智能辊闸系统温度影响问题处理
2015-02-23宋相龙蒋书波袁林成
宋相龙,蒋书波,袁林成
(南京工业大学自动化与电气工程学院,南京211816)
智能辊闸系统温度影响问题处理
宋相龙,蒋书波*,袁林成
(南京工业大学自动化与电气工程学院,南京211816)
摘要:智能辊闸系统在环境温度过高时,出现故障和无法使用情况。给出一种新解决方法,在传统的辊闸设备加入分段式模糊PI温控系统。通过采集电磁阀线圈温度,计算误差,选择调节方式。改变帕尔贴制冷片驱动电流,实现温控调节,并通过500次~6 000次实验测试,记录故障出现次数,从而验证此方法的优越性。
关键词:模糊控制;温度控制;制冷;电磁阀
辊闸系统广泛应用于公共场所,如游泳健身馆,车站,小区等。系统接受到正确的信号后,电磁阀打开,转动闸杆,实现人流通道的控制。辊闸的开关采用电磁阀控制(图1),电磁阀将电能转化为机械能,执行开闸操作。转换过程中线圈也伴随着一部分热量产生。长期使用,磁性变弱,导致无法正常工作。电磁阀磁场强度和电流关系可参考式(1),线圈的电阻和温度关系如式(2)。
式中:R1为线圈温度为T时线圈电阻,Ω; R0为周围介质温度为T0时线圈电阻,Ω; T0为周围介质温度,℃; T为线圈温度,℃; a为0℃时材料的电阻温度系数,1/℃。
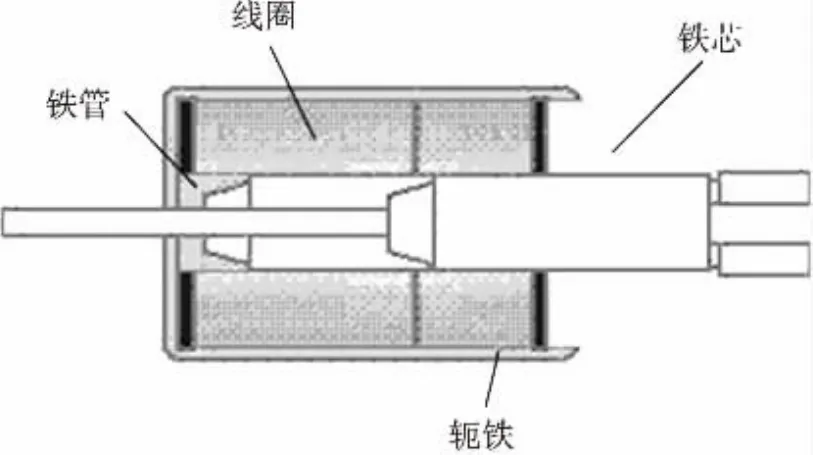
图1 电磁阀内部结构
根据式(1)和式(2)可以推导出在同一电压下的,磁场强度和温度变化关系,如式(3),根据公式可以得到磁场强度和温度变化如图2所示。
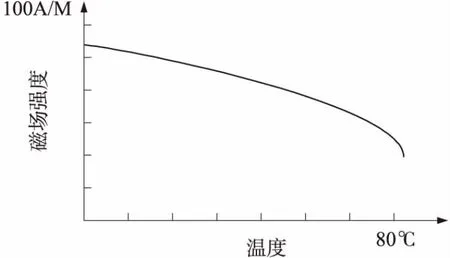
图2 磁场强度受温度影响
1 硬件结构设计
智能辊闸控制系统由闸机外壳,读卡器,辊闸控制板,LED显示屏,接近开关,电磁阀,棍杆机芯等组成。本文采用STC12C5A60S2作为微处理器,结构设计如图3所示。
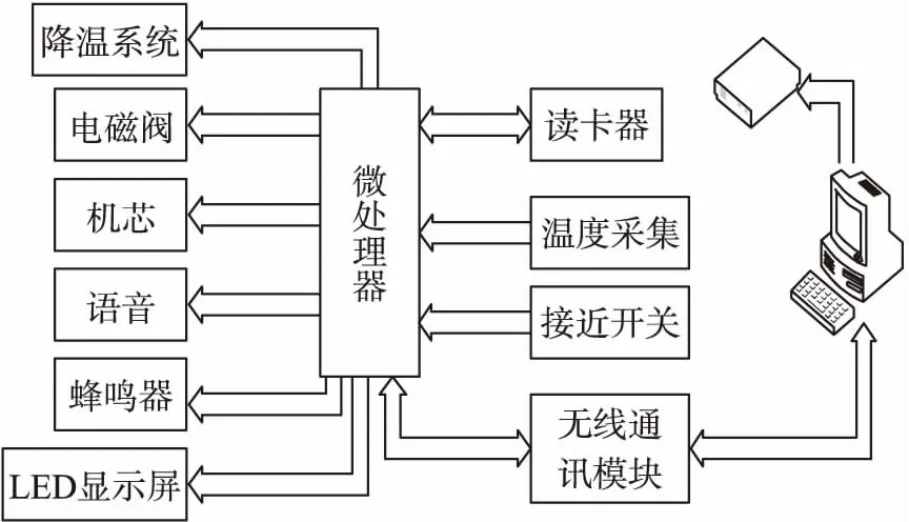
图3 系统框图
1.1温度信息采集
温度传感器采用美国Dallas半导体公司研发的数字化温度传感器,如图4所示。传感器采用不锈钢外壳封装,仅有0.15 mm的壁厚,具有很小的蓄热量。采用金属垫模工艺让温度传感器与不锈钢内壁充分接触,且用导热性高的密封胶灌封,保证了温度传感器的高灵敏性,极小的温度延迟[1]。比市场上常见的采用导热胶的工艺的传感器性能要好。
温度传感器直接固定在电磁阀线圈表面,系统每隔3 min读取温度一次。读取一次温度的时间大约在785 ms,不影响系统的正常工作。温度采集需外接上拉电阻4.7 kΩ限流。温度传感器传出信号DO,受环境影响较大,干扰频率信号较为严重。为了提高温度采集的精确度,温度采集电路设计采用模拟滤波器,由电容、电阻、运放组成巴特沃斯带通滤波器[2]。巴特沃斯带通滤波器幅频响应在通带中具有最平的幅度特性,缺点是从通带到阻带衰减较慢[3]。为了提高过渡带要求,增加滤波器阶数。将二阶低通滤波器和二阶高通滤波器组成四阶带通滤波器,分别将低频和高频干扰信号滤除,流程图参考图5。信号最终传入MCU的I/O端,控制器通过软件定时计算的方式,得到温度值。

图4 数字化温度传感器
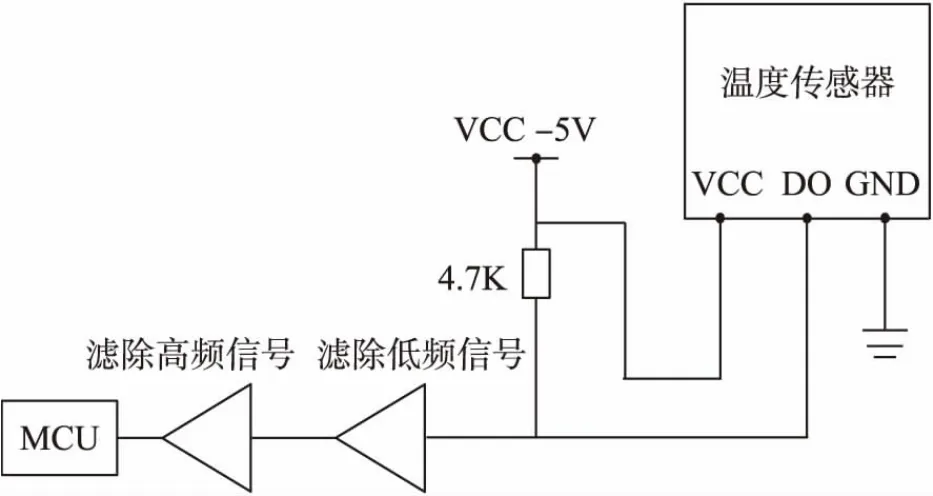
图5 温度采集电路
1.2降温处理
采用帕尔贴制冷片作为系统的降温装置,对空气无污染[4]。珀尔帖效应就是当电流通过热电偶时,冷端的热量被移到热端,达到散热和制冷效果,放热或吸热大小由电流的大小来决定[5]。为了实现改变电流大小,系统选择改变制冷片的电压。
帕尔贴制冷片的型号选为TEC1-12705,参数如表1所示。
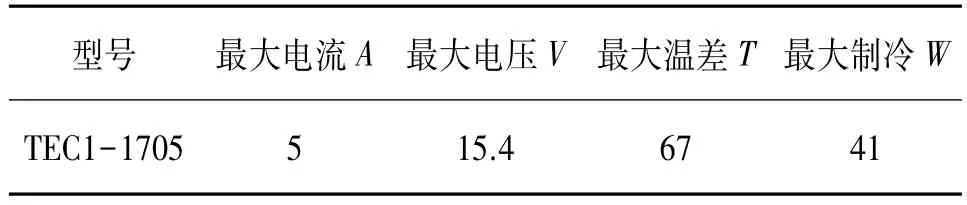
表1 TEC1-12705性能参数
系统通过单片机改变输出数据D,经DA转换调节输出电压大小,从而改变制冷片供电电流,调节吸热快慢。通过偏差大小选择制冷片的调节方式;若选择模糊控制,温度偏差较小,温度变化缓慢,出现故障概率小,温度采集时间不变。若选择PI调节,温度变化迅速,增大输出数据D,调高制冷强度,温度采集时间缩小,变为30s一次,逐渐将温度偏差减小到较小的区域。提高了系统的精确、响应。减小环境对制冷片调节的影响和系统调节自身产生的惯性、停滞。硬件结构设计参考图6。
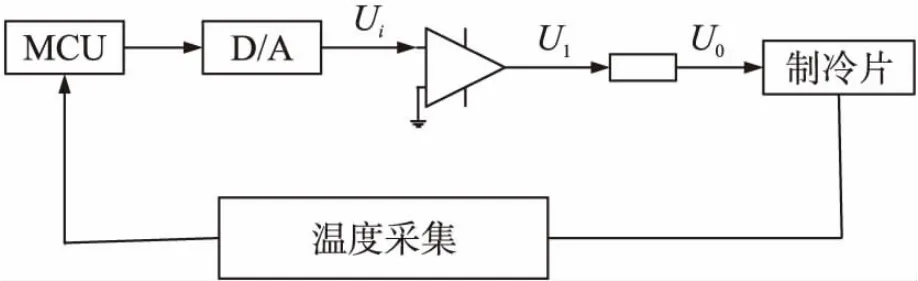
图6 降温电路设计
2 温度PI模糊控制
传统温度控制大多采用PID控制[6]。PID控制器的参数整定是控制系统设计的核心内容,根据被控过程的特性确定PID控制器的比例系数、积分时间和微分时间的大小。其结构设计简单,参数调整相对来说非常容易[5]。由于智能三辊闸系统温度控制具有大惯性,大滞后和时变性等特点,因而传统的PID不易更好的实现控制效果[7]。本文提出一种分段式PI模糊控制方法,可以大大提高控温稳定性和精确性[8]。
2.1模糊控制系统
控制器的表现形式为模糊控制系统与传统控制系统的区别。模糊控制系统包括被控对象,模糊控制器,检测和反馈,核心在于模糊控制器。模糊控制器包括模糊化、模糊推理、控制规则库、反模糊化4个部分,结构如图7所示。
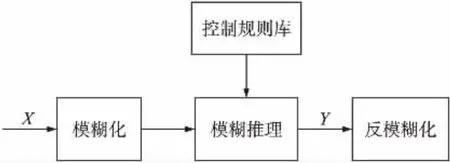
图7 模糊控制器结构
2.2温度PI-模糊控制器调节设计
智能辊闸系统的温度主要受外界环境的温度和人流量两大主要因素影响。系统开始时,线圈温度主要外界环境温度影响,温度变化缓慢,误差小,系统采用模糊控制,减小珀尔帖供电电压值,从而减小电流,制冷缓慢。当人流量过多时,电磁阀通断迅速,线圈温度迅速上升,误差变大,超出模糊控制误差范围,系统切换到PI控制,增大帕尔贴制冷片供电电压值,从而增大电流,迅速制冷,温度误差变小,控制在较小区域。温度控制如图8所示,系统结构设计如图9所示。
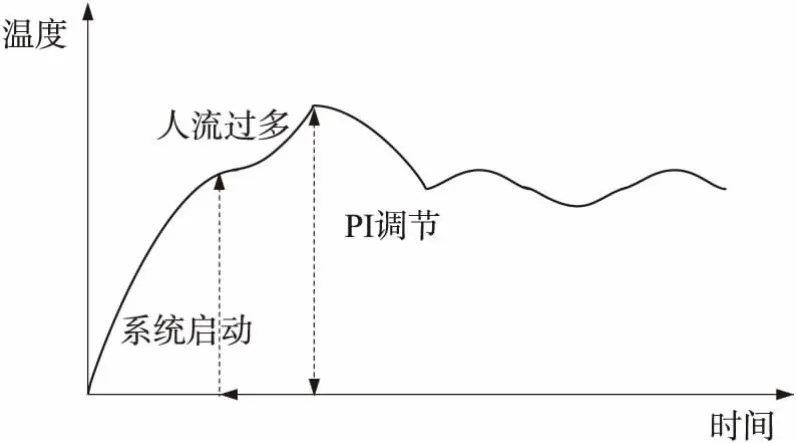
图8 控温曲线
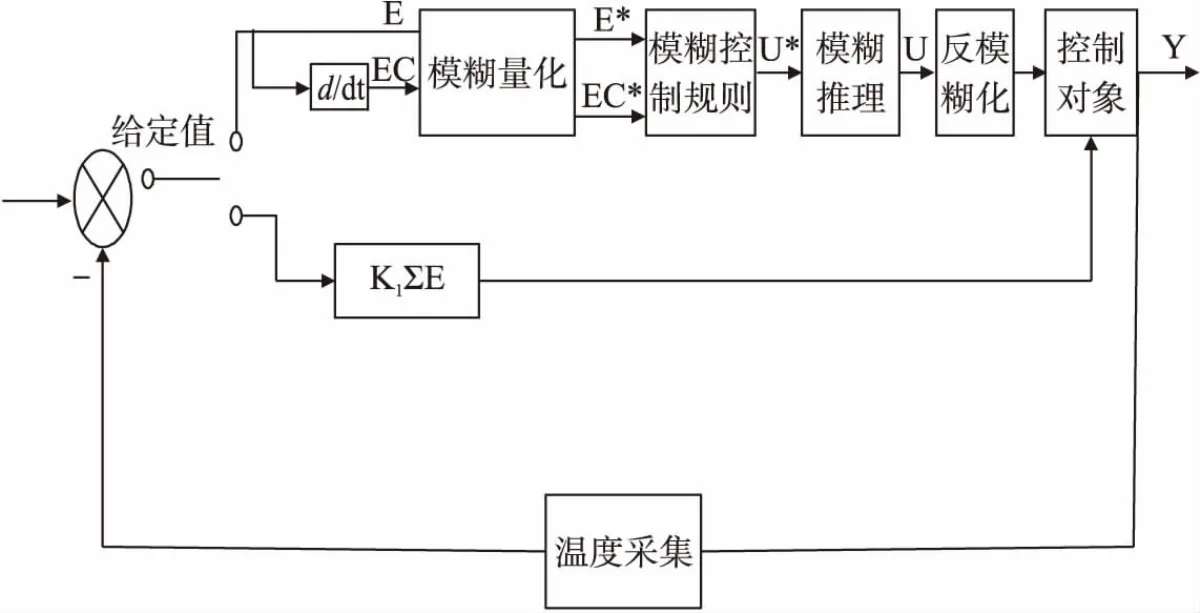
图9 温控系统结构设计
查找电磁阀的说明书,并通过数千次实验测试统计,电磁阀的温度处在25℃为最佳温度。参考表4温度控制测量结果,若电磁阀的温度上升到40℃,系统出现故障,35℃以下无故障。故选取25℃为给定的温度值。偏差|E|在10℃以内。0.5℃≤|E|≤5℃为模糊控制,5℃≤|E|为PI控制。为了提高精度,将细分温度偏差E为8个部分,PB、PM、PS、PZ、NZ、NS、NM、NB,量化区定义为:
E={-5,-4,-3,-2,-1,-0,0,1,2,3,4,5} ;
温度偏差变化率EC细分为PB、PM、PS、Z、NS、NM、NB。
EC={-5,-4,-3,-2,-1,0,1,2,3,4,5} ;
输出量U为:
U={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6} ;
U的值根据Mamdani推理方法,即为两个模糊集合的笛卡尔积求得。即

PI-模糊控温系统的输出控制增量ΔU有式(5)求得。

根据推理规则,反复测试,修改,得出模糊控制表如表2所示。
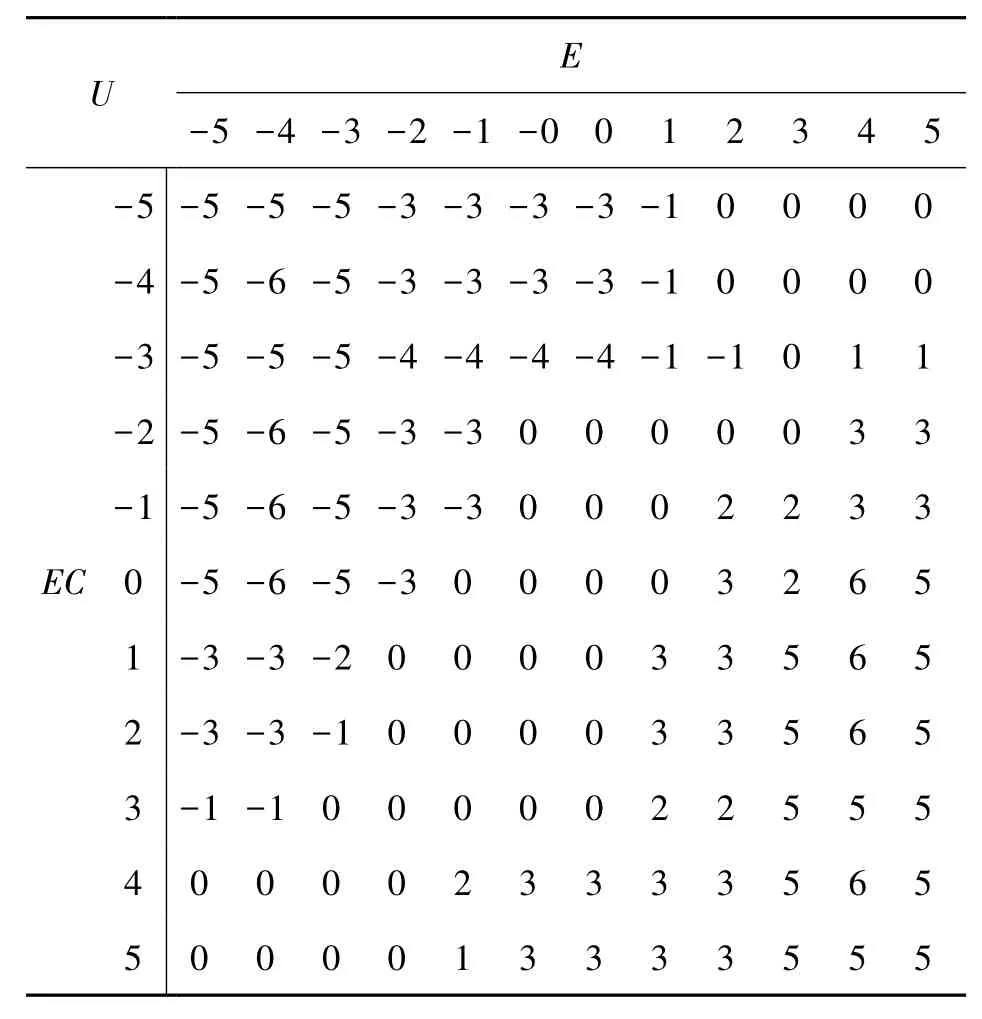
表2 模糊控制规则
程序算法是基于单片机基础上执行的,单片机细分4个存储空间,E0,E1,E2,E3。采样系统温度,查询控制规则表,计算调节量。选择调节方式,驱动外接硬件电路。具体参考流程图如图10所示。

图10 单片机模糊算法流程图
3 实验结果及分析
将两台相同型号的辊闸,一台加入温控调节,一台未加入温控调节,同时放在室外高温环境下,不停的刷卡测试。未加入温控调节的数据统计如表3所示,加入温控调节的数据统计如表4所示。

表3 未加入温控调节故障数据统计
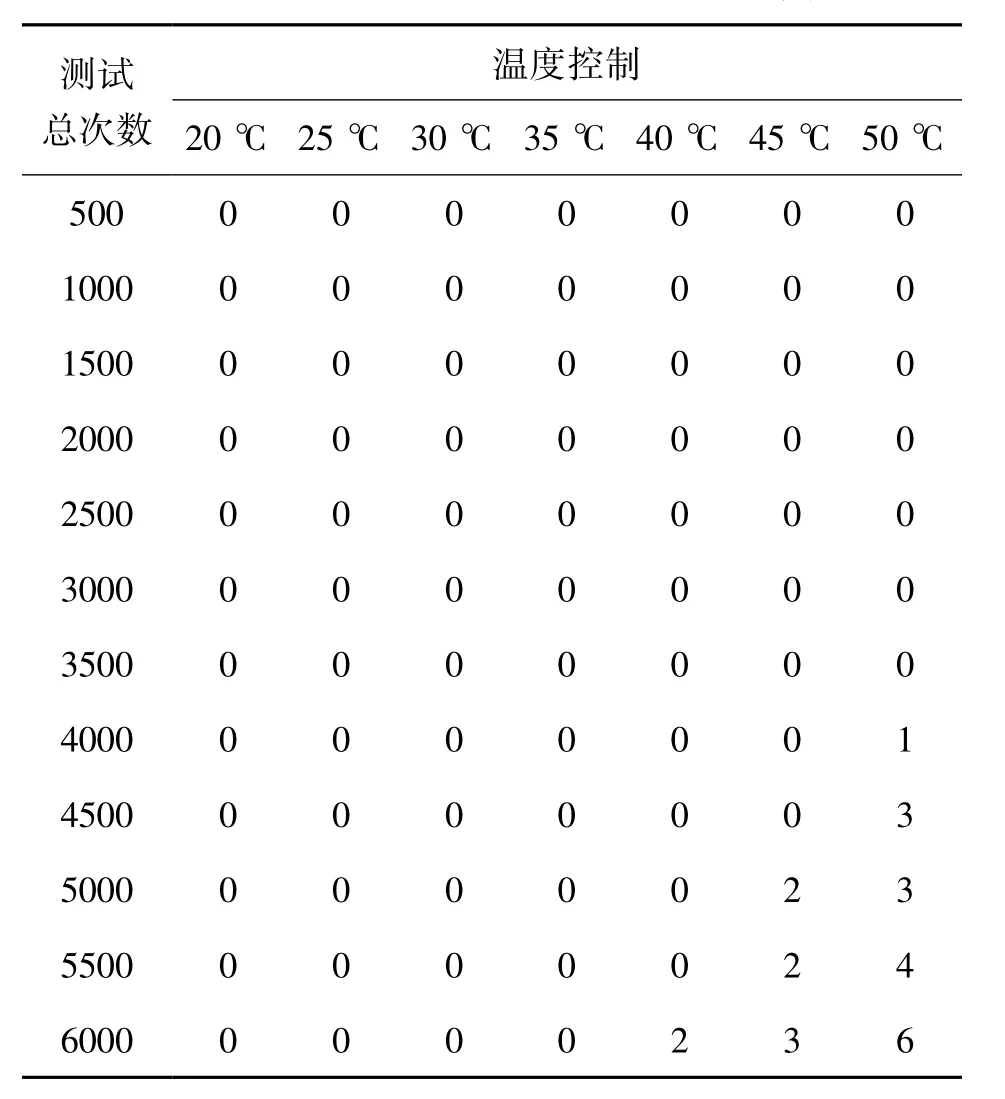
表4 加入控温调节故障数据统计 单位:次数
从表3和表4可以看出,电磁阀温度对辊闸设备正常运行影响明显。通过温度调节控制,提高设备的稳定性。将电磁阀温度控制在35℃以下,6 000次测量无故障,满足实际需求,同时也验证模糊PI控制温度调节系统设计的合理性。
4 结束语
经实验验证,智能辊闸系统采用分段模糊PI控温,对于电磁阀温度影响设备运行问题,得到有效的解决。系统结构简单,可靠性高,功耗低,满足实际需求。
参考文献:
[1]扈宏毅,游龙翔.DS1821在汽车空调制冷控制中的应用[J].电子器件,2002,25(3):305-308.
[2]周帅,张彤,崔一平.一种TEC温度控制模块的电路设计与仿真[J].电子器件,2008,31(5):1591-5193.
[3]苗汇静,孙桂华,王立新.通用有源滤波器设计[J].电子器件,2012,35(5):549-553.
[4]任家生.制冷机低温泵的故障分析[J].电子器件,1996,19 (4):298-302.
[5]董钊,高伟,甘玉泉.基于DSP的高精度恒温控制系统设计[J].电子器件,2009,32(4):855-858.
[6]丁丰平,张华强,苏振.基于预测控制的Fuzzy2PID控制器算法研究[J].电子器件,2007,30(6):2152-2154.
[7]陈刚,赵坚玉,陈文吾.紧凑型荧光灯U型管烤管机的温度控制[J].电子器件,1995,18(S1):82-87.
[8]吴俊卿,张浩然,范宇龙.基于PIC16F877的电动自行车控制器的设计[J].电子器件,2010,33(5):642-645.

宋相龙(1990-),男,江苏宿迁人,硕士研究生,主要研究方向为分析仪器设计,326089456@qq.com;

蒋书波(1975-),女,江苏南京人,副教授,主要研究方向为分析仪器设计,嵌入式系统等。
Design and Measurement of a VLF Low-Noise Amplifier
JIANG Yuzhong1*,CHEN Chuanke1,2,ZHANG Shuxia1,LIU Fei3
(1.College of Electronic Engineering,Naval University of Engineering,Wuhan 430033,China; 2.No. 92038 unit of People’s Liberation Army of China,Qingdao Shandong 266000,China; 3.No. 91919 unit of People’s Liberation Army of China,Huanggang Hubei 438000,China)
Abstract:When the VLF receiver is located in deep water,the weak communication signals are difficult to be detected,in order to solve the problem,a VLF low-nois ?plifier with excellent noise performance is designed.We first discussed some key technical points such as DC operating point selection,input impedance matching and the structure of Compound Electromagnetic Shielding by deeply analyzing the noise matching problems of amplifier,hence the noise figure of the amplifier can be lowered down greatly.A complete measurement solution and implementation steps are established for the special difficulties of the measurement of noise figure.The final test results show the noise figure is 1.71 dB,reduced by at least 1.5 dB compared with the classic amplifiers.
Key words:LNA; noise figure; noise matching; electromagnetic shielding; VLF
doi:EEACC:122010.3969/j.issn.1005-9490.2015.04.011
收稿日期:2014-09-12修改日期:2014-09-24
中图分类号:TM762
文献标识码:A
文章编号:1005-9490(2015)04-0764-05
