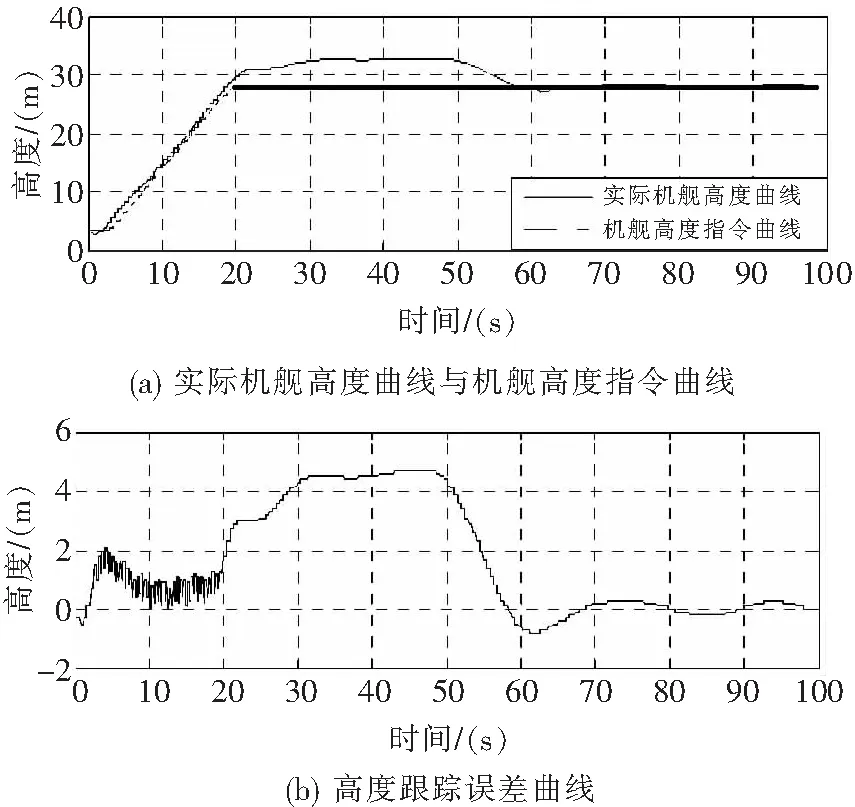
图13 舰面自动起飞半物理仿真曲线1
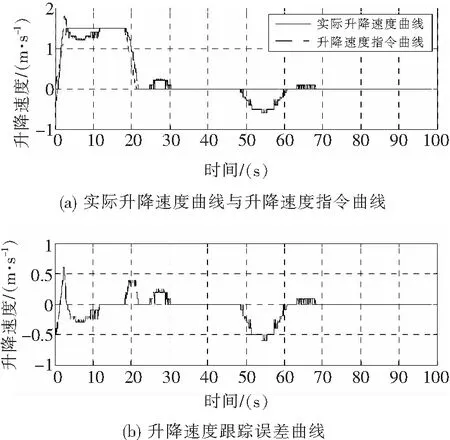
图14 舰面自动起飞半物理仿真曲线2

图15 舰面自动起飞半物理仿真曲线3

图16 舰面自动起飞半物理仿真曲线4
5 结 论
通过半物理仿真试验结果分析,并与控制律数字仿真结果进行对比,表明半物理仿真结果和控制律数字仿真结果一致,验证了舰面自动起飞控制设计满足要求。
[1] Elliott S, Jor W. Autonomous landing system for a UAV[R].ADA422364,2004.
[2] 薛定宇.反馈控制系统设计与分析[M].北京:清华大学出版社,2000.
Control Technique Research of Automatic Carrier Takeoff for Unmanned Helicopter
XIAN Yong1,SHAN Junjie1,LAI Shuiqing2
(1.Wuhan Military Representative Bureau of Navy Equipment Department, Wuhan 430064, China;2.China Helicopter Research and Development Institute, Jingdezhen 333001, China)
This paper aimed at the characteristics and requirements of automatic carrier takeoff for unmanned helicopter, the control strategy of unmanned helicopter automatic carrier takeoff was researched, then the design of automatic carrier takeoff track control was developed, finally the control strategy of automatic carrier takeoff was validated by simulation.
unmanned helicopter; autonomous carrier takeoff
2014-12-17
鲜 勇(1974-),男,四川巴中人,硕士,工程师,研究方向无人直升机。
1673-1220(2015)01-029-05
V249.12; V279
A
