基于单轮差动制动的汽车横向稳定性控制研究及仿真分析
2015-02-20
(广西大学机械工程学院,广西 南宁 530004)
在行驶过程中,汽车会因载荷的转移、轮胎侧偏刚度的降低、急转弯、紧急变道、路面湿滑、外界干扰、驾驶员操作不当等原因,而失去横向稳定性,从而引发危险[1-2]。尤其是,当汽车高速行驶在湿滑路面上进行大幅度转向、连续变道等动作时,汽车的横向稳定性会降低,从而引起激转、侧滑、甩尾等危险状况,进而引发交通死亡事故。近年来,国内外的许多学者相继进行了通过差动制动来改善汽车高速行驶时的稳定性的相关研究[3-4]。差动制动是指对行驶过程中的汽车的每个车轮施加不同的制动力,产生附加横摆力矩,来改变汽车的横摆运动状态。差动制动是一种可以保证汽车制动时横向稳定性的制动控制方法。本文正是基于单轮差动制动进行整车仿真,说明单轮差动制动对汽车横向稳定性的影响。
1 单轮差动制动的横向稳定控制
行驶中的汽车进行左转向动作时的受力模型如图1所示。
由图 1 可知,力Fx1,Fx3,Fy1,Fy2对汽车重心O形成转矩Mzf和Mzf使汽车产生向弯道内侧偏转的角速度。力Fx2,Fx4,Fy3,Fy4对汽车重心O形成转矩Mzr,Mzr使汽车产生向弯道外侧偏转的角速度。从图可看出,当Mzf
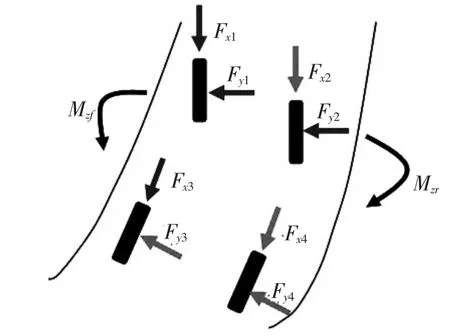
图1单轮差动制动力学分析图
下面分别对汽车的四个车轮单独施加制动力,来分析汽车所产生的附加横摆力矩。
当前内轮制动后,由于制动力原因,Fx1增大,侧向力Fy1减小,由图1可知,Fy1的减小会致使转矩Mzf的减小,Fx1增大会使转矩Mzf增大。所以当制动前内轮时,侧向力Fy1的减小和Fx1的增大所改变的力矩相互抵消一部分,对整个汽车横摆力矩的改变影响不大。当制动前外轮时,由于制动力原因,纵向力Fx2增大,侧向力Fy2减小,由图1可看出,侧向力Fy2减小会致使转矩Mzf的减小,而Fx2增大会致使转矩Mzr的增大。所以当汽车出现转向过度时,即Mzf>Mzr时,制动前外轮最有效,侧向力Fy2的减小,纵向力Fx2的增大所产生的力矩能产生叠加的效果,都会缓解抵消致使汽车转向过度的力矩。同理分析,当汽车出现转向不足时,制动后内轮最有效,侧向力Fy3的减小,纵向力Fx4的增大所产生的力矩都会缓解抵消致使汽车转向不足的力矩。
对不同车轮单独施加制动力时,所产生横摆力矩的效果如图2所示[5]。
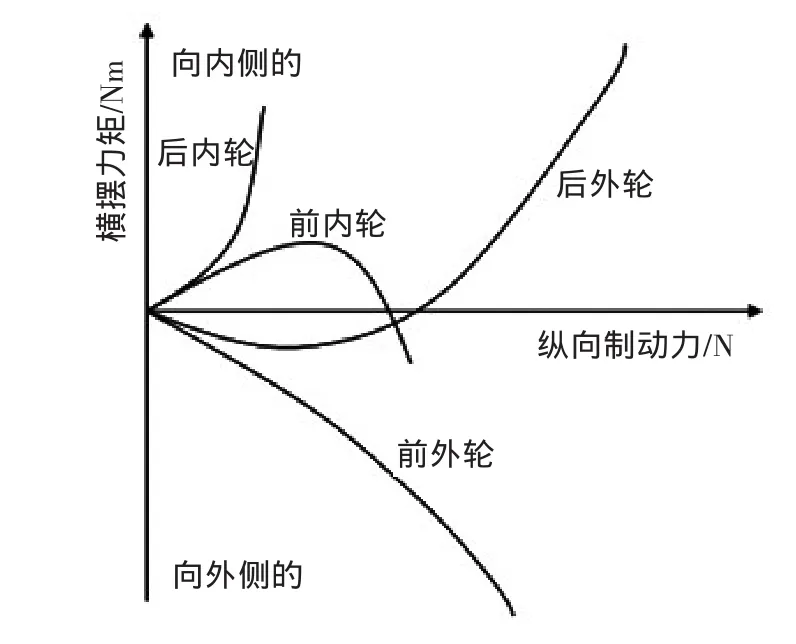
图2各车轮作用制动力所产生的横摆力矩
综合分析图1和图2可知,对汽车的不同车轮进行单独差动制动时,所产生的控制效果是不同的。其中,对前外轮单独进行差动制动时,对纠正汽车转向过度的效果最明显;而对后内轮单独进行差动制动时,对纠正汽车转向不足的效果最明显。在对其它两轮进行差动制动时,因侧向力降低所引起的附加横摆力矩与因纵向力所引起的附加横摆力矩相互抵消了一部分,所以制动效果不明显。故本文采用对单个车轮进行差动制动的方式来实现对汽车的横向稳定性控制。
2 控制系统仿真结果分析
在Matlab/simulink软件环境下,建立汽车横向稳定性控制系统的simulink仿真框图,如图3所示。通过这个控制系统,能够对汽车的一些典型工况进行研究和仿真分析。

图3汽车横向稳定性控制系统的simulink仿真框图
本文选择汽车在行驶过程中经常遇见的一种典型工况——突然进行连续变道,该工况相当于汽车方向盘选择角正弦输入。本文选择汽车的质心侧偏角、横摆角速度及侧向加速度这三个能够有效表达汽车运行状态的参数作为有效输出。
在方向盘角正弦输入下,前轮转向角随时间变化的输入曲线如图4所示。
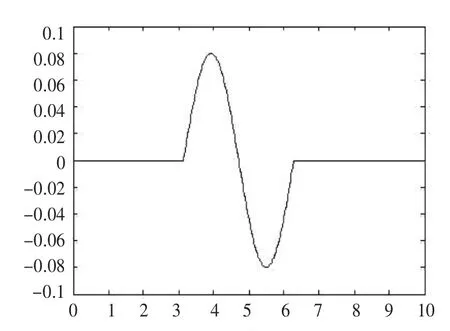
图4前轮转向角正弦输入
当路面附着系数为0.3,制动初速度为110 km/h,前轮转向角为正弦输入时,在无控制系统和有基于单轮差动制动的横向稳定性控制系统两种情况下,汽车的质心侧偏角、横摆角速度和侧向加速度的仿真输出结果如图5~7所示。综合分析图5~7可知,在无控制时,由于路面附着系数低,路面能够提供的附着力比较小,因此汽车失去了横向稳定性;从图7也可看出,汽车侧向加速度很快达到并且超过了极限值0.2g。而对于有基于单轮差动制动的横向稳定性控制系统的汽车,在轮胎侧向力达到附着极限时,控制系统开始发挥作用,通过对车轮施加制动力产生附加力矩,从而使汽车重回稳定工况。从图中可看出,相对于无控制时,汽车横摆角速度能很好跟踪其期望值,且侧向加速度和质心侧偏角波动幅度也明显得到抑制,能被限定在一个较小范围内,保证汽车处在稳定性区域,使汽车能平稳的行驶在路面。
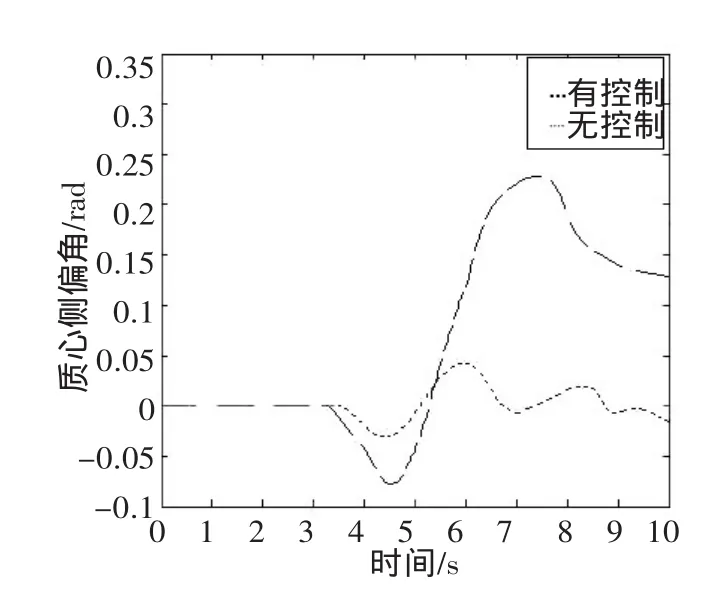
图5质心侧偏角的输出

图6横摆角速度的输出
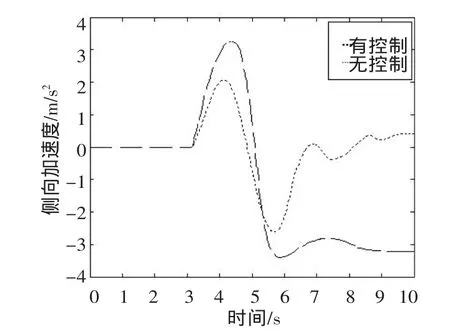
图7侧向加速度的输出
3 结束语
通过以上仿真分析,采用单轮差动制动方式,汽车的质心侧偏角、横摆角速度、侧向加速度等输出变量及输出响应参数都能得到很好的控制,横摆角速度也能很好的跟踪期望值。由此可见,当汽车在高速行驶并进行大角度转弯和连续变道等工况时,差动制动能在很大程度上提高汽车的行驶稳定性,保证汽车在行驶时能处于较稳定状态。
本文仅研究了对于单车轮进行差动制动的工况,对于四个车轮同时制动的差动制动以及四个车轮上的制动力大小的协调分配有待于进一步的研究。
[1]蔡 果.汽车横向稳定性与交通安全分析[J].内蒙古公路与运输,2001,(67):41-44.
[2]余志生.汽车理论[M].第2版.北京:机械工业出版社,1999.
[3]Pahngroc Oh,Hao Zhou,Kevin Pavlov.Stability control of combination vehicle[J].SAE Paper,2001,128(1):34-42.
[4]何 锋,杨利勇,刘章仪.基于差动制动的防侧翻车辆动力学控制研究[J].现代机械,2003,28(5):31-33.
[5]谢敏松.汽车ESP液压系统动态特性研究[D].重庆:重庆大学,2007.