大流量2D伺服阀新型控制器的研究
2015-02-19阮健,崔凯,李胜
阮 健,崔 凯,李 胜
(浙江工业大学 特种装备制造与先进加工技术教育部重点实验室,浙江 杭州 310014)
大流量2D伺服阀新型控制器的研究
阮健,崔凯,李胜
(浙江工业大学 特种装备制造与先进加工技术教育部重点实验室,浙江 杭州 310014)
摘要:介绍了一种新型的2D阀的控制器.2D伺服阀采用伺服螺旋机构实现阀芯的角位移转化成阀芯的轴向位移,阀芯的旋转运动由一步进电机来驱动,阀腔内产生的压力差推动阀芯的轴向运动.该控制器以基TMS320F2812DSP芯片的空间电压矢量调制技术为基础,以PWM功率放大电路和A/D采样电路作为基本硬件组成.该控制器的软件部分由C语言编写的控制程序组成.结合给出的系统流程图,搭建实验平台并对该控制器性能进行测试.实验结果表明该控制器具有良好的性能。
关键词:TMS320F2812;1 000 L/min 2D伺服阀;空间电压矢量调制
The study of new controller for 1 000 L/min 2D servo valve
RUAN Jian, CUI Kai, LI Sheng
(Key Laboratory of Special Purpose Equipment and Advanced Manufacturing Technology, Ministry of
Education, Zhejiang University of Technology, Hangzhou 310014, China)
Abstract:This paper presents a novel 2D valve controller. The 2D servo valve using servo screw mechanism converts angular displacement of the spool into axial displacement of the spool. The axial displacement of the spool is controlled by pressure difference in the valve chamber because of servo-screw mechanism and the rotary motion is actuated by a stepper motor. The controller is based on the Space Vector Pulse Width Modulation technology of the TMS320F2812. Its hardware circuit is composed by the PWM power amplifier circuit and A / D sampling circuit. Software part of the controller is composed by the C language program. Combined with the system flow chart, experimental platform to test the performance of the controller. Experimental results show that the controller has a good performance。
Keywords:TMS320F2812; 1 000 L/min 2D valve controller; space vector pulse width modulation
改革开放以来,我国工业现代化尤其是电液伺服技术正迅速发展,尤其在高精度、重载的系统中.加之现代计算机技术的快速发展,使得电液伺服技术的发展空间得到了进一步的扩大,尤其是在航空航天领域.电液伺服系统中,伺服阀的控制精度直接影响整个系统的精度,所以伺服阀的控制可以说是整个液压系统控制的核心.采用2D阀的结构方案,2D阀具有结构简单、抗污染能力强的优点.为使该2D阀达到设计要求,采用空间电压矢量调制技术并在此基础上引入位置闭环和电流闭环控制.采用数字信号处理器TMS320S2812作为控制器并运用连续跟踪算法[1]通过控制电-机械转换器可以实现对阀芯的精确控制,理论分析与实验结果表明,该控制器具有良好的性能。
12D伺服阀的工作原理
2D伺服阀的结构如图1所示,2D阀主要由阀芯阀体组成,2D阀的由来是因为阀芯可以在阀体内完成水平和旋转两种运动.在阀芯上开有与右腔连通的3,4两孔,从而保证右腔压力与P口保持一致.将左腔的面积设计为右腔面积的两倍,阀芯左端开有高低压孔,其中高压孔与3,4两孔相通,低压孔与T口相通,在静态时若不考虑摩擦力及阀口液动力的影响,左腔压力为系统压力P的一半,在稳态液动力的影响下,阀芯轴向保持静压平衡,与螺旋槽(阀体上)相交的高低压侧的弓形面积相等.当以逆时针的方向转动阀芯,则高压侧的相交面积增大、低压侧的相交面积减小,左腔压力升高,并推动阀芯向右移动,同时低压孔又回到螺旋槽的两侧,处于高低压侧相交面积相等的位置,左腔的压力恢复为系统压力的一半,从而保持平衡;若顺时针的方向转动阀芯,变化则正好相反,阀芯向左移动.因阀芯具有双自由度运动,故称该阀为2D阀[2]。

图1 2D伺服阀结构原理Fig.1 The principle structure of 2D servo valve
2SVPWM调制算法
SVPWM以平均值等效原理为理论基础,在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等.在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到.两个矢量的作用时间在一个采样周期内分多次施加从而控制各个电压失量的作用时间,使电压空间矢量接近圆形轨迹,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM波[3].逆变电路如图2所示,由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,定义开关函数Sx(x=a,b,c)为

图2 三相逆变电路Fig.2 The three-phase inverter circuit

(1)
(Sa,Sb,Sc)的全部可能组合共有8种,包括6个非零矢量U1(001),U2(010),U3(011),U4(100),U5(101),U6(110)和两个零矢量U0(000),U7(111).8个基本电压空间矢量的位置和大小如图3所示,通过8个电压空间矢量的线性组合即逆变器各个开关的开关时间和顺序来控制逆变器的输出电压组合从而形成多边形电压矢量轨迹,最终获得圆形旋转磁通实现SVPWM调制。

图3 电压空间矢量Fig.3 The voltage space vector
3实现方案

图4 基于TMS320F2812的三相步进电机的控制系统框图Fig.4 The control system block diagramof three-phase stepper motor based on TMS320F2812
基于TMS320F2812的三相步进电机的控制系统框图,如图4所示.给定电机转子位置信号并由位置信号产生两路相位相差120°的电流信号,电流信号经过CLARKE和PARK变换后,与电机的采样电流经过变换后的数值进行PID调节,实现对电机的磁场和转矩的实时控制.同时给定的位置信号,与电机后面的角位移传感器反馈回来的位置信号进行位置闭环.由于本系统中同时引入了位置和电流闭环,所以可以高效率,高精确度的控制电机。
4系统总体设计
4.1系统硬件组成
2D伺服阀控制器的硬件电路组成,如图5所示,主要由电源电路,控制信号输入接口,2812处理器最小系统,PWM功率输出电路和电流检测模块等组成.该控制器设计3路PWM功率放大电路分别控制步进电机的三相电流从而控制阀芯的运动。
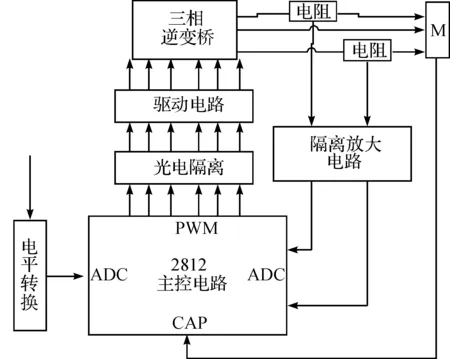
图5 2D伺服阀控制器组成框图Fig.5 The block diagram of 2D servo valve controller
4.2硬件电路设计
4.2.1PWM功率放大电路
本控制器的PWM信号由2812的PWM信号输出引脚输出,其中一路PWM功率放大电路如图6所示.该电路由2个MOSFEI(Q9和Q11为IRF640N)组成半H桥电路,对步进电机线圈两段电压进行调制,从而控制输出电流的大小.其中隔离电路由2个高速光耦合器(6N137)组成,驱动电路采用IR2110S来驱动MOSFEI[4]。
4.2.2电流采样电路
电流闭环控制有利于提高放大器增益的稳定性,减少放大器的失真等.由于三相电机的三相电流之和为零,所以只要采样出两路电流信号,另外一路可由ia+ib+ic=0算出.对应图6的电流采样电路,如图7所示.采样电阻R71对B相电流进行采样,经过隔离运放HCPL7800,和LF412放大并经OP07偏置后接入2812的A/D引脚,实现电流闭环。
4.3软件设计
控制程序采用C语言按照功能模块分别编写,主要包括系统初始化模块,中断初始化模块,事件管理器初始化模块和A/D初始化模块等[5]如图8所示.其中初始化是指DSP运行以前的状态,包括:
1) 设置系统时钟,CPU时钟为30M锁相环使能,关闭看门狗,初始化各个I/O口。

图6 PWM功率放大电路Fig.6 The power amplifier circuit of PWM

图7 电流采样电路Fig.7 The circuit of current sampling

图8 控制软件工作流程图Fig.8 The control software of work flow chart
2) 设置事件管理器模块,初始化定时器,设置比较模式,6相PWM输出。
3) A/D采样初始化,选择采样通道,对ADFIFO清零。
系统开始时先对系统模块、中断模块、A/D模块以及事件管理器模块进行初始化设置,然后读取由信号发生器发出的角位置控制信号,经过DSP内部处理将控制信号首先转换为3路互差120°的电流信号,经过PARK和CLARKE变换后与实际信号经PID运算后得到Uα和Uβ并判断位置信号所处扇区,在扇区内计算各向量所作用的时间,将时间的值赋给系统比较寄存器,进而控制产生PWM波,对位置信号进行调节。
5实验结果分析
为了研究大流量2D伺服阀的动态特性,搭建试验平台,如图9所示,试验系统包括液压系统、数字阀控制器、无接触式磁感应位移传感器、激光位移传感器、示波器信号发生器。
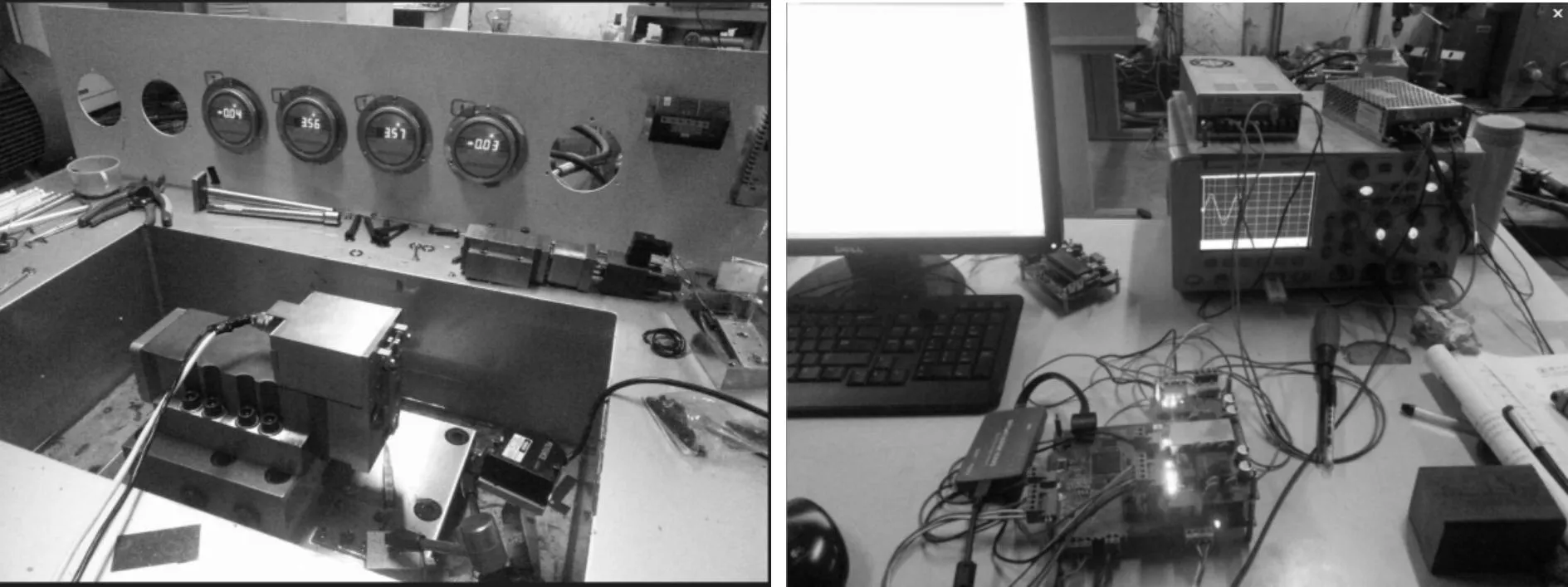
图9 实验系统图Fig.9 The diagram of ware of the experimental system
信号发生器输出的波形信号与步进电机转子位置信号经数字阀控制器驱动步进电机输出小幅度的角位移,从而驱动阀芯旋转,再通过伺服螺旋结构转化为阀芯的轴向位移阀芯的轴向位移[6].由激光位移传感器测得显示在示波器上.这样可以得到在不同幅值和频率的波形信号作用下的阀芯位移响应曲线[7-8]。
根据以上分析制作出控制器,并对电-机械转换器进行实验验证.本实验采用的电-机械转换器为富春电机有限公司生产的FL573P79-5801A型三相步进电机.此电机的相电阻为1.05 Ω,相电流为5.8 A,相电压为6 V.在25%阀开口幅值条件下,测得2D伺服阀在不同频率正弦信号作用下的频率响应,如图10(a~d)所示(图中实线为控制信号,虚线为阀芯位移).从图10可以看出:2D伺服阀在低频段具有良好的跟踪特性,表明其具有良好的静态特性.根据不同频率正弦信号下频率响应可以得到2D伺服阀的频率特性,如图11(a,b)所示.从图11可以看出:该2D阀在120Hz时,相位滞后约90°,对应衰减-3 dB。
6结论
采用基于DSP2812的空间电压矢量调制技术,并配合外围的PWM功率放大电路以及A/D采样电路,完成了大流量2D伺服阀控制器的基本硬件电路.电流和位置双闭环系统增加了系统的控制精度,实现了对三相混合式步进电机的精确控制从而进一步实现了对2D伺服阀的控制.实验结果表明:该2D阀在100 Hz时,相位滞后约90°,-3 dB对应的频宽约为150 Hz,控制器具有良好的性能。

图10 不同频率正弦信号下的频率响应Fig.10 Frequency response under different frequency sinusoidal signal

图11 频率特性图Fig.11 The diagram of frequency characteristic
参考文献:
[1]李胜.2D伺服阀数字控制的关键技术的研究[D].杭州:浙江工业大学,2011。
[2]邢彤,左强,杨永帅,等.液压激振技术的研究进展[J].杭州:浙江工业大学学报,2012.23(3):362-367。
[3]CUI Jian, DING Fan, LI Qipeng. Novel bidirectional rotary proportional actuator for electrohydraulic rotary valves[J]. IEEE Transactions on Magnetics,2007,43(7):254-258。
[4]范心明.基于SIMULINK的SVPWM仿真[J].电气传动自动化,2009,31(3):19-21。
[5]张凯.1 000 L/min 2D数字伺服阀的设计及其关键技术研究[D].杭州:浙江工业大学,2013。
[6]王晓旭.用于DSP的事件管理器的研究与设计[D].沈阳:沈阳工业大学,2013。
[7]邹正佳,李胜,阮健,等.2D数字伺服阀的动态特性试验研究[J].浙江工业大学学报,2011.39(4):429-432。
[8]刘乃新,阮健,裴翔.一种2D三通数字伺服换向阀的理论和实验研究[J].浙江工业大学学报,2010.38(4):396-400。
(责任编辑:陈石平)
中图分类号:TH137
文献标志码:A
文章编号:1006-4303(2015)02-0154-05
作者简介:阮健(1963—),男,福建福安人,教授,博士生导师,研究方向为电液控制,E-mail:yanyan333@126.com。
基金项目:国家自然科学基金资助项目(51375445);浙江省自然科学基金资助项目(LZ13E050002);浙江省重点科技创新团队(2011R50011)
收稿日期:2014-09-16
