履带式两栖车辆绕流场的数值计算
2015-02-20
(解放军理工大学野战工程学院,江苏 南京 210007)
履带式两栖车辆航行时的水动力特性与轮式两栖车辆有一定差异,开展履带式两栖车辆的绕流场及水动力特性研究,将对提高履带式两栖车辆的水上性能有很大意义[1]。根据数值分析结果,可以实现对车体的外形进行优化设计,为今后研制具有更好水上性能,能够适应更加复杂海况的新型两栖车辆,提供一定的理论依据。
近年来,随着计算机性能的提升和数值模拟方法的不断改进,使得计算流体力学(CFD)的应用范围不断拓展。借鉴船舶的流场数值模拟方法,利用CFD软件,对两栖车辆的绕流场进行数值分析,是更为经济、快捷、高效的方法[2]。
1 数学模型
1.1 湍流模型的控制方程
连续方程[3]:
△·u=0
动量方程:

1.2 边界条件设置
计算区域的边界条件包括:壁面、速度进口、出口边界、对称面、交界面。具体设置情况如下:
(1)壁面:将装备车体表面和远场壁面设置为无滑移边界条件。
(2)速度进口:按照车辆航速确定,湍动能和湍流耗散率参照经验公式给出。
(3)出口边界:装备航行过后,其后部的流动可认为是完全发展的,适用出口边界条件。
(4)对称面:将车体的中心面定义为对称面边界条件。
(5)交界面:由于近车体流场与外部流场所划分的网格类型不同,要实现结构化网格与非结构化网格间的相互关联,就要将两种网格的重合面定义为为交界面边界条件。
2 数值计算
2.1 计算模型
两栖车辆车体表面线型复杂,主要研究其水中航行时的流场特性,因此计算模型需要有所简化,模型的基本尺寸来源于实装,如图1所示。
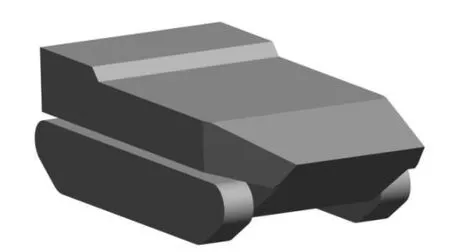
图1简化的车体几何模型示意图
车体总长7.67 m,宽3.1 m。车体模型的长宽比L/B=2.48,影响其快速性和航向稳定性;车宽吃水比B/T=1.94,影响其抗横摇稳性;车高吃水比H/T=1.3,一定程度影响其抗沉性和装载能力。
2.2 网格划分
网格划分的策略,需要根据工程问题的具体情况来制定。不同的网格划分策略,对生成的网格质量影响很大。而网格质量的好坏,直接关系到数值计算的精确性、收敛性和时效性。因此,应根据两栖车辆的绕流场具体情况,进行网格划分。如图2所示。

图2 计算区域划分
在近车体流场区域采用非结构化网格,并在车体近壁范围内使用边界层过渡网格,外围流场区域采用结构化网格,并对车体和自由液面附近的网格进行加密处理。如图3所示。
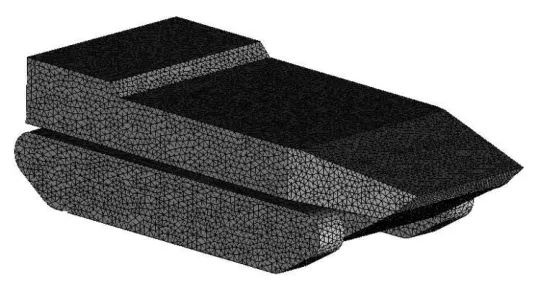
图3 车体表面网格
2.3 离散格式
本文控制方程的扩散项采用中心差分格式离散,对流项采用如下格式离散:梯度设置为最小二乘法,对于压力方程采用体积力加权格式,动量方程、湍动能方程均采用二阶迎风格式。对于瞬态问题,压力隐式算子分割算法(PISO)有明显的优势,故压力速度耦合方式采用PISO算法。取时间步长为0.01 s,需要求解的时间步数设定为2 000步,每个时间步长内的最大迭代次数设为20。为了保证湍流计算的收敛性和稳定性,欠松弛因子分别取为0.6、0.4、0.8、0.4、0.6、0.6、0.8.
3 数值模拟与分析
3.1 数值方法验证
应用FLUENT软件,对两栖车辆的车体绕流场进行数值模拟,得到两种湍流模型下的阻力计算值,如表1所示。根据计算数据绘制出阻力随速度变化曲线,并对比试验数据拟合曲线,如图4所示。数值模拟结果总体上与试验结果相吻合,略小于试验值。可以看出两种模型所计算出的阻力曲线的变化趋势,与试验值的变化趋势相一致。两种湍流模型都能比较好地计算车体的航行阻力,相比之下,RNG模型的计算结果与试验值更接近,误差更小。所以RNG湍流模型,更适合两栖车辆的阻力计算。误差主要是由于在数值模拟中,模型的精度不高而产生的。
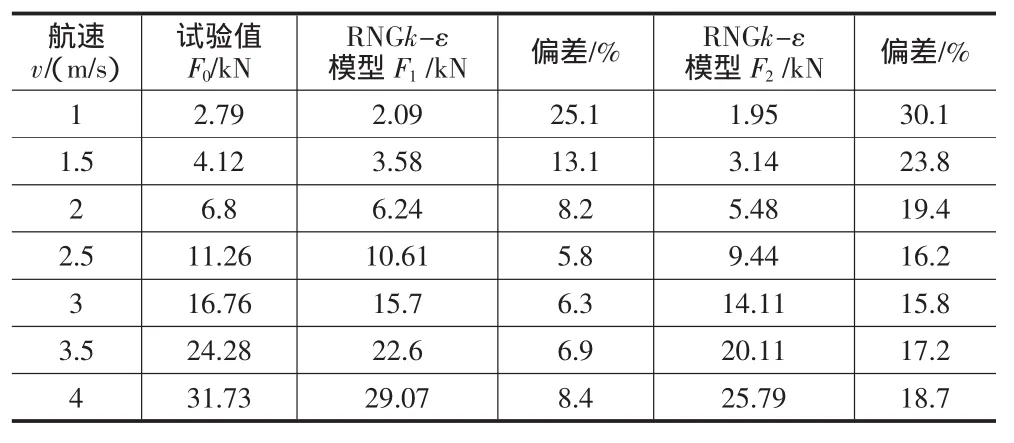
表1两种模型计算结果与试验结果比较
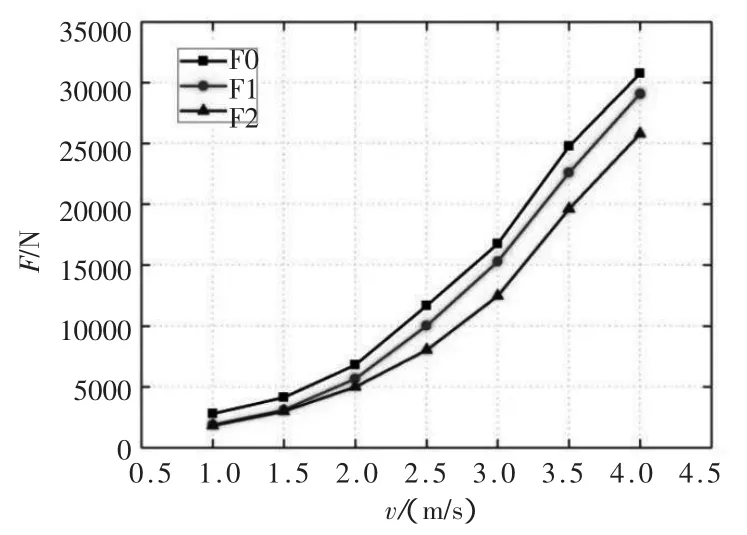
图4总阻力的模拟值与试验值
3.2 计算结果分析
通过数值模拟计算,得到了两栖车辆水中航行时的流场特性参数。可以根据需要对其进行相关水动力特性分析。图5为车体在航速v=3m/s的情况下履带前部和后部的速度矢量图。由于车体形状在此处的急剧变化,导致此处的流体运动发生了分离,并且产生了尺度较大的涡,降低了通过该处的水流速度,使得该区域压力降低,如图6动压分布所示。在车体周围形成压力差,产生较大的压差阻力。

图5 履带轮附近的速度矢量图
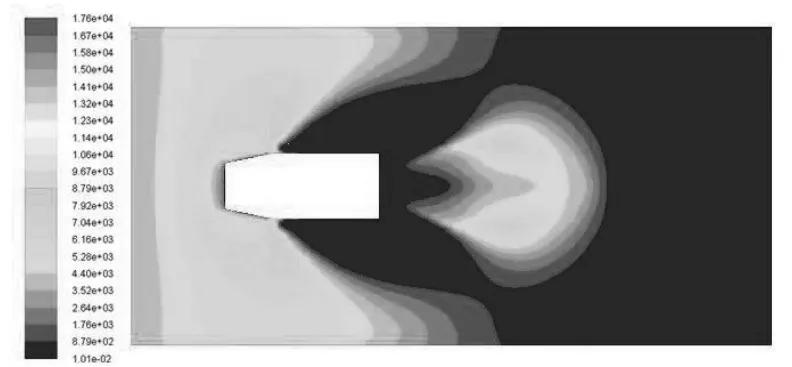
图6 动压分布云图
图7反映了车辆在4m/s航速下的兴波云图。从云图中可以看出,车体首部有一较大的波峰,在车体履带前端两侧形成波谷;车体后部由于履带的影响,向两侧扩散形成较小波峰,车体正后方处于波谷。其总体自由液面的波形刻画与车体表面动压分布相符,也接近车体航行的实际情况。从上可证明兴波阻力的大小与车体形状密切相关,对车体外形局部进行合理优化,可以提高其水上动力性能,达到减阻增速的目的。
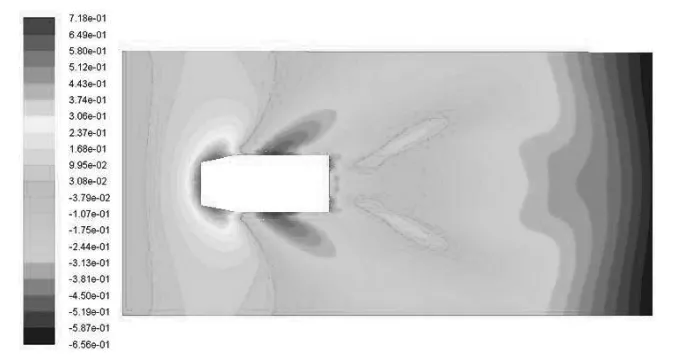
图7 航速4m/s的兴波云图
4 结束语
利用CFD计算流体力学的方法,对两栖车辆的绕流场进行数值模拟,获得其水上航行时主要的流场特性参数。模拟计算中考虑了自由液面的影响,通过VOF方法对兴波自由液面进行了追踪。采用两种湍流模型分别对装备车体绕流场进行了数值模拟,数值模拟计算出的阻力值与试验值基本吻合,比较总阻力的计算值与试验值,确定了RNG模型是更为适合两栖车辆绕流场数值模拟的湍流模型。同时,分析了车体外形对阻力的影响,找到影响其航行阻力的关键因素,为今后更高性能的两栖车辆的研制提供了参考。
[1]洪 津,高 博,王 璞,等.两栖工程作业车的发展研究[J].化学工程与装备,2010,(8):159-160.
[2]高富东,姜乐华,潘存云.基于计算流体动力学的两栖车辆水动力特性数值计算[J].机械工程学报,2009,(5):134-139.
[3]杨楚泉.水陆两栖车辆原理与设计[M].北京:国防工业出版社,2003.
[4]居乃鵕.两栖车辆水动力学分析与仿真[M].北京:兵器工业出版社,2005.
[5]赵建民,朱 军,焦志勇,等.两栖车辆水陆运动模型[J].四川兵工学报,2011,(5):11-15.
[6]韩占忠,王国玉,闫为革.两栖车辆航行粘性阻力数值分析[J].车辆与动力技术,2003,(2):6-10.