基于滑模变结构的PWM整流器系统设计
2015-02-22张红娟
张红娟
(唐山学院 智能与信息工程学院,河北 唐山 063020)
基于滑模变结构的PWM整流器系统设计
张红娟
(唐山学院 智能与信息工程学院,河北 唐山 063020)
根据三相电压型PWM整流器的主电路拓扑结构,建立了整流器的数学模型;对控制系统的电流内环采用滑模变结构的控制算法,对电压外环进行PI控制,并通过Matlab/Simulink进行了仿真。从仿真结果可以看出,滑模变结构PWM整流器系统具有较好的抗干扰能力。
PWM整流器;滑模变结构;PI控制
三相电压型PWM整流器装置是典型的非线性系统,其非线性表现在控制的不连续性上,而系统同时又存在着不可预见的外部干扰。滑模变结构控制方法通过控制量的切换使系统沿滑模面滑动,使得系统在参数摄动和外部干扰时具有不变性[1]。为此,笔者设计了基于滑模变结构PWM整流器系统。
1 三相电压型PWM整流器电路拓扑结构及数学模型
三相电压型PWM整流器电路拓扑结构如图1所示。电感L起滤波作用;C为直流侧电容,起稳压滤波的作用;R为线路与开关管的等效电阻;RL为负载。当整流器工作时,控制开关管导通占空比按正弦规律变化,使得输出侧的直流电压不变。
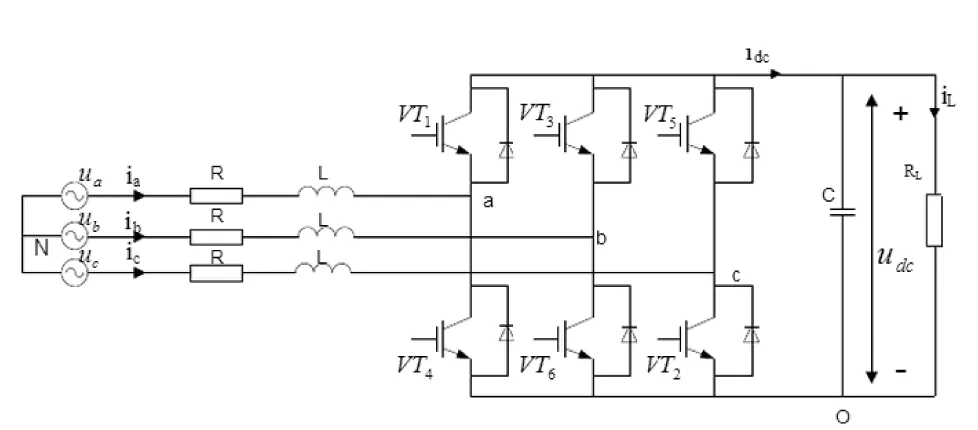
图1 三相电压型PWM整流器电路拓扑结构
定义单极性二值逻辑开关函数:
(1)
当sj=1时,表示开关管上桥臂导通,下桥臂关断;sj=0时,表示开关管下桥臂导通,上桥臂关断。PWM整流器在三相静止坐标系下的数学模型为[2]:
(2)
为方便分析,通过park变换[3]将ia,ib,ic电流投影等效到d,q轴上,将定子上的电流都等效到直轴和交轴上去,对于稳态来说,这样等效之后,id,iq是常数,通过三相静止a,b,c坐标系到两相同步旋转坐标系进行坐标变换,得到整流器在两相旋转坐标系下的数学模型为:
(3)
式中,ed,eq分别是三相电压ua,ub,uc在同步旋转坐标系下的d,q轴分量;id,iq分别是三相电流ia,ib,ic在同步旋转坐标系下的d,q轴分量;sd,sq分别是开关函数sa,sb,sc在同步旋转坐标系下的d,q轴分量。如果有需要可以进行逆变换(dq/abc)。
2 滑模变结构控制算法
滑模变结构控制通过自行设计所需的滑模面和等效控制律,能对变化的输入做出快速响应,而对参数变换和扰动不敏感,具有很好的鲁棒性。在系统控制过程中,控制器根据系统当时的状态,以跃变方式有目的地不断变换,迫使系统按预定的“滑动模态”的状态轨迹运动。变结构是通过切换函数实现的,特别要指出的是,通常要求切换面上存在滑动模态区,故变结构控制又常被称为滑动模态控制。
滑模变结构控制的基本原理在于,当系统状态穿越状态空间的滑动超平面时,反馈控制的结构就发生变化,从而使得系统的状态轨迹能够到达这个滑动超平面,并且沿着这个超平面运动至原点,这个超平面就是滑模面。系统在滑模面上的运动性能依赖于滑动模态参数的设计:
(4)
其中∂1,∂2均是正实数;id*,iq*分别是id,iq的给定值。
准滑动模态控制率为:
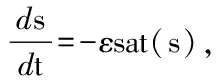
(5)
(6)
式中,W1,W2均为大于0的参数。
由公式(3),(4),(6)可求解得电流内环控制率:
(7)
电压外环控制器采用PI控制算法[4],三相电压PWM整流系统控制框图如图2所示。
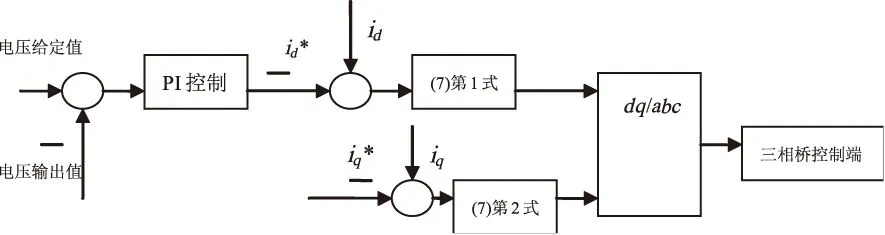
图2 系统控制结构图
3 应用Matlab/Simulink对系统进行仿真
三相电压PWM整流器是脉冲宽度调制,其6个脉冲信号由滑模变结构控制算法经过dq/abc反变换后产生。图3为PWM整流器电路滑模变结构控制图。当a1=0.765,a2=0.5,W1=15 000,W2=4 500时[2]仿真效果较好,图3中subsystem模块如图4所示,图4是图3的子系统,是主电路部分,其参数R=0.3 Ω,L=0.02 H,C=990 μF,负载电阻RL=100 Ω。
4 仿真结果
首先,系统可以在稳态时无静差输出,达到最基本控制要求,如图5所示。
其次,在0.5 s负载发生突变时,系统经过短暂波动恢复稳定运行状态,抗干扰能力较强。滑模变结构输出电压波形如图6所示。若在0.5 s时输入信号由250 V突变到280 V,系统经过短暂波动后恢复到280 V,稳定运行,说明系统抗干扰能力较强。滑模变结构输出情况如图7所示。
5 结论
滑模变结构具有动态响应快,对参数及扰动不灵敏,鲁棒性强的优点,对负载扰动和电网电压波动有很强的抗干扰性。
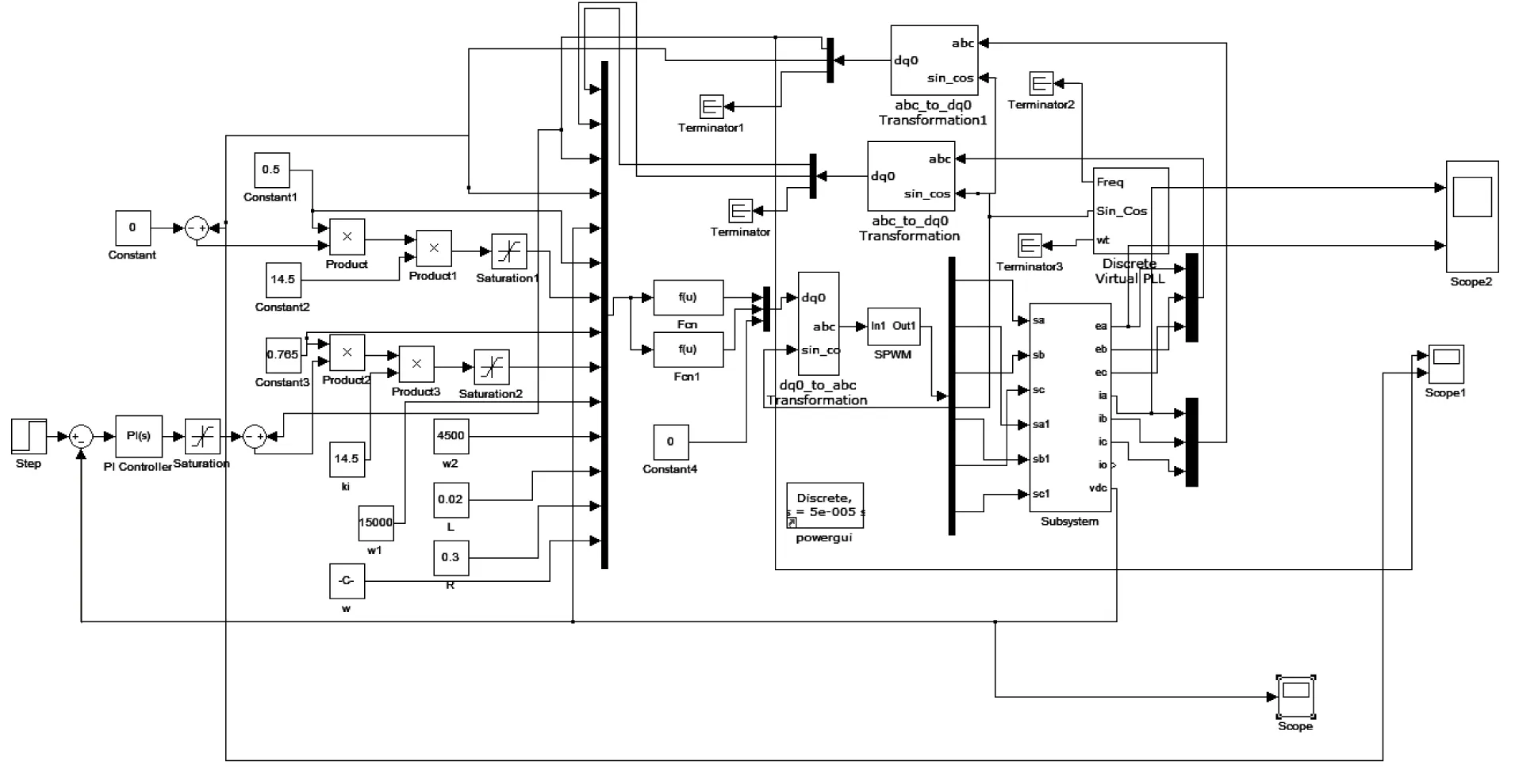
图3 PWM整流器电路滑模变结构控制
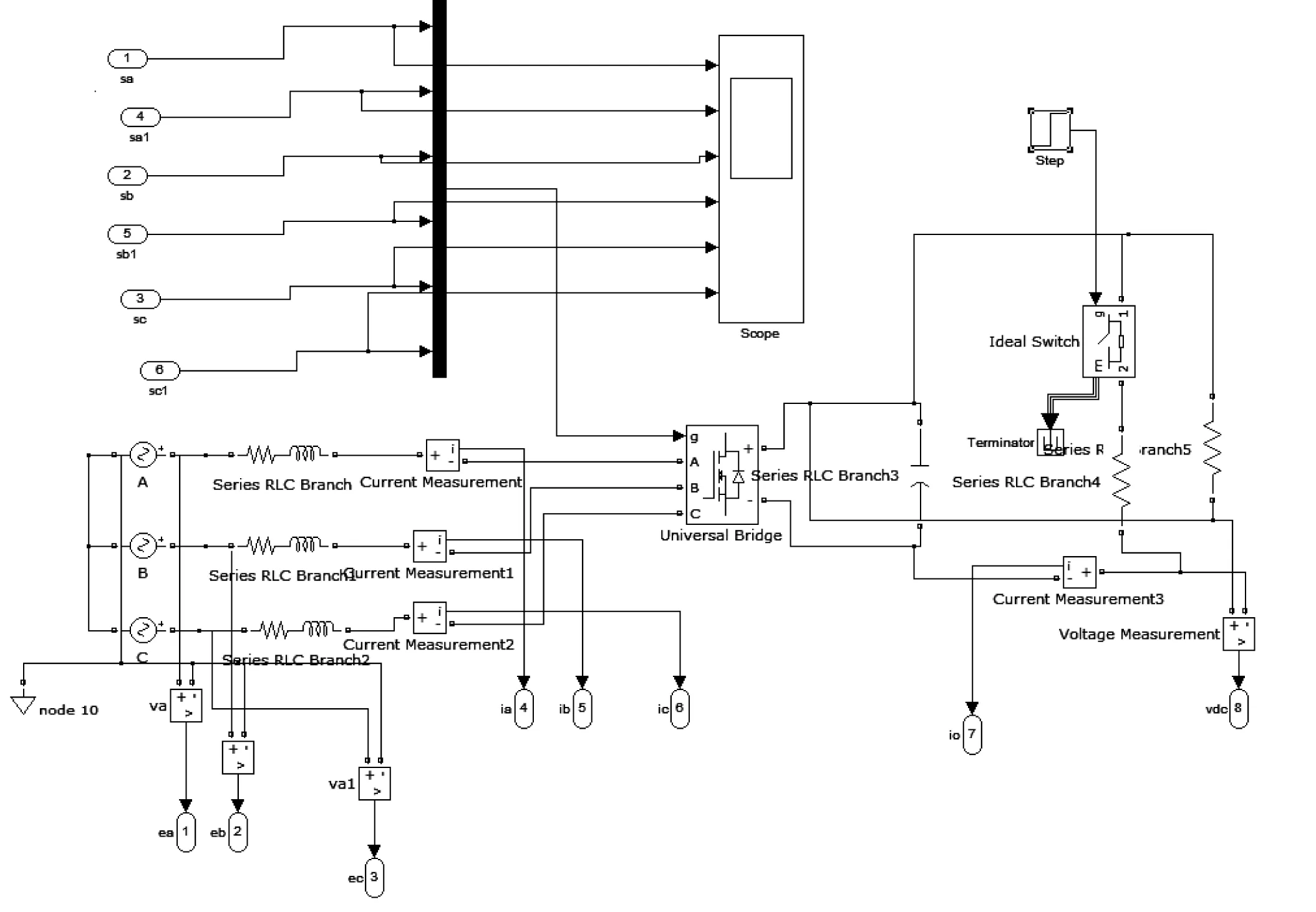
图4 PWM整流器仿真
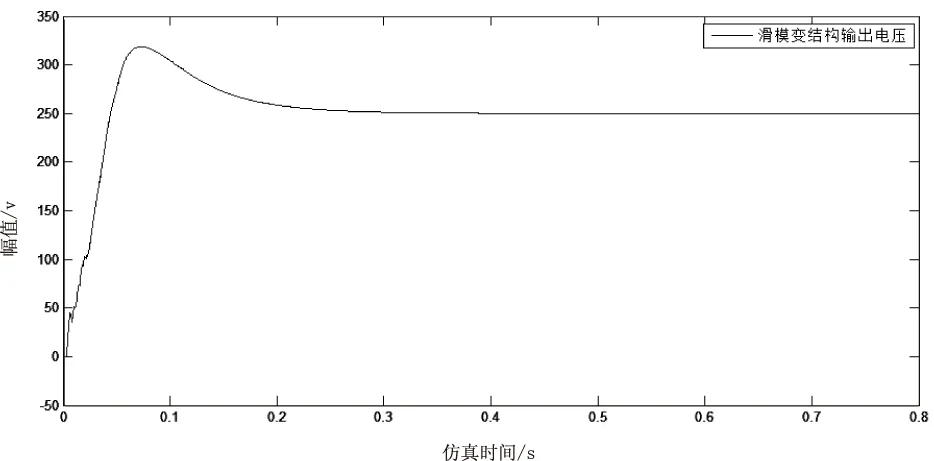
图5 滑模变结构稳态时无静差输出情况
图6 负载突变时滑模变结构输出情况
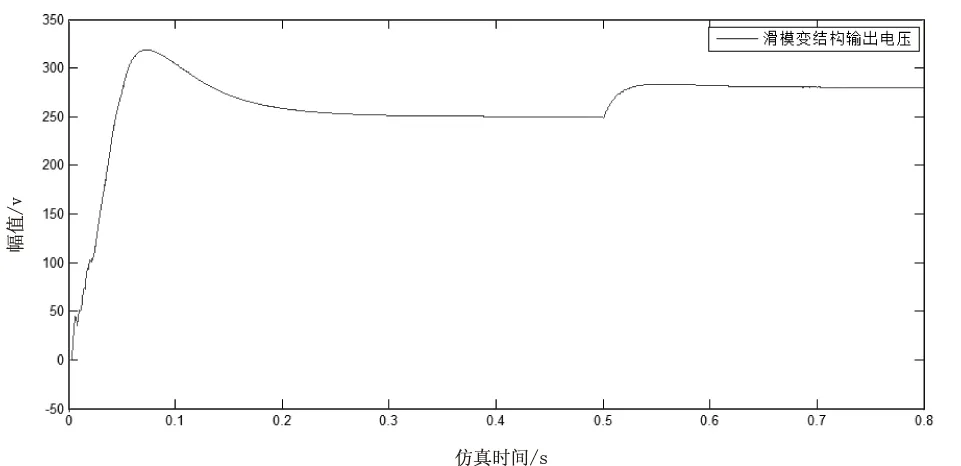
图7 输入信号发生突变时滑模变结构输出情况
[1] 刘金琨.滑模变结构控制MATLAB仿真[M].2版.北京:清华大学出版社,2005:53.
[2] 张晓华.控制系统数字仿真与CAD[M].北京:机械工业出版社,2015:232.
[3] 孔凡才.自动控制原理与系统[M].3版.北京:机械工业出版社,2006:229-230.
[4] 张崇巍.PWM整流器及其控制[M].北京:机械工业出版社,2003:67.
(责任编校:夏玉玲)
Design of the PWM Rectifier System Based on Sliding Mode Variable Structure
ZHANG Hong-juan
(School of Intelligence and Information Engineering,Tangshan College, Tangshan 063000, China)
The author of this paper has established the mathematical model of the three-phase voltage PWM rectifier according to the topology of its main circuit, applied sliding mode control algorithm to the inner current loop control system and simulated the PI control of the voltage loop through Matlab / Simulink. The simulation results show that PWM rectifier with sliding mode variable structure has a good anti-interference capability.
PWM rectifier; sliding mode variable structure; PI control
TM461
A
1672-349X(2015)06-0034-03
10.16160/j.cnki.tsxyxb.2015.06.013