双目光电综合侦察平台设计及信息处理
2015-02-20金晓会杨卫邓立齐
金晓会杨 卫邓立齐
(1.中北大学电子测试技术重点实验室,山西 太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
双目光电综合侦察平台设计及信息处理
金晓会1,2,杨 卫1,2,邓立齐1,2
(1.中北大学电子测试技术重点实验室,山西 太原 030051;2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
为检测定位高危特殊环境下的目标,设计一种双目光电综合侦察平台。平台主要集成非平行式双目红外热像仪、激光测距、云台等装备,整体结构呈U型。平台设计的两个热像仪性能一致且光轴交叉,根据最小二乘法可计算出目标的运动轨迹,同时根据目标速度选择激光测距或双目红外热像仪测距方式,以获取目标的准确距离,完成目标的最终定位。该平台可代替侦察人员检测高危区域。
光电平台;目标定位;双目视觉;激光测距
0 引 言
光电综合侦察系统经过了半个多世纪的发展,其配备已经从简单的光学瞄准具发展为集雷达、激光测距、电视跟踪等高端设备为一体的多功能侦察系统[1-2]。美国在这方面的研究一直处于领先地位,设计了LRAS3系统,该系统为一种地面作战监视系统,用于“斯特赖克”装甲车和防地雷反伏击车等平台,采用多传感器红外系统,能够在低可见度条件下工作[3];英国科研机构设计了“蛇眼”系统,采用实时视频流信息处理方式为乘员提供作战现场目标信息。目前光电综合侦察平台具有自主搜索、目标检测、目标跟踪识别功能[4],而应用层面也由原来的简单背景侦察变为复杂地形、军事战场、高危地带的险情侦察[5],起到了越来越重要的作用。
为了更好地提升光电综合侦察平台的定位精度,达到战场无死角、高准确度侦察需求,改变传统的单目视觉侦察平台,以双目双向定位方式锁定目标,设计了一种双目光电综合侦察平台。该双目光电综合平台主要集成了两个性能一致的红外热像仪、2 000 m量程激光测距机和全自动双自由度云台等设备,能够通过双目视觉定位方法检测运动目标轨迹和目标当前与平台的实际距离。
1 双目光电综合侦察平台一体化设计
双目光电综合侦察平台核心传感器为两个性能一致的红外热像仪,在内部设计中,热像仪A与热像仪B对称于中心轴密封在两侧,两个热像仪光轴夹角为θ,激光测距发送器与接收器平行放置于中间。如图1所示为内部排列构成,图2为传感器组主视图。
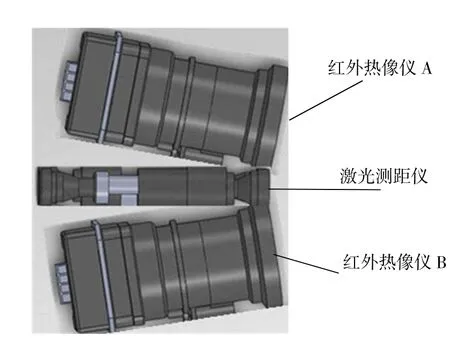
图1 内部构成
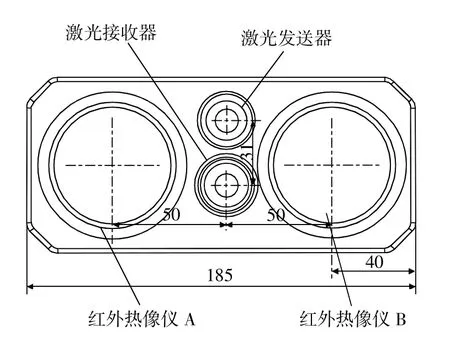
图2 传感器组(单位:mm)
整个光电综合侦察平台集成了伺服云台、红外热像仪、激光测距仪、内部处理电路等。其中云台为高精度双自由度可控型云台,可完成传感器组的水平旋转和垂直运动;传感器组主要用于收集外部信息;信息处理单元主要控制传感器运行和对传感器收集到的信息进行处理。图3为光电侦察平台一体化结构设计,整体构架采用U型支撑构架,U型构架具有安全系数大、抗干扰能力强、刚度强等特点[6],能够提高战场中平台的抗打击能力。

图3 整体结构设计
2 双目光电综合侦察平台信息处理技术
光电综合侦察平台工作原理如图4所示,其工作流程为,首先在红外检测系统中植入图像算法检测可疑目标,一旦发现有可疑目标后,在图像坐标系上通过跟踪框标记对目标进行跟踪,此时双目红外热像仪定位系统将对目标的轨迹进行计算,同时检测运动目标的运动速度,通过设置速度阈值,选择激光测距或双目红外热像仪测距,得到目标准确的距离,最终定位出目标的具体方位。
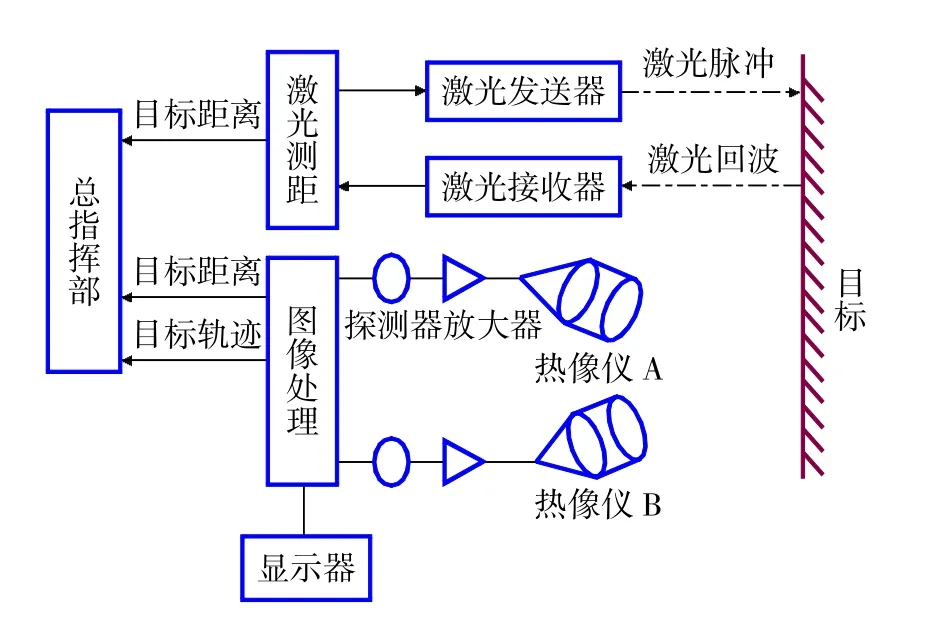
图4 光电综合侦察平台工作原理
2.1 双目红外热像仪定位原理

图5 双红外热像仪成像
该平台采用性能一致的两个红外热像仪,两个热像仪的光轴交叉,当目标出现在感知画面中,两个红外热像仪将在同一时间收集目标在同一地点出现的两种状态。系统的成像原理如图5所示,红外热像仪焦距为f,W为基准线,两个光轴的夹角为θ。
定位原理是根据两个红外热像仪在同一时间拍下相同场景中的两帧照片来实现目标定位[7-8],如图6所示。假设热像仪A和热像仪B具有相同的焦距f和像素尺寸D,A热像仪的坐标系是O1x1y1,B热像仪的坐标系是O2x2y2,x1O1y1平面和x2O2y2平面在同一个平面上,假设C1坐标系为世界坐标系,设外界有任意一点M,m1表示MO1与A热像仪焦平面I1的相交点,m2是MO2与B热像仪焦平面I2的相交点,由于光轴z1、z2分别垂直于I1、I2平面,所以I1和I2分别平行于x1轴和x2轴,而A的光学中心O1与B的光学中心O2的距离为W,O1O2是A坐标系的x轴,MO1O2平面和两个焦平面I1、I2的交叉线分别为E1、E2,此时如果A坐标系沿着y轴旋转θ度,A坐标系将完全重合于B坐标系。
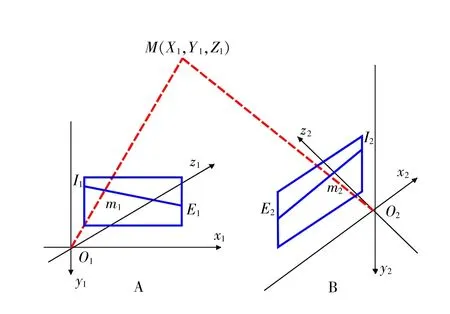
图6 双目视觉定位原理
空间点M所在的坐标系是(X1,Y1,Z1),而图像平面中m1点像素坐标为(u1,ν1),m2的像素坐标为(u2,ν2),则有M坐标为
式中 (u0,ν0)是红外热像仪A的光轴与图像平面I1的交叉点,b=f/d(d为目标在每帧图像中行走的距离)。对于u1、u2、ν1、ν2,由于他们是理想坐标系,而实际应用中应考虑摄像头畸变引起的径向因素。
目标运动轨迹可通过多帧图像计算出来,采用双目立体视觉计算多帧图像的位置(Xn,Yn,Zn),n代表帧号,获取10帧图像,根据最小二乘法拟合计算出目标运动轨迹。
2.2 测距原理
平台设计中集成了两种测距技术,分别是双目测距和激光测距,两种测距方法各有优缺点,只有集成两种测距方案才能对目标准确测距。双目红外热像仪在目标静止和缓慢移动时测距准确性较高,然而当目标快速移动时,双目视觉就无法满足实时性的需求,在实际应用中容易错过快速移动的目标。激光测距模块具有实时性好,测距频率高和体积小的特点,能够及时向指挥部汇报目标距离信息,然而存在激光光束无返回值和返回错误目标信息的情况,测距结果相对稳定性较差。实际作业时,根据目标的速度决定采用测距方式,设置速度阈值为ν0,当检测到的目标速度<ν0时,采用双目红外热像仪测距,当速度≥ν0时,采用激光测距。
2.2.1 激光测距原理
平台采用脉冲式激光测距传感器,在测距原点向测得的目标发射一束激光,光照射到目标上反射回的一部分激光被激光接收器接收,假设激光从发射到接收总时间为Δt,则被测目标距离激光测距传感器的距离为

式中:R——目标与激光测距的距离;
c——大气光速[9-10]。
激光信息处理器接收到上级的发射指令后,控制激光器产生激光脉冲,经准直后发向目标,少量返回的激光进入到采样电路中形成回波信号,接收光学系统将回波信号经放大、滤波等处理检测出光回波信号,并与主波一起发送给激光信息处理器。经过信息处理器对主波和回波的信号时延精密测量,从而得到目标距离。
2.2.2 双目红外热像仪测距原理
在世界坐标系中,目标运动轨迹上任意一点M都是可以通过双目视觉定位原理实现的,点M坐标是(X1,Y1,Z1),激光测出的点M距离光电综合侦察平台的距离是L,在理想状态下,非平行式红外热像仪测距原理如图7所示。

图7 非平行式双目测距原理
图中,AQ为垂直于A摄像头光轴的线段,设长度为s,则有:
由图7相似三角形关系计算可得:
根据成像关系可得L长度为

3 结束语
设计了一种双目红外热像仪的智能光电综合侦察平台,对该平台的结构和信息处理技术进行了详细描述。在光电综合侦察平台中添加双目红外热像仪能够提升整体平台的感知能力,利用相关信息处理技术可以计算出目标的运动轨迹和实际距离。该光电综合侦察平台可应用于高危场景下的目标感知,能够增加战场作战能力。
[1]陆君,吕彤光.光电探测技术在火控系统中的应用及发展[J].红外与激光工程,2012,41(4):1047-1051.
[2]刘光灿,白廷柱.轻武器新型智能光电火控系统设计[J].红外技术,2005,27(3):207-209.
[3]Battery power Group.Saft Wins$1.2 Million DLA Contract to Improve the ALPS Battery for the Long-Range Advanced Scout Surveillance System[J].Battery power,2013,17(2):26-26.
[4]邓洪高,王国富,孙少帅,等.光电跟踪系统高速运动目标快速跟踪算法[J].光通信技术,2012,36(3):53-55.
[5]马超杰,杨华,李晓霞,等.复杂场景多传感器图像的多目标分割算法[J].光电工程,2009,36(1):47-51.
[6]解志红,杨似琼,游小嘉,等.光电综合搜索平台动态性能仿真与分析[J].火力与指挥控制,2014(z1):64-65.
[7]祝琨,杨唐文,阮秋琦,等.基于双目视觉的运动物体实时跟踪与测距[J].机器人,2009,31(4):327-334.
[8]胡天翔,郑加强,周宏平,等.基于双目视觉的树木图像测距方法[J].农业机械学报,2010,41(11):158-162.
[9]吴健,吴星明,陈伟海,等.三维景深数据采集和图像重构系统研究[J].中国测试,2011,37(4):1-4.
[10]施智勇,潘晓声,张谦,等.利用延时法进行高精度脉冲激光测距[J].光学精密工程,2014,22(2):252-258.
Binocular electro-optical search platform design and information processing
JIN Xiaohui1,2,YANG Wei1,2,DENG Liqi1,2
(1.Science and Technology on Electronic Test&Measurement Laboratory,North University of China,Taiyuan 030051,China;2.Key Laboratory of Instrumentation Science&Dynamic Measurement Ministry of Education,North University of China,Taiyuan 030051,China)
A binocular electro-optical search platform was proposed to locate the target in special and dangerous environments.The platform in a U-shaped structure is chiefly integrated with a nonparallel binocular infrared system,a laser rangefinder and a cradle head.Moreover,it is provided with two thermal imagers with the same performance and crossing axis to calculate the trajectory of the target by least squares.Meanwhile,laser rangefinders or binocular infrared thermal imagers are selected according to the speed of the target to measure the accurate distance and target location.The platform can be used as a substitute for scouts in special and dangerous environments.
electro-optical search platform;target location;binocular vision;laser rangefinder
A
:1674-5124(2015)10-0104-04
10.11857/j.issn.1674-5124.2015.10.023
2015-01-29;
:2015-03-05
金晓会(1988-),女,辽宁朝阳市人,硕士研究生,专业方向为图像检测与目标识别。
