利用模拟GPS/IMU数据快速制作DOM的方法
2015-02-19韩涛,宋起,李红
韩 涛,宋 起,李 红
(1.地理信息工程国家重点实验室,陕西 西安 710054;2.西安测绘总站,陕西 西安 710054)
在航空摄影测量中,利用高精度的GPS/IMU组合定位定向系统能够获取航摄仪曝光瞬间的外方位元素(POS数据),可实现稀少控制甚至无控制点的区域网平差和后期产品制作,大大减少了外业工作量,缩短了成图周期[1]。目前,市场上主流的全数字摄影测量系统都将POS数据作为生产作业中不可或缺的重要数据。但在一些情况下,航空遥感影像缺少POS数据的支持,使生产作业无法正常进行。近年来,通过实践探索,逐步找到了解决问题的方法,为困难条件下利用已有资料进行相关作业提供了技术依据。
1 研究方法和技术路线
通常情况下,快速制作DOM的关键环节是空中三角测量成果的快速完成和DEM的及时获取。
利用全数字摄影测量工作站完成空中三角测量,获取航摄仪曝光瞬间的外方位元素[2,3],是制约工程展开、影响任务进度的关键。在无POS数据情况下,为了快速获取空中三角测量成果,必须解决初始外方位元素获取问题,模拟出相关测区的POS数据。
得到空中三角测量成果后,要想得到现势性很强的DOM成果,关键在于获取支持DOM生成的DEM数据。在模拟POS数据快速制作DOM的过程中,充分发挥原有DEM数据的作用,或直接利用,或适当修改后利用,达到快速获取DOM的目的(图1)。
2 空中三角测量
2.1 初始外方位元素解决方案
要在没有POS数据的情况下正常进行空中三角测量,需给定初始的外方位元素,即模拟POS数据的外方位元素。初始外方位元素获取包括对线元素的获取以替代GPS传感器接收的绝对方位参数;角元素的获取以替代IMU传感器生成相对方位参数和俯仰ω、侧滚φ、航偏κ旋转参数。
2.1.1 线元素的获取
线元素的获取可以从已有资料(线划图或控制资料)中推算并判读出航线首末影像主点在选定空间直角坐标系中的平面坐标,并通过内方位元素及摄影比例尺推算出航高,以获取外方位元素中的线元素。由于像主点和相片中心点基本重合,实际操作时可不加区分。
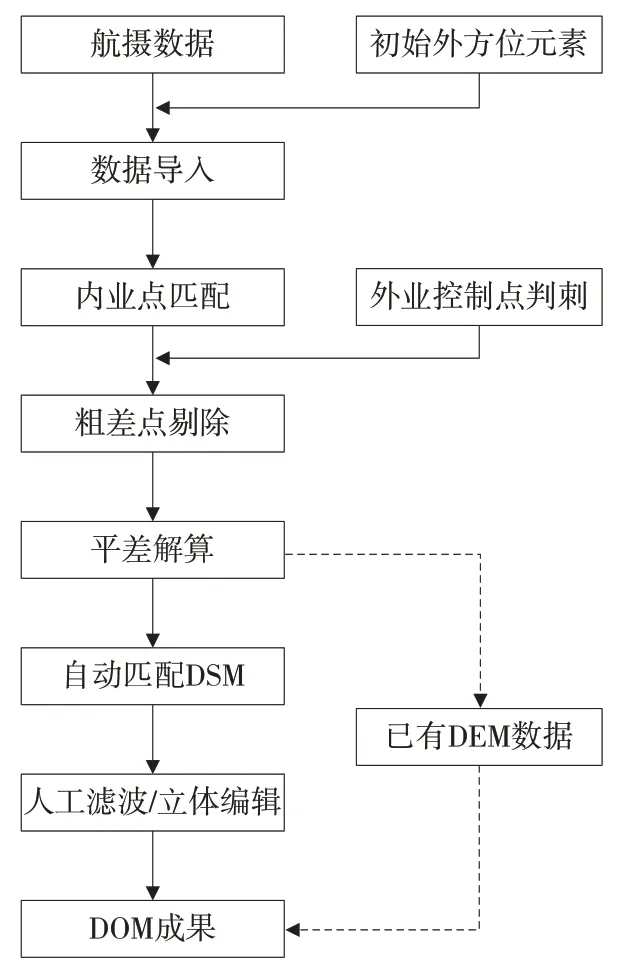
图1 数据处理流程
1)像主点在选定空间直角坐标系中平面坐标的获取。通常情况下先获取航线首末影像主点在选定空间直角坐标系中的平面坐标和摄影基线,然后根据航片之间摄影基线基本一致的技术常识[4],推算航线内部其他影像主点的平面坐标。首末影像主点在选定空间直角坐标系中平面坐标一般可以通过以下方式获取:①利用GPS实地量测,该方式是最直接也是相对准确的获取方式,但费时费力;②利用老图判点量测,该方式用时短、效率高,但易引入判读误差,精度受限;③利用已知控制点推算,通过同一个模型上的2个已知控制点A、B(如图2所示),计算2点之间距离c,并量测A、B点与影像主点C之间组成的三角形角度。通过A、B、C之间的三角关系,求得C点在选定空间直角坐标系中的平面坐标。
2个已知控制点之间距离c为:

式中,X1、X2、Y1、Y2为2个已知控制点坐标值。
其他两边距离为:

式中,A、C为两条边组成的夹角;a、c为两点间距离。根据式(1)、(2),在已知2点坐标情况下,很容易求得第3点也就是相片主点在选定空间直角坐标系中的平面坐标。该方式较方式①用时短、效率高,较方式②精度高。另外,在首末影像主点平面坐标获取有困难的情况下,也可考虑选择航线中任意2张影像的主点进行量测,进而推算出其他影像主点的平面坐标。
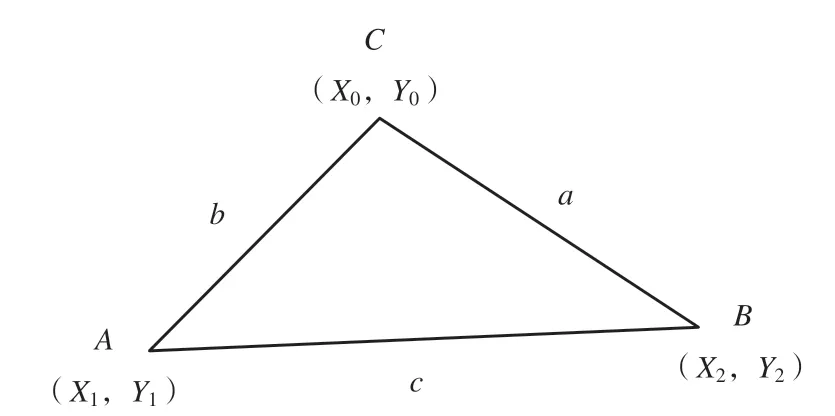
图2 控制点与相片中心点之间三角关系
2)像主点在选定空间直角坐标系中高程坐标的获取:

式中,H为航摄时飞机相对航高;f为航摄仪主距;m为航摄比例尺分母。
2.1.2 角元素的获取
模拟航拍时的俯仰ω、侧滚φ、航偏κ三个角元素,ω、φ是影像分别绕X轴、Y轴的旋转角度,也就是影像相对于基准面的平面夹角。由于上述角度在航摄时有严格控制(≤3°),这里可忽略。κ是影像绕Z轴的旋转角度,也就是航线方向与东西方向的夹角,在规则航线中,κ角度一般为0°或180°、90°或270°。但在非规则航线中,需在曝光中心点确定后,通过量测航线与东西方向的夹角,来确定κ角度,如图3所示。
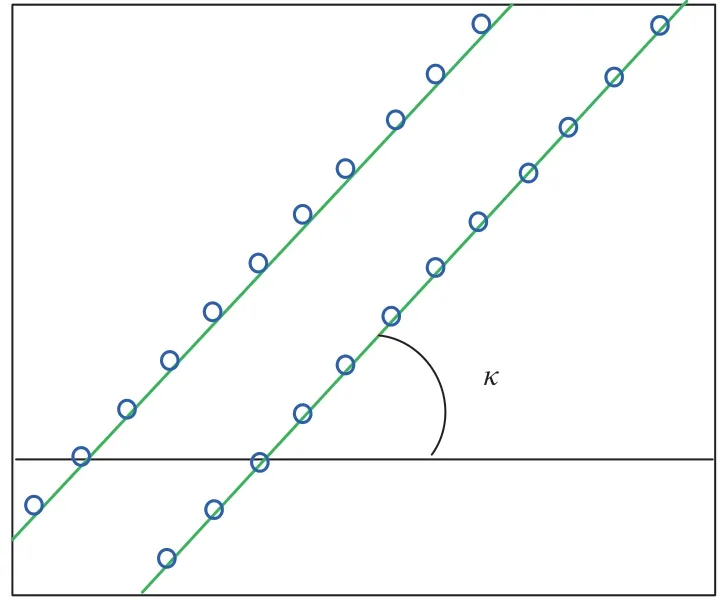
图3 非规则航线与东西方向夹角关系
2.2 内业点匹配
由于POS数据是模拟的,同航线模型之间、航线与航线之间链接较为松散,相对数学关系并不严密,所以,内业点匹配采用像方匹配或物方匹配,均存在一定局限。
1)采用像方匹配时,针对精度有限的初始外方位元素数据,需调整合适的匹配窗口、匹配策略,往往需调整到比有精确POS数据大3~5倍的搜索半径,方能匹配出内业点。
2)采用物方匹配对于POS精度要求相对较高,并且必须有外部高程数据作为参考。往往利用已知的DEM作为辅助数据,如采用全球ASTER GDEM作为参考DEM,内业点匹配在参考ASTER GDEM支持下成功率较高。
2.3 平差解算
内业点匹配完成后,即可进行粗差探测和区域网平差计算。首先需剔除粗差,将内业点匹配过程中量测质量不高的点进行挑选剔除,经过多次剔除粗差后,打开运算报告文件,查看每个点上的具体残差。如果粗差点已剔除干净(误差小于2个像素),可进行区域网平差计算。如果点上的误差不能满足要求,则应返回进行交互式量测修改,直至符合要求,再进行区域网平差计算,直到精度满足要求为止。
3 DOM制作
1)DEM获取。①DEM自动匹配。采用系统自动匹配方式实时获取,此方式模型符合较好,且格网间距可根据成果精度要求修改,通常作为DEM获取的首选方式。但受地形、植被、资料等条件限制,有的测区DEM匹配准确度不高,格网点不能切准地形表面,需要人工编辑,费时费力。②利用已有DEM成果。现在,国内大部分区域有已存档的DEM,将数据转换为和空三成果一致的坐标系统即可。对于困难地区或国外地区,可利用ASTER GDEM等数据,填补空白。③对于高程变化不明显的平地、丘陵地地形,特殊情况下,可采用读取平均高程的方法获取DEM。
2)DOM制作。制作时,可直接使用正射影像制作模块,在DEM支持下,以航空影像单片为单位,纠正生成DOM,再将各单片正射影像拼接,制作整区DOM。
4 结 语
在全数字摄影测量系统上利用模拟POS数据进行航空遥感影像DOM快速制作,通常情况下对空中三角测量成果和DEM的精度要求较低,适用于抢险救灾等类似应急测绘保障任务。该方法已在定西地震救灾等应急任务中得到了应用,取得了较为满意的效果。
[1]王之卓.摄影测量原理[M].武汉:武汉大学出版社,2007
[2]宁津生,陈俊勇,李德仁,等.测绘学概论[M].武汉:武汉大学出版社,2008
[3]张剑清,潘励,王树根.摄影测量学[M].武汉:武汉大学出版社,2009
[4]孙家炳.遥感原理应用[M].武汉:武汉大学出版社,2009
[5]袁修孝.GPS辅助空中三角测量原理及应用[M].北京:测绘出版社,2001
[6]王铁军,郑福海,王俊杰.IMU/DGPS辅助空中三角测量精度分析[J].地理信息世界,2009,6(4):47-50
[7]蔡文惠,梁国华.IMU/DGPS辅助航空摄影测量应用探讨[J].测绘通报,2009,54(4):41-43
