高速公路平直路段安全跟车距离分析
2015-02-23张祝安刘兴茂
张祝安 刘兴茂
(贵州省公路局 贵阳 550003)
高速公路平直路段安全跟车距离分析
张祝安刘兴茂
(贵州省公路局贵阳550003)
摘要跟车距离是影响跟车安全性的重要因素。过小的跟车间距是导致追尾事故的原因之一。本研究从分析安全跟车距离的影响因素出发,通过实地观测获取真实跟车车流数据,分析观测路段车头间距的分布和车头间距与速度的关系,发现跟车间距随速度变化而波动,且跟车速度与间距同时影响跟车安全性。
关键词跟车行驶车头间距速度
跟车状态下车头间距的变化规律是车辆跟驰理论研究的重要内容之一,足够的车头间距能让后车驾驶员有足够的时间感知并安全地通过减速避免发生追尾碰撞。在高速公路上,高速行进车辆间因跟车间距把握不准、控制不当导致的追尾事故已成为近几年我国高速公路交通事故的主要形态之一,其数量占我国高速公路交通事故总量的40%左右[1]。经分析,导致这类事故产生的原因主要在于车辆行驶速度过高,同时驾驶员又未能保持相应的安全行车间距。
1安全跟车距离的影响因素与分析
最佳安全跟车距离, 决定制动停车距离的长短, 其数值的大小, 由汽车运行的速度高低、气候、道路的好坏、驾驶员反应的快慢和汽车制动的技术状态等因素综合分析累计而成[2-4]。
1.1 驾驶员反应过程
(1) 反应时间。从驾驶员发现前车紧急停车到制动启动的这段时间为驾驶员对前车状态做出的反应时间。驾驶员制动停车见图1。
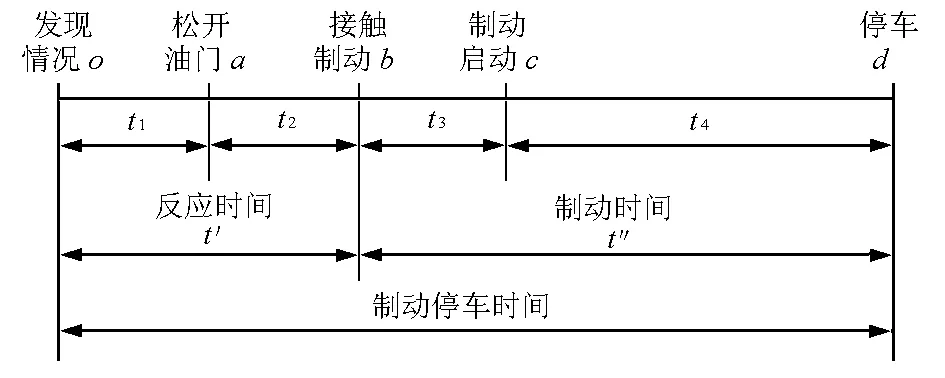
图1 制动停车时间轴
以t1表示松油门所需时间: 从o点到a点;以t2表示踩着制动所需时间: 从a点到b点, 则反应时间t′=t1+t2, 它取决于驾驶员反应的灵敏度, 操作技术的熟练程度, 还与驾驶员的年龄、体力等因素有关, 根据多次测定, 反应时间为1~2 s, 其数据的选择因人而定。
(2) 反应距离S1。假定驾驶员在对前方车辆紧急制动做出反应的这段时间内保持匀速行驶,则此短时间内所行驶的距离可以近似为
S1=v1·t′
式中:v1为行车速度。
根据上式可以得到,驾驶员在1.5 s的反应时间内以不同速度行驶状态的的反应距离,见表1。
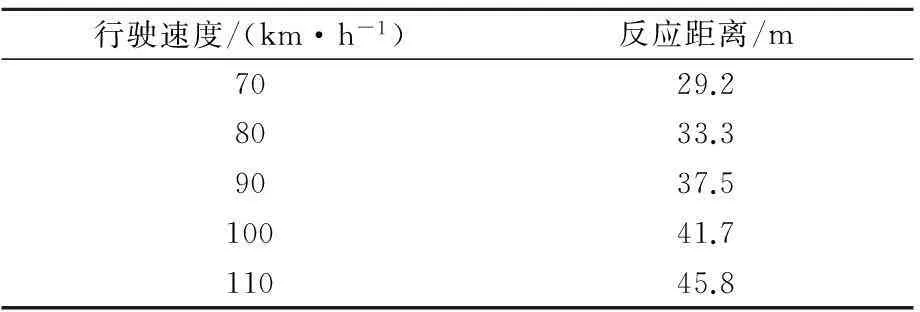
表1 不同速度下的反应距离
1.2 制动过程
(1) 制动时间t″。制动器反应时间t3,从踩下踏板到制动器开始起作用为止, 如图1中从b点到c点,由于制动的迟滞作用,要经过t3s后,制动器才开始起作用。
研究显示,液力传动的t3为0.2~0.25 s,气力传动的t3为0.3~0.9 s。
制动时间t4,制动开始到汽车完全停止,图1中从c点到d点, 则制动时间t″=t3+t4。
(2) 制动距离S2。根据有关资料分析,制动距离S2的长短与汽车的行驶速度的快慢、汽车在不同路况行驶时的地面附着系数等因素有关,其数值一般选用经验公式。
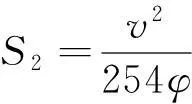
式中:φ为道路附着系数。
1.3 安全跟车距离数值的确定
从以上分析、计算得知, 制动停车距离S由驾驶员反应距离S1和车辆制动距离S2组成。根据在高速公路上常用的行驶速度, 可确定出最佳安全跟车距离,见表2。
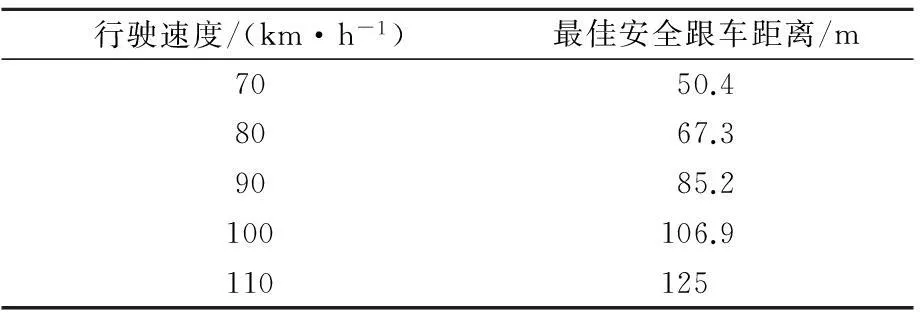
表2 不同速度下的安全跟车距离
2跟车距离的实测数据分析
2.1 试验地点
本试验选择在湖北省武汉市岱黄高速公路(编号:S1)进行。该高速公路为双向4车道道路,设计速度100 km/h,车道宽度3.75 m;路段年平均日交通量为18 061辆/d,且大型车占7.8%。本次试验的具体路段位于K6+900~K8+000之间,该路段为平直线路段。沿车辆行进方向,该路段上游连接一个900 m长的平直路段,下游连接一个半径为1 000 m的右转弯道。为了消除前后路段线性变化对行车的影响,本试验选择K6+900~K8+000中间的一段300 m区域来铺设边缘率标线。另外,整个试验区域范围内不存在任何暴露于驾驶员视野的违章抓拍监控等交通管理设备。
2.2 数据采集
实验中将6台Sony HDR-PJ510E型摄像机(每秒拍摄50帧1 920×1 080像素的画面)用三角支架架设在硬路肩防撞护栏外侧并拍摄车流视频(即每台摄像机对应一个观测断面,其布设见图2)。
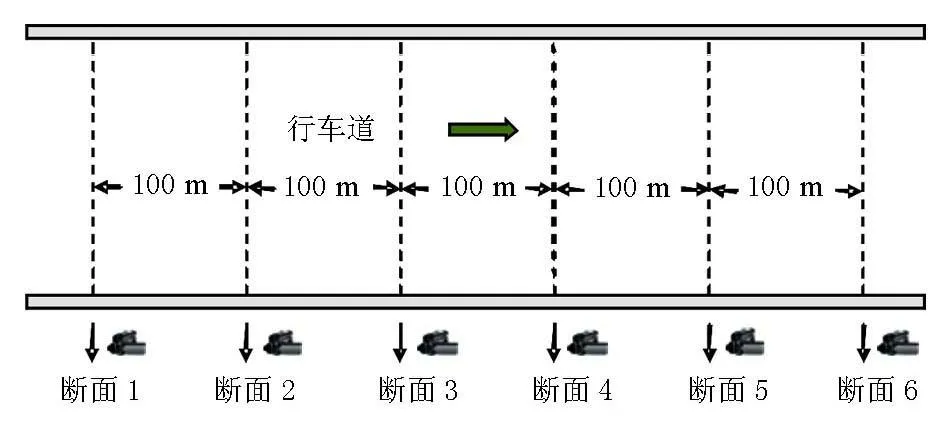
图2 摄像机布设位置示意
采集通过实验区域各个观测断面的车辆车速、车头时距,以及车辆类型。每次试验前,均采用6台摄像机同步设置。本次实验中所有数据均采集于上午8∶30~11∶30或下午14∶00~17∶00时段。
2.3 数据筛选
由于车辆在行驶过程中可能存在中途变道的情况,变道车辆非严格跟车车流,为了避免这种车辆影响,采取了视频画面识别的方法来排除这类车辆。视频画面识别的过程即为,通过观看6台摄像机所拍摄的6个断面的车辆通行情况,来检查是否存在中途变道的情形,如在任何一个断面出现变道,则将其数据从样本中剔除。
根据以上数据采集和筛选规则,共采集到有效车流参数数据492条。
2.4 试验结果
(1) 车头间距分布的总体特征。试验统计了各个车头间距情况下的车辆数,并给出各个间距区间对应的行车速度范围。具体跟车间距分布及其速度区间范围情况见图3。
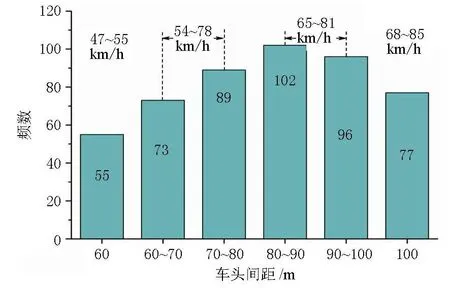
图3 车头间距分布
可以看出,观测路段跟车行驶的车辆中,40.2%的车辆的跟车间距在80~100 m的区间范围,44.1%的车辆的跟车间距在80 m以下,剩余15.7%的车辆的跟车间距则在100 m以上。同时,结合图2中显示的速度区间可以发现,车头间距集中的区域车速同样相对集中,且主要分布在60~70 km/h。结合最佳安全跟车距离来看,观测路段区域内,低速跟车行驶的车辆跟车间距较为合理、更为安全,相对而言,高速行驶的车辆则可能存在不安全的跟车行为。
(2) 区间车头间距变化特征。另外,根据跟车行驶车辆通过试验区域观测断面的情况来看,车头间距随断面存在一定的波动,且这种波动与各个断面处的行车速度较为一致,见图4。在车头间距最大的断面2处对应平均速度为69.3 km/h,而车头间距最小的断面6处对应的平均速度为68.9 km/h。这表明,控制行车速度对于保持较为安全的跟车间距具有一定的影响。
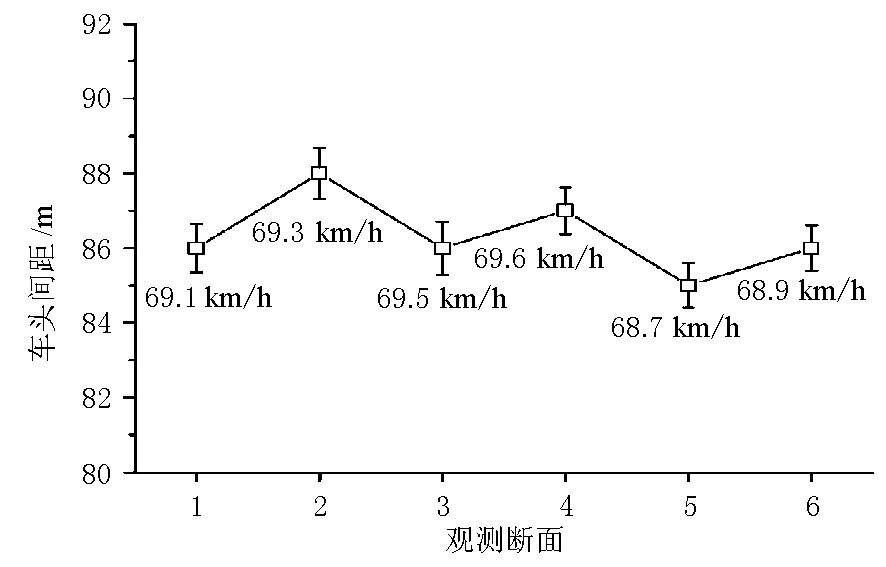
图4 各观测断面处的平均车头间距
3结语
跟车行驶是高速公路常见的运行状态,其安全性是整个高速公路运行安全畅通的关键。保持合理的跟车间距,对于安全行驶至关重要。跟车驾驶员行驶速度影响车头间距的大小,并与车头间距共同影响跟车安全性。因此,后车驾驶员在改变跟车速度时,把车头间距调整到合适的水平,以适应跟车速度的变化,将有利于保持跟车安全性。
参考文献
[1]公安部交管局.道路交通事故白皮书(2010)[Z].北京:公安部交管局,2011.
[2]张智勇,黄轶,任福田.稳定跟车状态车头间距分析方法[J].北京工业大学学报,2010,36(2):219-222.
[3]郑安文,张炳焕.高速公路不同跟车状态下安全行车间距分析[J].武汉科技大学学报:自然科学版,2003,26(1):54-57.
[4]张智勇,黄轶,任福田.加减速跟车状态车头间距研究[J].北京工业大学学报,2009,35(6):775-779.
收稿日期:2015-09-15
DOI 10.3963/j.issn.1671-7570.2015.06.044