脉振高频电压注入PMSM凸极特性实验检测研究
2015-02-23王志新林环城陆斌锋张超
王志新,林环城,陆斌锋,张超
(1.上海交通大学电子信息与电气工程学院,上海 200240;2.嘉兴清源电气科技有限公司,浙江嘉兴 314031;3.上海纳杰电气成套有限公司,上海 201111)
脉振高频电压注入PMSM凸极特性实验检测研究
王志新1,林环城1,陆斌锋2,张超3
(1.上海交通大学电子信息与电气工程学院,上海 200240;2.嘉兴清源电气科技有限公司,浙江嘉兴 314031;3.上海纳杰电气成套有限公司,上海 201111)
针对传统方法在研究永磁同步电机不同工作点下的凸极特性及分析其受交叉饱和效应影响的程度时通常采用耗时巨大的有限元仿真分析或复杂繁琐的实验方法的问题,提出了一种较为简便的永磁同步电机凸极特性实验检测方法。依据旋转坐标变换理论,通过向转子锁死的永磁同步电机注入脉振高频电压信号,解调高频响应电流信号,可以快速测得不同工作点下电机的凸极特性。通过对一台内置式永磁同步电机的实验研究验证了该方法的可行性,实验结果表明该方法能够准确检测不同工作状态下电机的凸极特性并分析由交叉饱和效应造成的交叉饱和角的大小。
永磁同步电机;无位置传感器;交叉饱和;脉振高频注入;凸极特性
0 引言
已有的如反电势法、模型参考自适应法、磁链观测器法等基于电机反电势的永磁同步电机(permanent magnet synchronous motor,PMSM)无位置传感器控制方法[1-2],在电机运行于低速或零速时,由于电机反电势很小或为零,其运行性能恶化甚至无法运行。基于高频信号注入的无位置传感器控制方法依靠电机的凸极特性,不依赖电机参数和反电势,可以在低速和零速下进行高精度的位置估算,因而具有独特的应用前景[3]。
高频信号注入的无位置传感器控制方法依据其注入信号和解调位置信息方式的不同可分为旋转高频注入法和脉振高频注入法两大类,但是两种方法实现的前提均是永磁同步电机具有凸极性[4-5]。电机在运行过程中,由于工作状态的变化和交叉饱和的影响,其自身的凸极特性会随之偏移,因而为了使高频信号注入的控制方法在不同工作状态运行时均具有较高的精度和良好的性能,需要对电机处工作点于不同下的凸极特性进行研究[6]。
永磁同步电机的凸极特性常以凸极率表征,其意义即为q轴增量电感与d轴增量电感的比值。因而通常为了了解不同工作状态下电机的凸极特性,需要知道对应工作点下电机d-q轴的增量电感[7]。一般通过有限元分析(FEA)或者实验检测的方法获得需要的电感值后进行分析[8-9],但是前者需要耗费大量时间进行仿真计算,且与实际特性仍可能有相当偏差,后者需要设计繁琐的实验进行研究。本文采用了一种简便的基于脉振高频信号注入的实验方法,可以检测不同工作点下永磁同步电机的凸极特性,并更为直观地用凸极特性圆加以表示,同时该方法还可检测不同工作点下交叉饱和效应对电机凸极偏移的影响。
1 考虑磁路耦合的PMSM电压方程
一般为了简化分析,通常假设永磁同步电机的d轴和q轴磁链是解耦的。但在实际的永磁同步电机结构中,存在由d-q轴磁路耦合导致的交叉饱和效应。因而当电机工作在不同的工作点时,电机的各个轴的电感不仅受自身磁链的影响,同时通过耦合的磁路受对方磁链的影响,最终使得电机的凸极特性改变。尤其是当负载电流增加,使得q轴电流增加,q轴磁链趋于饱和时,由于交叉饱和的作用使得q轴增量电感急剧下降,使得内置式永磁同步电机的凸极性变小甚至消失。
考虑到d-q轴磁路耦合带来的影响,高频激励下忽略电阻压降和旋转电势的影响,永磁同步电机的电压方程为[10]:

式中:v表示电压分量;i表示电流分量;L表示增量电感;下标d、q表示对应坐标轴,下标h表示高频分量。Ldqh、Lqdh为d-q轴高频互感,反映电机交、直轴交叉饱和的影响,二者近似相等。
2 永磁同步电机的凸极特性及检测参数
在估计de-qe轴注入高频电压信号,即向deqe轴注入式(2)的高频电压信号:
式中,上标e表示估计坐标系,Vi、ωi分别为注入电压信号的幅值和角频率,t表示时间。
将式(2)带入高频激励下的电机电压方程(1),可得对应的响应电流方程[11]:
其中θm为交叉饱和角,表征交叉饱和效应造成的凸极位置偏移特性。

图1 电压注入示意图Fig.1Voltage injection schematic diagram
根据以上分析,本文采用一种较为简便的方式直观检测不同工作点下永磁同步电机的凸极特性。其具体操作如图1所示,将电机转子锁定在电角度为零的位置,即将实际d轴固定,以逆时针为正方向,将估计的de轴以一定频率朝正方向作匀速周期性旋转,旋转一周即Δθ从0增加至2π,同时向de轴注入形如式(2)高频电压信号,从而可以得到形如式(3)的高频响应电流,对其乘以2sinωit后再通过低通滤波,便可得到它们的幅值信息:
从式(8)可以看出,对应的高频响应电流的幅值包含估计de轴旋转角速度的二倍频交流分量,该分量幅值In仅由注入电压信号和负序电感Ln决定,可以此表征永磁同步电机的凸极特性。
3 实验验证
根据前述理论,对一台内置式永磁同步电机进行了凸极特性实验检测研究。所采用电机为适用于洗衣机脱水工况的高速电机,其参数为:额定电压220 V、额定功率400 W、额定转速13500 r/min、额定转矩0.35 N·m,定子每相电阻1.2 Ω,q轴电感35 mH,d轴电感25 mH,极对数为2。
实验中以逆时针为正方向,将从三相静止坐标系变换到估计de-qe轴旋转坐标系的坐标变换矩阵的参考角度周期性(T=0.408 s)地从0均匀增加到360°,从而使估计的de轴以2.45 Hz的频率朝逆时针方向作匀速旋转,注入de轴高频电压信号频率为312.5 Hz,幅值为30 V,分别控制q(d)轴为0,在d(q)轴电流为0、±3A的工作点下测量了对应的高频电流响应。图2表示id=iq=0时未经处理的电机de-qe轴电流波形。
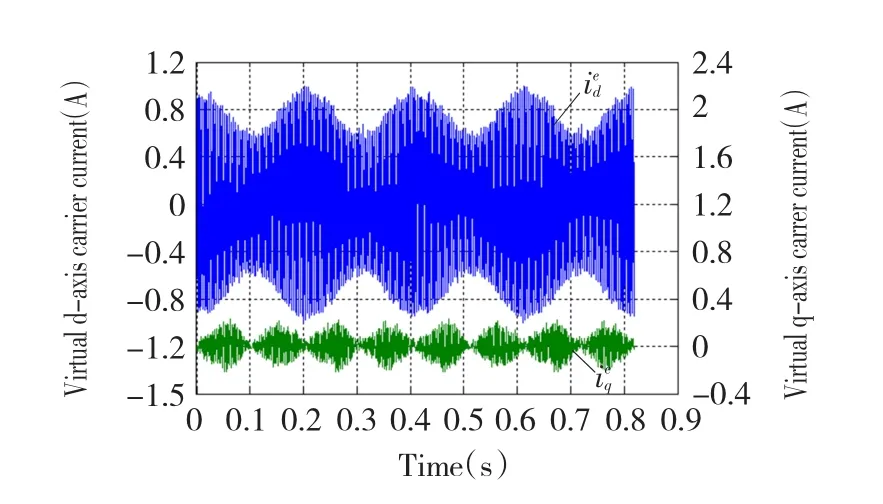
图2 de-qe轴电流(id=iq=0)Fig.2de-qeaxis current(id=iq=0)
将提取出的de-qe轴高频电流和对应的de轴角度同时绘出,得到了对应工作点在不同de轴角度下的高频响应电流幅值特性,同时将de-qe轴电流做李萨如图像可以得到对应工作点下的凸极特性圆,圆的面积和半径可以表征该工作点下凸极特性的显著程度。将图2所示电流处理得到的高频响应电流幅值特性和凸极特性圆分别如图3(a)和(b)所示。

图3 (a)电机de-qe轴高频响应电流(id=iq=0)Fig.3(a)de-qeaxis high-frequency response current(id=iq=0)
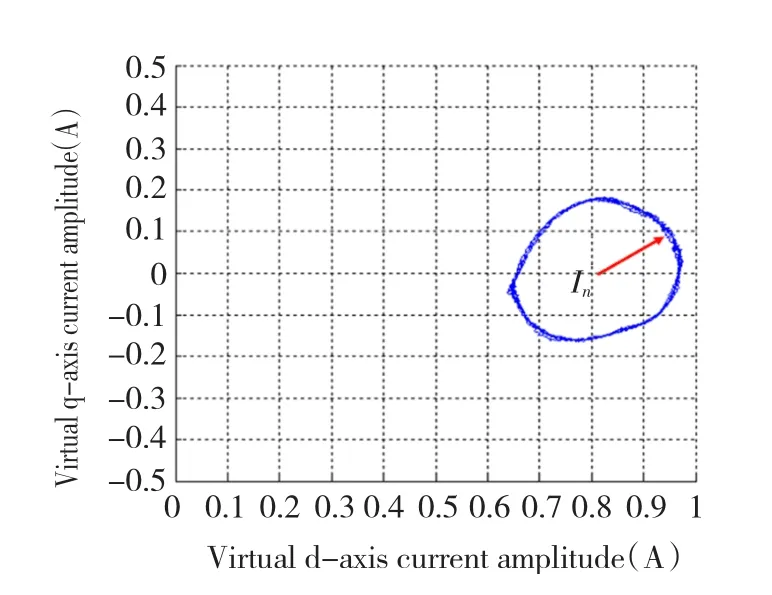
图3 (b)凸极特性圆(id=iq=0)Fig.3(b)Circle of salient characteristic(id=iq=0)
从实验结果可以看出,由于电机d轴上安置了永磁体,磁路本身处于较为饱和的状态,其电流变化对电机凸极特性的影响比q轴电流小。q轴电流增加时,不管正向还是负向,都使得q轴磁链增加,导致q轴趋于饱和,使得q轴增量电感下降,电机的凸极特性减弱,从而使得高频响应电流的幅值In下降。当In较小时,信号提取的信噪比下降使得信号提取难度增加。同时由于交叉饱和的作用q轴磁路饱和对d轴也产生影响,使得估计的凸极位置相对实际凸极位置即d轴产生θm/2的角度偏移,其偏移方向与q轴电流方向及电机具体磁路有关。当q轴电流较大时,交叉饱和的作用十分明显,交叉饱和角θm明显增大,这与理论分析相一致。
改变d-q轴电流,重复上述工作,得到不同工作点下的高频响应电流幅值特性和凸极特性圆如图4~图7所示。由于电机自身的非理想特性,如电机本体磁路结构不严格对称、不同工作点下局部磁路过于饱和等,造成高频响应电流的正弦度在不同工作点时有所畸变,同时凸极特性圆也一定程度偏离理想圆形。
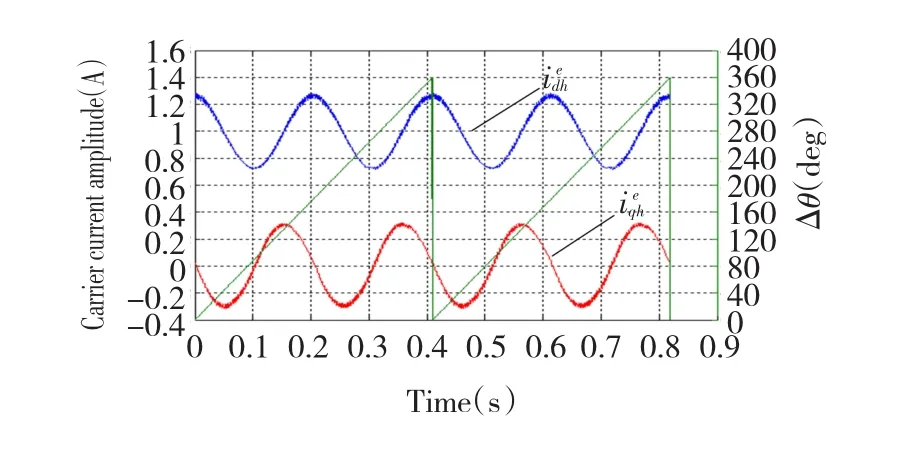
图4 (a)de-qe轴高频响应电流(id=3A、iq=0)Fig.4(a)de-qeaxis high-frequency response current(id=3A、iq=0)

图5 (a)de-qe轴高频响应电流(id=-3A、iq=0)Fig.5(a)de-qeaxis high-frequency response current(id=-3A、iq=0)

图6 (a)de-qe轴高频响应电流(id=0、iq=3A)Fig.6(a)de-qeaxis high-frequency response current(id=0、iq=3A)
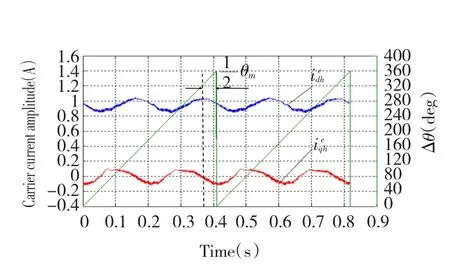
图7 (a)de-qe轴高频响应电流(id=0、iq=-3A)Fig.7(a)de-qeaxis high-frequency response current(id=0、iq=-3A)
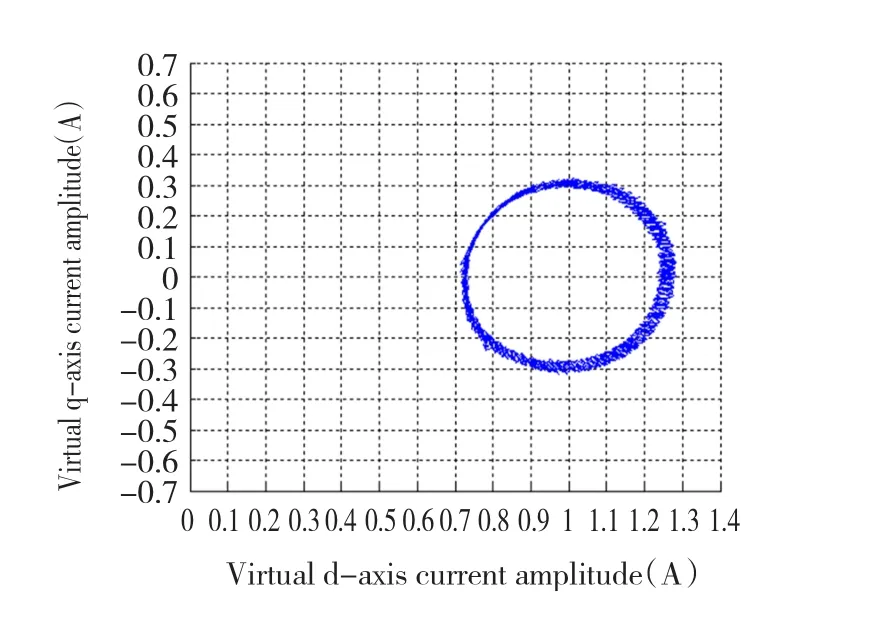
图4 (b)凸极特性圆(id=3A、iq=0)Fig.4(b)Circle of salient characteristic(id=3A、iq=0)
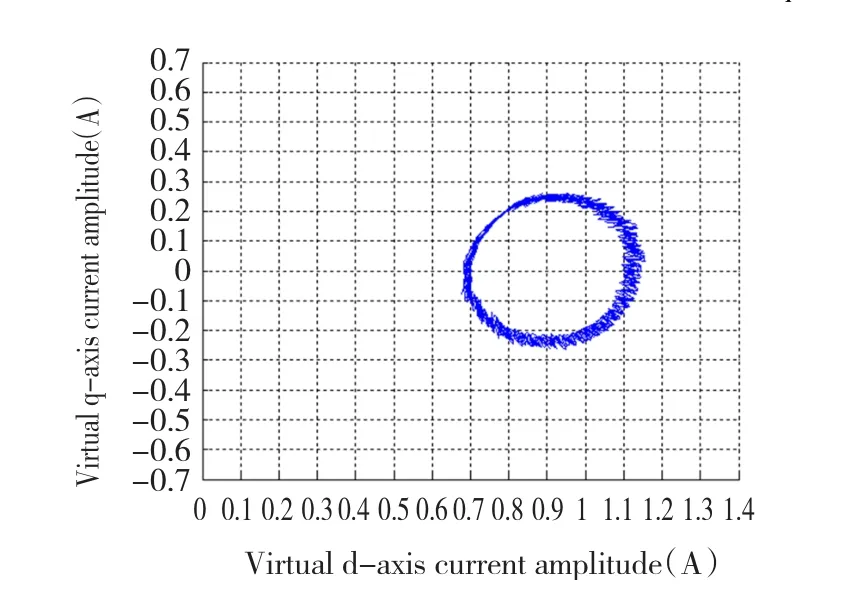
图5 (b)凸极特性圆(id=-3A、iq=0)Fig.5(b)Circle of salient characteristic(id=-3A、iq=0)
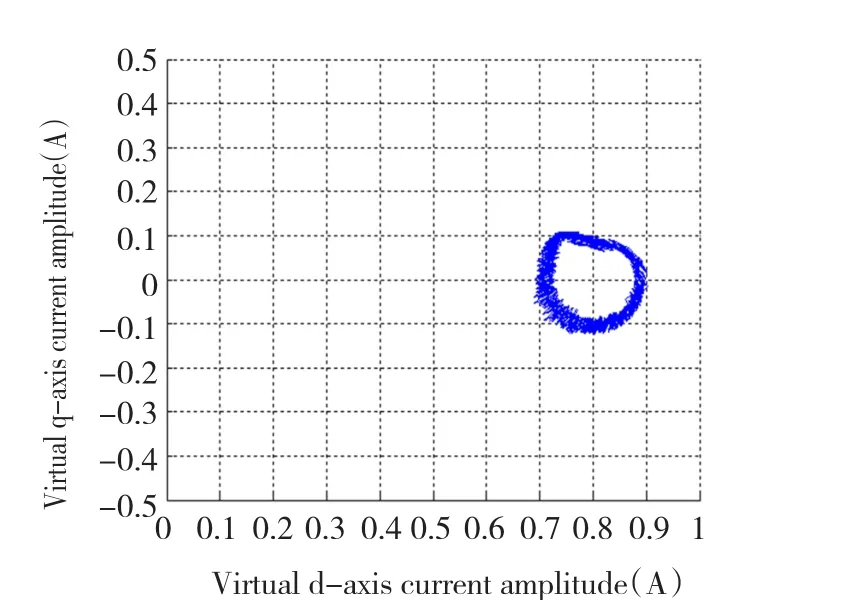
图6 (b)凸极特性圆(id=0、iq=3A)Fig.6(b)Circle of salient characteristic(id=0、iq=3A)

图7 (b)凸极特性圆(id=0、iq=-3A)Fig.7(b)Circle of salient characteristic(id=0、iq=-3A)
通过该实验,可对电机不同工作点进行凸极特性检测后,通过在线查表的方式对高频注入无位置传感器控制进行优化:按照凸极特性圆的大小调整注入高频信号的幅值,在保证足够信噪比的前提下降低注入高频谐波的影响;通过高频响应电流幅值特性的相位关系对估算位置中由交叉饱和角θm造成的误差进行实时补偿,提高估算精度。
4 结论
本文针对高频注入永磁同步电机无位置传感器控制方法需要了解电机在不同工作点下的凸极特性及其受交叉饱和效应影响的程度,设计了简捷的实验方法进行检测,避免了繁琐的实验操作和复杂耗时的仿真分析。经过对一台内置式永磁同步电机实验检测研究,表明该方法的快速性和有效性,可以有效检测电机不同状态下的凸极特性,从而为优化高频注入无位置传感器控制运行提供数据支持。
[1]刘家曦,李铁才,杨贵杰.永磁同步电机转子位置与速度预估[J].电机与控制学报,2009,13(5):690-694.
LIU Jiaxi,LI Tiecai,YANG Guijie.Rotor position and speed estmiation for PMSM[J].Electric Machines and Control,2009,13 (5):690-694.
[2]逄海萍,刘成菊,江姝妍.永磁同步电机交流伺服系统的滑模模糊控制.电机与控制学报,2006,10(6):576-579.
PANG Haiping,LIU Chengju,JIANG Shuyan.Sliding mode fuzzy control for permanent magnetic synchronous motor AC servo systems[J].Electric Machines and Control,2006,10(6):576-579.
[3]李永东,朱昊.永磁同步电机无速度传感器控制综述[J].中国电机工程学报,2009,39(9):3-10.
LI Yongdong,ZHU Hao.Overview of sensorless control of permanent magnet syncoronous motors[J].Proceedings of the CSEE,2009,39(9):3-10.
[4]JANG J H,SUL S K,HA J I,et al.Sensorless drive of surfacemounted permanent-magnet motor by high-frequency signal injection based on magnet saliency[J].IEEE Transactions on Industry Applications,2003,39(4):1031-1039.
[5]CORLEY M J,LORENZ R D.Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Transactions on Industry Applications,1998,34(4):784-789.
[6]石坚,汤宁平,谭超.永磁同步电机无位置传感器控制系统[J].电机与控制学报,2007,11(1):50-54.
SHI Jian,TANG Ningping,TAN Chao.New method for sensorless control technique of PMSM[J].Electric Machines and Control,2007,11(1):50-54.
[7]李和明,张健,罗应立.考虑交叉饱和影响的永磁同步电机稳态参数有限元分析[J].中国电机工程学报,2012,32 (12):104-110.
LI Heming,ZHANG Jian,LUO Yingli.Finite element analysis of PMSM steady state parameters considering cross-saturation effect[J].Proceedings of the CSEE,2012,32(12):104-110.
[8]LU K Y,LEI X,BLAABJERG F.Artificial inductance concept to compensate nonlinear inductance effects in the back EMF-based sensorless control method for PMSM[J].IEEE Transactions on Volume,2013,28(3):593-600.
[9]吴茂林,黄声华.永磁同步电机非线性参数辨识[J].电工技术学报,2009,24(8):65-68.
WU Maolin,HUANG Shenghua.Nonlinear parameters identification of PMSM[J].Transactions of China Electrotechnical Society,2009,24(8):65-68.
[10]景巍,谭国俊,叶宗彬.考虑磁场饱和效应的凸极同步电动机建模[J].电机与控制学报,2010,14(10):94-98.
JING Wei,TAN Guojun,YE Zongbin.Modeling of salient-pole synchronous motor considering saturation effect[J].Electric Machines and Control,2010,14(10):94-98.
[11]LIU J M,ZHU Z Q.Sensorless control strategy by square-waveform high-frequency pulsating signal injection into stationary reference frame[J].IEEE Journal of Volume,2014,2(2):171-180.
(编辑:张诗阁)
Experimental research of PMSM salient characteristic using pulsating high-frequency voltage injection
WANG Zhi-xin1,LIN Huan-cheng1,LU Bin-feng2,ZHANG Chao3
(1.School of Electronic Information and Electrical Engineering,Shanghai Jiao Tong University,Shanghai 200240,China;2.Jiaxing Renewable Power Electrical Co.,Ltd.,Jiaxing 314031,China; 3.Shanghai Najie Complete Electric Co.,Ltd,Shanghai 201111,China)
The salient characteristic of permanent magnet synchronous motor and the impact of cross-saturation effect under different operating states are usually attained by time-consuming finite element analysis or complex experiment.A simple experimental method was proposed to detect salient characteristic of permanent magnet synchronous motor.A pulsating high-frequency voltage signal was injected into a rotorlocked motor,and the salient characteristic was obtained by demodulating the high-frequency current response with rotating coordinate transformation.An experiment on an interior permanent magnet synchronous motor was carried out to verify the proposed method,and the experimental results show that this method can detect the salient characteristic of the motor under different working states accurately and analyze the cross-saturation angle caused by cross-saturation effect.
permanent magnet synchronous motor;sensorless;cross-saturation;pulsating high-frequency injection;salient characteristic
10.15938/j.emc.2015.03.004
TM 351
A
1007-449X(2015)03-0020-05
2014-04-12
国家自然科学基金(51377105);国家863计划项目(2014AA052005)
王志新(1964—),男,研究员,博士生导师,研究方向为电机控制、风力发电及光伏发电控制技术;
林环城(1991—),男,硕士研究生,研究方向为电机控制及海上风电变流器;
陆斌锋(1980—),男,博士后,讲师,研究方向为光伏检测和控制;
张超(1982—),男,工程师,研究方向为自动检测。
林环城
