一种航行体水弹道的数值仿真与试验研究
2015-02-22姚保太都军民
姚保太,都军民
(中国船舶重工集团公司第七一三研究所,河南郑州450015)
一种航行体水弹道的数值仿真与试验研究
姚保太,都军民
(中国船舶重工集团公司第七一三研究所,河南郑州450015)
摘要:针对一种航行体复杂的水弹道特性,对流固耦合数值计算方法进行分析,并在此基础上采用MSC.DYTRAN有限元分析软件建立起航行体水弹道仿真计算模型,应用该模型计算得到航行体水中运动规律。研究了水弹道缩比试验相似准则及测试方法,开展多发次缩比试验获取了航行体水弹道特性。仿真计算和缩比试验结果的对比分析表明二者一致性较好,试验和计算方法能够为相似研究提供指导。
关键词:水弹道;数值仿真;缩比试验;流固耦合;相似准则
Numerical simulation and test research of a certain vehicle underwater trajectory
YAO Bao-tai,DU Jun-min (The 713 Research Institute of CSIC,Zhengzhou 450015,China)
Abstract:In view of complicated underwater trajectory feature of a certain vehicle,fluid-solid interaction numerical calculation method was studied.The numerical simulation modular for underwater trajectory of vehicle was built with MSC.DYTRAN,a kind of FEA software.So the underwater trajectory feature was calculated based on the modular.Meanwhile,the similarity criteria of underwater trajectory scaled experiment and measurement method were studied.The whole underwater trajectory rules were acquired by tens of scaled experiments.The simulation calculation data and test data were compared and analyzed,and it shows that the calculation data and test data coincides with each other,so the calculation and test methods can offer advice for the similar design.
Key words:underwater trajectory; numerical simulation; scaled experiment; fluid-solid interaction; similarity criteria
0 引言
一种航行体在水下一定深度垂直发射,先后经历发射管内运动、水中运动、出水、重新入水等阶段,最终依靠正浮力漂浮于海面。其中航行体的管内运动特性称为内弹道,而在水中的运动特性被称为水弹道。为了实现航行体特定功能,需要对航行体的整个水弹道特性进行有效控制。
航行体水弹道的控制主要依靠其外形设计和安装在尾部的8块不对称舵板机构共同实现。当航行体发射出管后,尾部舵板快速张开,开始对航行体的姿态和速度进行控制。由于航行体水弹道包含水中段、出水段、空中段、再入水段以及最终静止漂浮过程,因此采用传统的解析方法,即通过建立运动学方程和动力学方程实现水弹道解算的难度非常大。为此,需要开展相应的仿真计算和试验研究,通过对这2种方法进行互校,确定合理的航行体水弹道计算模型和试验方法,最终获取真实有效的特征数据。
1 水弹道模型的建立与计算
1.1仿真计算模型的建立
航行体在水中的运动是一个典型的流固耦合过程,即航行体运动改变流场特性,反之周围流场变
化又影响航行体的运动规律,这二者之间相互作用、相互影响。流固耦合的概念在1933年由美国人H.M.Westergaard提出,但真正发展却是从20世纪80年代之后[1]。本文采用MSC.DYTRAN有限元分析软件[2-3],应用流固耦合方法对航行体出管后的运动特性开展仿真计算。
航行体运动过程中承受的作用力主要包括重力、浮力、管内燃气后效推力、海水阻力和海水作用在舵板上形成的侧偏力。计算模型中以航行体尾部出管为起始点开始计算,出管速度由内弹道计算获得。为简化计算,本计算模型不考虑舵板的张开过程,即在初始时刻舵板设为张开状态。
考虑到航行体的对称特性,沿其轴线建立一半模型,底部等效设置4块舵板,有限元模型如图1所示。航行体整体采用5852个CHEXA六面体单元网格离散,不考虑其变形,用MATRIG卡片设置半模型弹重和绕Z轴的转动惯量。流场包括空气域和海水域两部分,其中水域长18 m,宽5 m,深25 m;空气域长18 m,宽5 m,高15 m。在航行体偏转方向,计算域尺寸设置为航行体尺寸的10倍以上,可有效减小计算边界的影响。整个流体区域采用564 480个CHEXA六面体单元网格进行离散。其中,航行体网格采用Lagrange属性赋值,而流场网格采用Euler属性赋值。
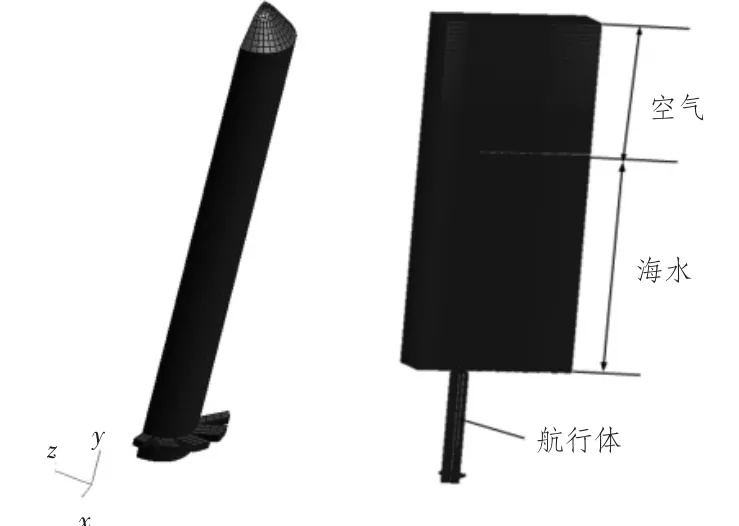
图1 有限元模型Fig.1 FEA Model
水下发射时,初始静水压力十分重要,本文根据实际工况,将流场模型中海水域深设置为25 m,空气域初始压力设定为101 328 Pa,水面静水压力设为101 328 Pa,采用HYDSTAT卡片设置静水压力随水深的变化规律。
1.2仿真计算结果分析
以航行体运动初始时刻的质心位置为原点,定义航行体轴向方向为X轴,发射管侧向为Y轴,Z轴符合右手法则。采用已建立起的有限元模型开展仿真计算,其中航行体水中运动过程如图2和图3所示。

图2 航行体水中运动示意图Fig.2 Underwater Motion Diagran
从图2(a)可以看出:由于航行体在水中高速运动,在出管0.88 s左右,头部开始出现明显的空化现象,同时在舵板部位也出现局部空化,同时,航行体在X-Y平面内开始发生偏转;图2(b)为航行体出管1.4 s后示意图,此时航行体头部接触气液界面即将出水,其姿态进一步发生偏转;图2(c)为航行体出管2.0 s后出水过程示意图,此时航行体质心位于水平面,可以看出在航行体出水过程中,偏转角度迅速增大。
图3表明了航行体在水中运动时X、Y方向的
位移和X-Y平面内的偏转角度。从图3(a)可看出,航行体出管后轴向速度逐渐减小,在大约2 s左右质心出水,此时轴向速度约为6 m/s;从图3(b)可知航行体水中运动过程中,质心侧向有微小位移,在1.7 s左右侧向位移达到最大值,约为0.13 m; 图3(c)则表明在X-Y平面内,由于舵板的作用,航行体侧向偏转角度快速增加,在出水时刻偏转角度达到30°。

图3 航行体水中弹道示意Fig.3 Underwater Trajectory of Vehicle
在水中运动过程中,航行体轴向速度迅速降低,这一方面是由于舵板作用使得航行体具有较大的轴向阻力系数,另一方面航行体侧向偏转角度增大使其攻角增加,也进一步造成了轴向阻力系数增大。
当航行体舵板开始出水时,舵板附近的流场状态变得异常复杂,导致计算收敛非常困难。因此应用数值仿真计算的方法,虽然可以得到航行体水中段的弹道特性,但对于出水以及重新入水过程的弹道求解难度非常大,最好采用试验方法进行获取。
2 水弹道缩比试验
2.1缩比试验方法
为获取航行体水中运动的全弹道特性,需要开展必要的试验进行研究。由于航行体尺寸较大,且水弹道试验又需要多发重复子样,进行1∶1试验无论从经费还是周期上都不具有可行性。因此,通过一定的缩比率开展水弹道缩比试验是唯一可行的技术途径。
在流场缩比试验中,首先要求航行体的结构外形上满足相似理论中的几何相似,然后再依据一定的缩比尺度,对流场进行相似简化。所谓流场相似,是指在对应时刻、对应位置的流场物理量成一定比例。决定2个流场相似的参数被称为无因次参数,无因次参数包括雷诺数(Re)、空泡数(σ)、傅汝德数(Fr)、斯特罗哈数(St)、欧拉数(Eu)等。在实际缩比试验过程中,由于受到条件限制,很难使得2个流场同时全部满足上述所有的无因次数,只能通过对试验目的分析来进行合理的取舍[4]。在本缩比试验中,航行体的水中运动与重力密切相关,傅汝德数(Fr)应必须满足;其次,欧拉数(Eu)反映了流体压力与惯性力的关系[5-8],对水弹道的分析影响较大,也应当满足相似准则,但满足欧拉数(Eu)相似对试验条件要求非常高,因此本试验选取欧拉数(Eu)的特例之一空泡数(σ)满足相似准则。而对于其他无因次数,则在本试验中不作相似模拟。
确定空泡数和傅汝德数2个相似准则,其中:
式中: p为发射当地水深静压; pv为水的饱和蒸汽压力;ρ为水密度; v为航行体运动速度; L为航行体特征长度。
本试验采用1∶10缩比试验方案,缩比试验航行体模型的质量、几何外形均与原型几何相似,发射水深、航行体出管速度满足空泡数和傅汝德数相似准则。
试验中,为获取航行体水中运动的轨迹和姿态信息,采用内测和光测2种测试手段。内测系统的核心是一个捷联式惯性组件,通过测量缩比模型水下发射过程中的角速度和质心加速度,并采用四元
数方法进行数据处理,获取模型运动的俯仰角、偏航角、滚动角以及速度和位移等参数[7]。光测系统采用高速摄像记录缩比模型出水后至入水前的空中姿态[8]。
2.2缩比试验数据分析
缩比试验结果如图4所示,其中5条典型曲线的特征点见表1。

图4 水弹道缩比试验Fig.4 Underwater trajectory scaled experiment
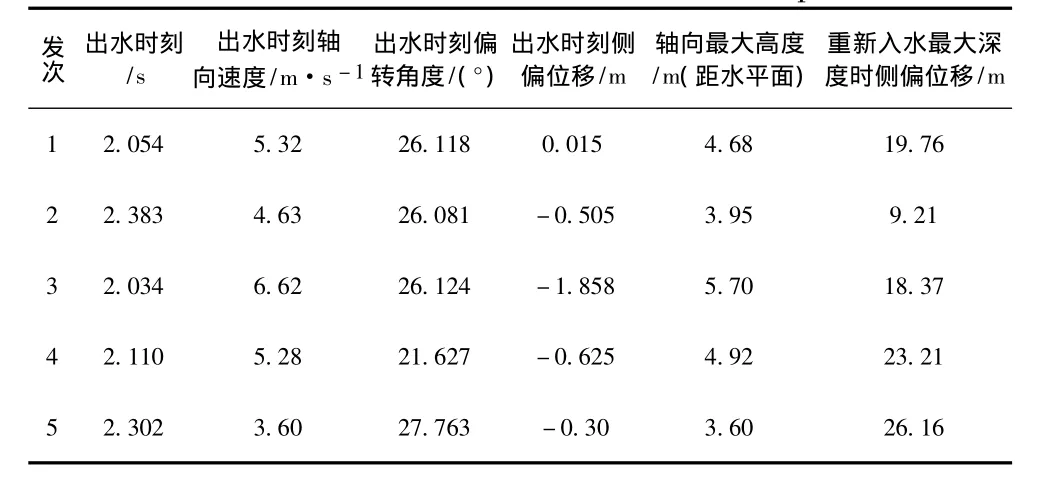
表1 缩比试验若干发次特征点Tab.1 Characteristic value of some scaled experiments
从表1可看出,在缩比试验中,航行体质心出水时刻在2~2.5 s之间,同仿真计算得到的2 s基本吻合;航行体出水速度为3.6~6.6 m/s之间,存在一定的离散,但同仿真计算得到的6 m/s也基本相近;航行体出水时刻偏转角度大约在20°~30°之间,出水时刻侧偏位移基本小于2 m,与仿真计算得到的偏转角度30°、侧偏位移0.13 m相比偏差较小,这也说明航行体在水中运动时比较稳定,位移和姿态的离散性不大。
但从航行体重新入水达到最大深度时的侧偏位移数据分析,航行体在出水并重新入水后,位移和姿态都开始出现较大离散,这从图4也可看出,2.5 s之后航行体的侧偏位移数据开始快速发散。分析认为:由于舵板位于航行体尾部,在航行体以一定角度出水的过程中,转动角速度加快,从而形成不同的空中姿态,导致航行体重新入水时,初始状态差异非常大,从而形成重新入水后较大的水弹道离散。
3 结语
通过航行体水弹道的仿真计算和试验研究,可以得到以下结论:
1)缩比试验和仿真计算结果吻合较好,说明仿真计算模型正确、合理,计算精度能够满足相似产品开展水弹道设计要求;
2)通过分析,提出了航行体水弹道缩比试验应满足空泡数(σ)和傅汝德数(Fr) 2个相似准则;
3)该航行体在水中运动过程中,出水时间大约在2~2.5 s之间,出水时刻偏转角度在20°~30°之间,出水时刻的侧向偏转位移非常小,一般不大于2 m,这表明航行体在水中运动的姿态稳定,离散性小,可控性强;
4)航行体出水并再入水后,姿态、位移的离散性迅速增大,重新入水至最大深度时侧偏位移产生较大散布,这表明航行体重新水后姿态产生一定发散,但与侧向位移相比,航行体的轴向位移偏差离散变换不大,仍存在一定的规律性。
参考文献:
[1]张阿漫,戴绍仕.流固耦合动力学[M].北京:国防工业出版社,2011:2-3.
[2]杨振波,李世芸,王军.运用MSC.Dytran的钛合金气瓶跌落仿真分析[J].现代制造工程,2010(1) :112-115.YANG Zhen-bo,LI Shi-yun,WANG Jun.The drop-fall simulation of cylinder made of titanium alloys based on MSC.Dytran[J].Modern Manufacture Engineering,2010 (1) :112-115.
[3]王工,陈克.应用MSC.Dytran研究汽车保险杠碰撞过程[J].沈阳理工大学学报,2005,24(2) :47-50.WANG Gong,CHEN Ke.A study on the collision behavior of the bumper by MSC.Dytran[J].Transactions of Shenyang Ligong University,2005,24(2) :47-50.
[4]陆超,姜治芳,王涛.利用缩比模型CFD数值模拟计算舰船舰面空气流场相似准数的影响探讨[J].中国舰船研究,2008,3(6) :45-48.LU Chao,JIANG Zhi-fang,WANG Tao.Discussion on comparability of scaled models for CFDnumerical simulation for ship air wake[J].Chinese Journal of Ship Research,2008,3(6) :45-48.
[5]程素秋,宁永成,张臣,等.相似理论在水下爆炸模型试验中的应用[J].舰船科学技术,2008,30(3) :95-100.CHENG Su-qiu,NING Yong-cheng,ZHANG Chen,et al.The applicability of scaling laws to underwater explosion models tests[J].Ship Science and Technology,2008,30 (3) :95-100.
[6]黄寿康.流体动力.弹道.载荷.环境[M].北京:宇航出版社,1991:164-167.
[7]吉大海.训练航行体水中轨迹和姿态测量方法[J].舰船科学技术,2014,36(1) :147-151.JI Da-hai.Measurement method research on exit-water trajectory and posture of training missile[J].Ship Science and Technology,2014,36(1) :147-151
[8]陈华成,王伯雄,罗秀芝.集成多测量技术的自动检测系统[J].机械科学与技术,2005,24(5) :578-581.CHEN Hua-cheng,WANG Bo-xiong,LUO Xiu-zhi.Multisensor-based automatic inspection system[J].Mechanical Science and Technology,2005,24(5) :578-581.
作者简介:姚保太(1973-),男,高级工程师,主要从事控制、计算机仿真等研究工作。
收稿日期:2015-04-18;修回日期: 2015-05-22
文章编号:1672-7649(2015) 07-0104-04doi:10.3404/j.issn.1672-7649.2015.07.023
中图分类号:TL375
文献标识码:A
