单滑块变质心非对称再入飞行器建模及控制
2015-02-18王林林于剑桥王亚飞苏晓龙
王林林, 于剑桥, 王亚飞, 苏晓龙
(北京理工大学宇航学院, 北京 100081)
单滑块变质心非对称再入飞行器建模及控制
王林林, 于剑桥, 王亚飞, 苏晓龙
(北京理工大学宇航学院, 北京 100081)
摘要:针对单个滑块控制的非对称再入飞行器,采用“隔离法”的建模思路,将滑块和外部壳体分别作为研究对象,建立了非对称再入飞行器七自由度非线性动力学模型。在此基础上,对单滑块控制的非对称再入飞行器的动力学特性进行了详细的分析,提出了滚转控制方案。在对非线性模型进行合理简化的基础上推导了传递函数,并采用标准系数法对控制系统参数进行了设计。最后,通过数学仿真结果验证了动力学模型的准确性和控制方案的可行性。
关键词:变质心滚转控制; 再入飞行器; “隔离法”建模; 标准系数法
0引言
变质心控制作为一种新颖的控制方式,相对于传统的控制方式,其执行机构在弹体内部,避免了气动舵面控制方案存在的舵面烧蚀问题,使飞行器保持了良好的气动外形,因而成为近年来大气层内高超声速控制领域研究的热点问题之一[1-2]。
变质心控制的基本原理是通过移动滑块实现对系统质心位置的改变,从而改变气动力相对于系统质心的力矩,进而控制飞行器的姿态变化。美国在变质心控制领域起步较早,文献[3-4]早在20世纪70年代末就研究了内部无控的活动质量体对旋转弹角运动的影响[3-4]。近年来,Rogers在Murphy研究的基础上主动控制弹体内部活动质量体实现对弹体姿态的调整[5-7]。而俄罗斯在变质心控制研究方面已达到了工程应用水平,近年来研制的“白杨-M”远程洲际导弹就采用了变质心控制技术。“白杨-M”通过移动铀238核装置位置改变弹头质心实现弹道机动,并且具有很好的突防精度。目前,变质心控制技术已经发展到固定翼飞机姿态控制[8]、平流层飞艇的姿态复合控制[9]、水下航行器控制[10]、反导系统动能拦截[11]、火星飞船的着陆控制[12]等诸多领域。
当前,国内对该技术的研究还处于起步阶段,存在很多需要解决的问题。本文针对单滑块控制的非对称再入飞行器,采用“隔离法”的建模思路,相对于“整体法”将滑块和壳体组成的系统作为研究对象[13-14],“隔离法”分别研究了滑块和壳体,分析了弹体质心移动和弹体转动形成的交联运动下滑块和外部壳体之间的相互作用关系,所建立的动力学方程物理意义更加明确,利于对模型的进一步分析处理和姿态控制系统设计。通过对动力学模型的分析和简化,得到了滚转通道传函模型。最后,采用标准系数法对控制器参数进行了设计和优化,并通过仿真验证了所建立的动力学模型的准确性以及标准系数法设计的控制器的鲁棒性。
1动力学建模
1.1坐标系及变量定义
地面坐标系Axyz,与地球表面固连的坐标系。坐标系原点A选取在导弹发射点上;Ax轴为弹道面与水平面的交线,指向目标为正;Ay轴沿垂线向上,Az轴与其他两轴垂直并构成右手坐标系。将地面坐标系作为惯性坐标系,不考虑地球自转和曲率的影响。弹道坐标系Ox2y2z2,原点O取在壳体的质心上;Ox2轴与导弹的速度矢量vo重合;Oy2轴位于包含速度矢量vo的铅垂面内垂直于Ox2轴,指向上为正;Oz2轴垂直于其他两轴并构成右手坐标系。弹体坐标系Ox1y1z1(壳体坐标系),原点O取在壳体的质心上;Ox1轴与弹体纵轴重合,指向头部为正;Oy1轴位于弹体纵向对称面内与Ox1轴垂直,指向上为正;Oz1垂直于Ox1y1平面,方向按右手坐标系确定。速度坐标系Ox3y3z3,坐标原点取在壳体质心上,Ox3轴与壳体质心的速度矢量vo重合;Oy3轴位于弹体纵向对称面内与Ox3轴垂直,指向上为正;Oz3垂直于Ox3y3平面,其方向按右手直角坐标系确定。

1.2建立动力学方程组
本文采用“隔离法”建模思路,以滑块作为研究对象。通过计算滑块在惯性坐标系下的加速度,得到滑块在惯性坐标系下的受力情况。由作用力与反作用力定理,可以得到滑块对弹体的作用力。不对称再入飞行器的侧视图和后视图分别如图1和图2所示,某一时刻滑块的运动状态简图如图3所示。
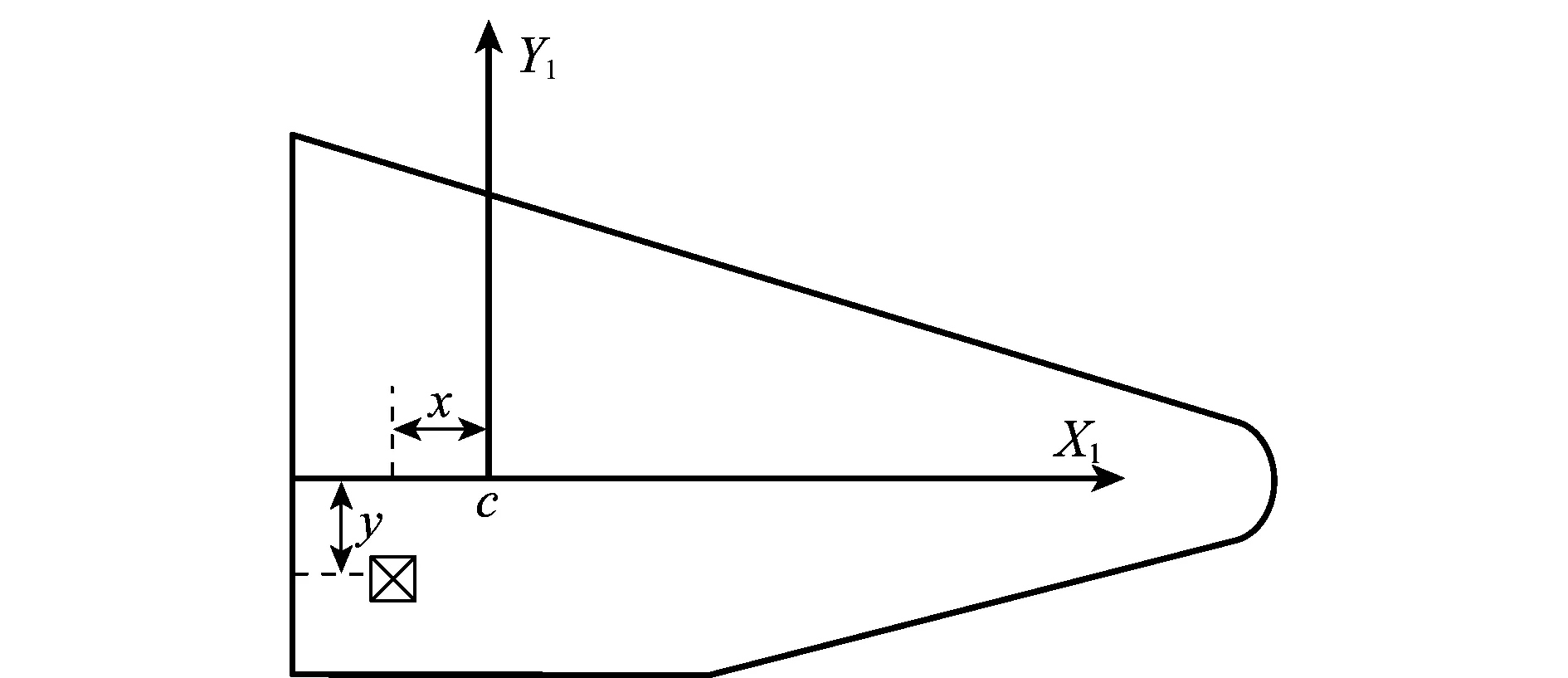
图1 不对称再入飞行器侧视图
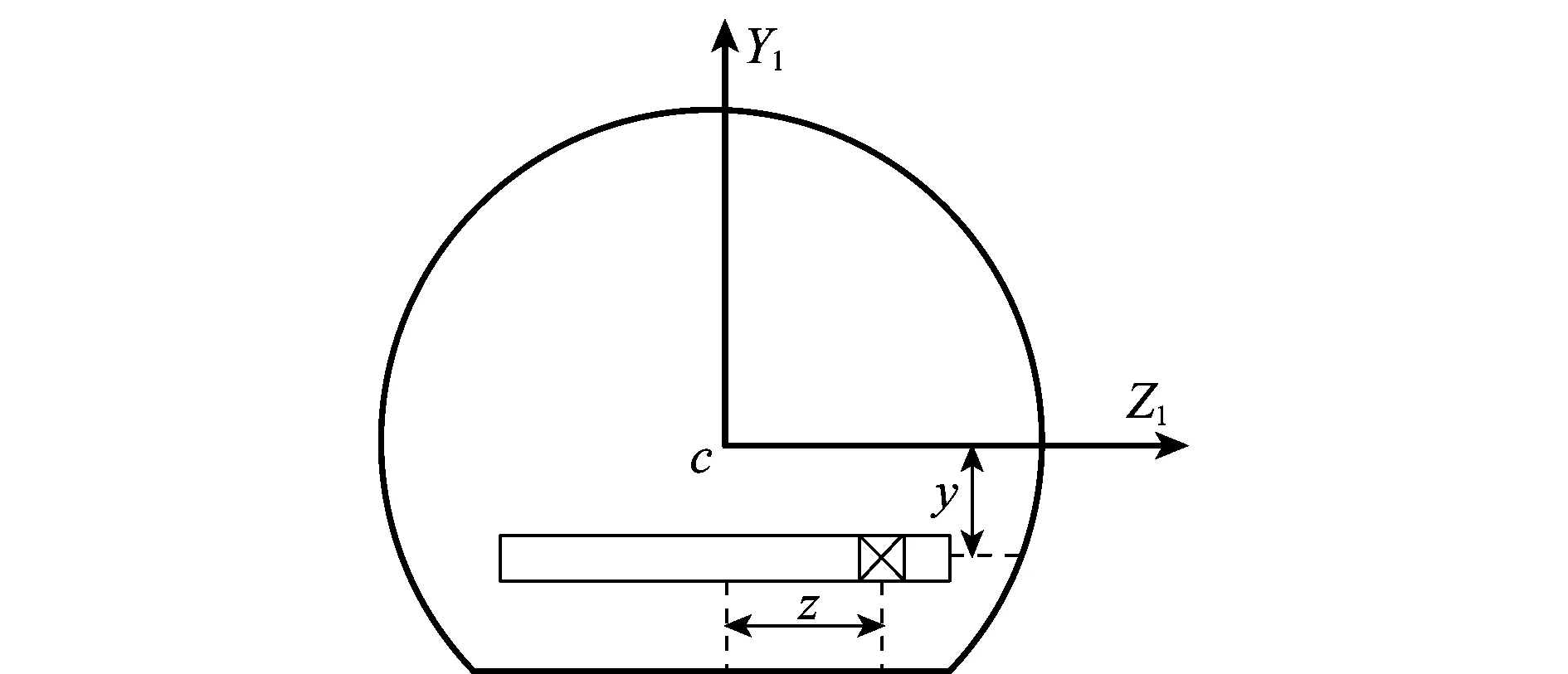
图2 不对称再入飞行器后视图
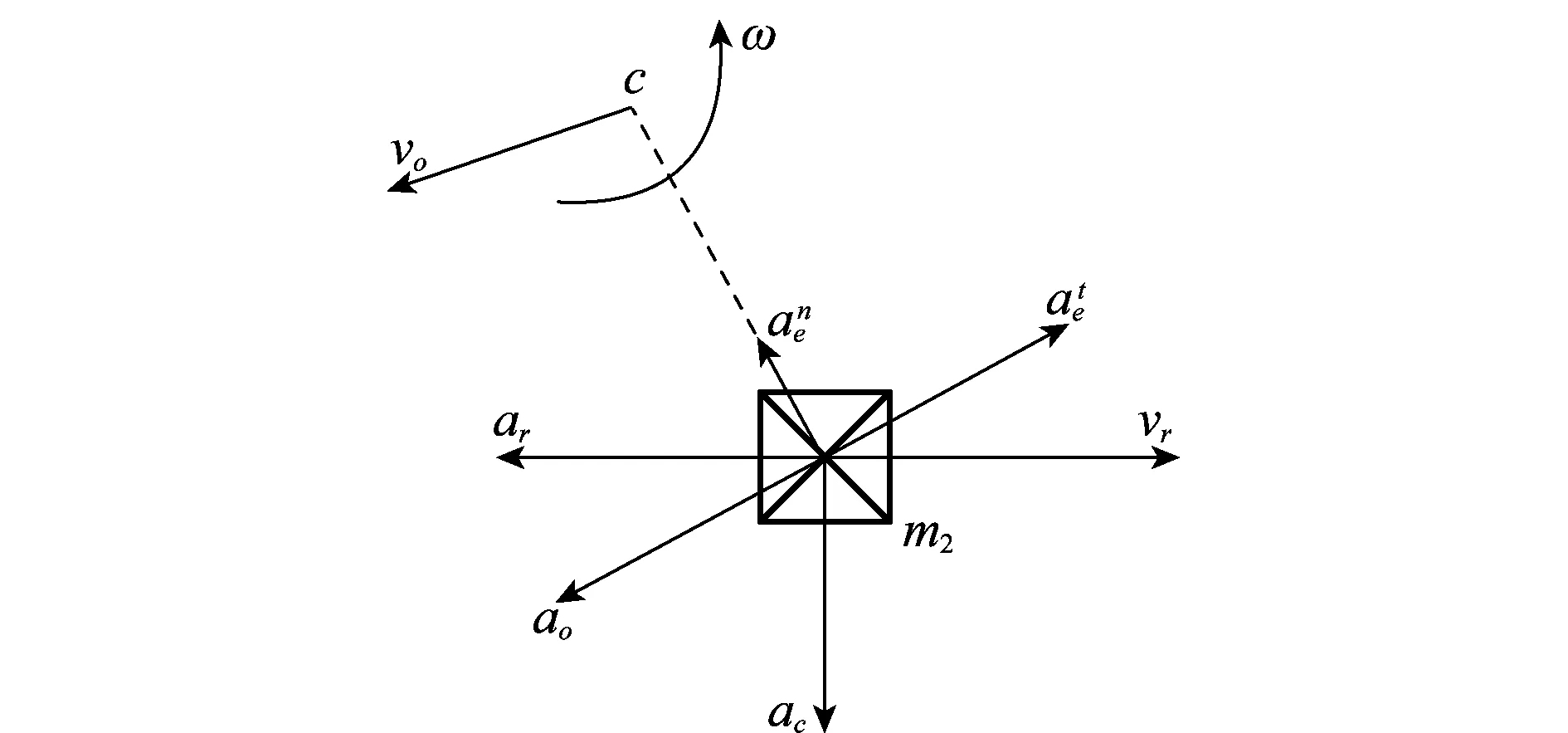
图3 某一时刻滑块的运动状态简图
在弹体质心移动和弹体转动形成的交联运动下,滑块运动可以分解为随同弹体的牵连运动e和相对于弹体的相对运动r。
(1)
式中,ve=vo+ω×r。
对时间t一阶绝对导数
(2)
式中
最终得到滑块在交联运动下的合加速度
(3)
式中,ac=2ω×vr为由于牵连运动使得相对速度的方向在惯性坐标系中发生改变而产生的附加加速度。
将滑块在惯性坐标系下的绝对加速度分解到弹体坐标系下,有
(4)
式中,ax1,ay1,az1分别为a在壳体质心坐标系各轴上的分量;aox1,aoy1,aoz1为壳体质心的加速度在壳体质心坐标系各轴上的分量。
由此,可以得到滑块受到的合外力在弹体坐标系各轴上的分量为
(5)
式中
Fx2,Fy2,Fz2为壳体对滑块的作用力在弹道坐标系Ox2y2z2各轴上的分量
(6)
式中,LT(γv)、LT(α,β)分别为速度坐标系到弹道坐标系和弹体坐标系到速度坐标系的转换矩阵。
壳体质心运动的动力学方程(在弹道坐标系下)为
(7)
壳体绕质心转动的动力学方程(在壳体质心坐标系下)为
(8)
(9)
(10)
通过对动力学方程以及飞行器结构形式的分析可得,所研究的非对称再入飞行器动力学模型具有如下的特点。
非对称外形使飞行器稳定飞行条件下产生固定配平攻角,可以通过移动滑块改变弹头质心,利用气动配平力矩,控制弹头飞行姿态。单个滑块与弹体坐标系Oz1轴平行运动,对俯仰、偏航通道基本无法施加控制,故考虑通过控制滚转通道实现对弹道的控制。
由于再入飞行器的面对称外形,其升力方向始终位于弹体纵向对称平面内。通过滚转通道控制弹体滚转角可以控制升力的指向,实现机动飞行。
1.3动力学方程组线性化
为了分析滑块与外部壳体姿态运动之间的关系,对动力学方程组做以下的假设。
(1) 采用固化原理,在研究的瞬间,忽略导弹的挠性,把变质量的导弹视为刚体,导弹质量、转动惯量、速度、大气参数视为常数。
(2) 忽略地球引力和地球自转角速度的影响。
(3) 整个飞行过程中攻角α和侧滑角β均视为小量。
对动力学方程组式(7)和式(9)进行线性化之后可得
俯仰通道
(11)
偏航、滚转通道
(12)
式中,各动力系数定义如下:
忽略耦合项,对方程组式(11)和式(12)进行拉氏变换可得
(13)
以Δz(s)为输入量,Δωx(s)为输出量的传递函数可表示为
(14)
展开后可得
(15)
式中
忽略偏航、滚转通道第3个式子中除Δωx和Δz之外的变量,则可得滚转通道传递函数为
(16)
2控制器设计
2.1标准系数法
标准系数法是基于代数计算方法的控制系统设计法,简化了控制系统回路设计过程,其本质是特征多项式系数的标准化[15-17]。如果系统的闭环传递函数有如下的形式:
(17)
设
式(17)中的系数Ai(i=0,1,…,n)称作标准系数,其中A0=An=1。若选择标准系数的取值满足表1,则式(17)所表示的系统的响应特性良好。
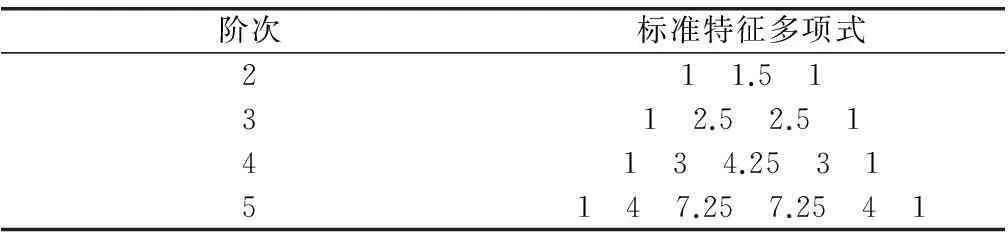
表1 闭环系统标准特征多项式系数
2.2控制器参数设计
导弹滚转通道的简化模型如图4所示。

图4 滚转通道结构图
决定系统动态性能的参数值是ω0,取ω0=10,由标准系数法求得,K1=0.571 4,K2=0.082 9,进行仿真验证,系统单位阶跃响应曲线图如图5所示。

图5 系统单位阶跃响应曲线
超调量2.83%,响应时间0.625s,稳态误差为零,表明标准系数法设计的控制器参数保证了系统具有良好的动态响应特性。
对于严重非线性、强耦合及时变性的系统,国内外学者在飞行控制系统设计方面做了大量有益的尝试,尽管不同方法在一定程度上解决了姿态跟踪控制问题,但是对于大空域飞行的高速再入飞行器,目前还没有突破性的研究成果[18]。
变质心再入飞行器滚转通道动力学方程具有时变性的特点,其控制系统参数必须为时变才能保证控制性能。而滚转控制系统的反馈量又相对较多,对于这类多回路的控制系统,如果采用传统的根轨迹法和对数频域法,计算量会很大,而且难以同时确定多个参数。而采用标准系数法,根据性能指标要求,列出代数方程,就可以得到控制器参数,在减小计算量的同时保证期望的控制性能要求。
本文采用标准系数法在一定程度上解决了系统时变性的问题,标准系数法在保证控制性能的同时更加易于工程应用。
与轨迹线性化控制方法[19-20]进行对比仿真,结果如图6~图8所示。
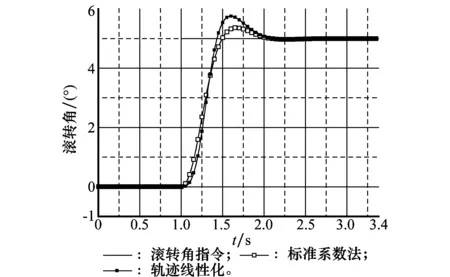
图6 跟踪阶跃指令对比曲线
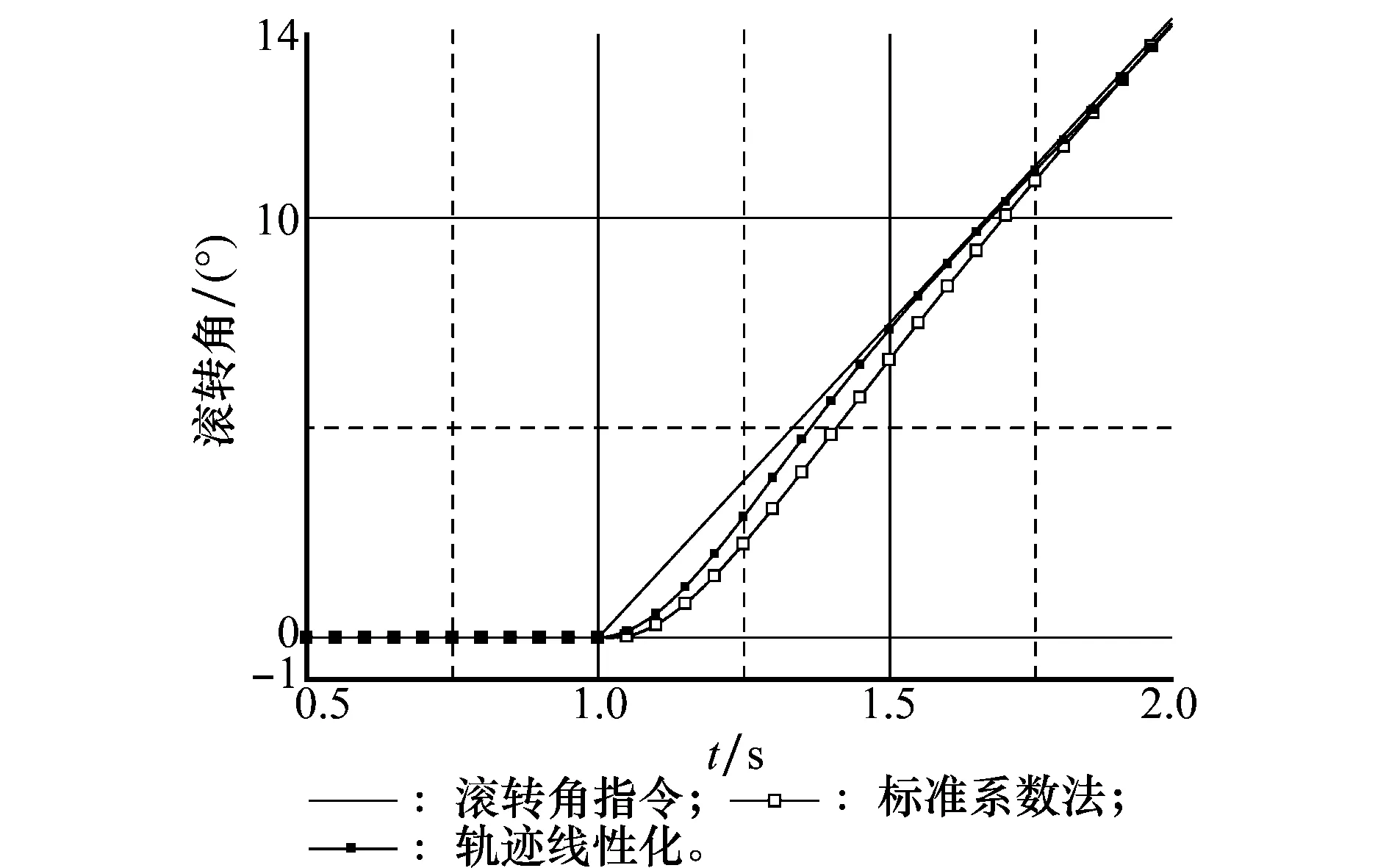
图7 跟踪斜坡指令对比曲线

图8 跟踪正弦指令对比曲线
图6~图8分别对比了标准系数法和轨迹线性化方法设计的控制器对阶跃指令、斜坡指令和正弦指令的响应曲线。可以看出,虽然轨迹线性化方法采用了复杂的数学模型并且观测了更多系统的状态量,但是标准系数法在跟踪斜坡指令、正弦指令时,与其效果相当;而对阶跃指令的响应则略优于轨迹线性化方法。
3仿真分析
3.1验证模型的准确性
下面给出系统的一些开环响应曲线(见图9~图15),以验证所建立的动力学和运动学系统的合理性和有效性。
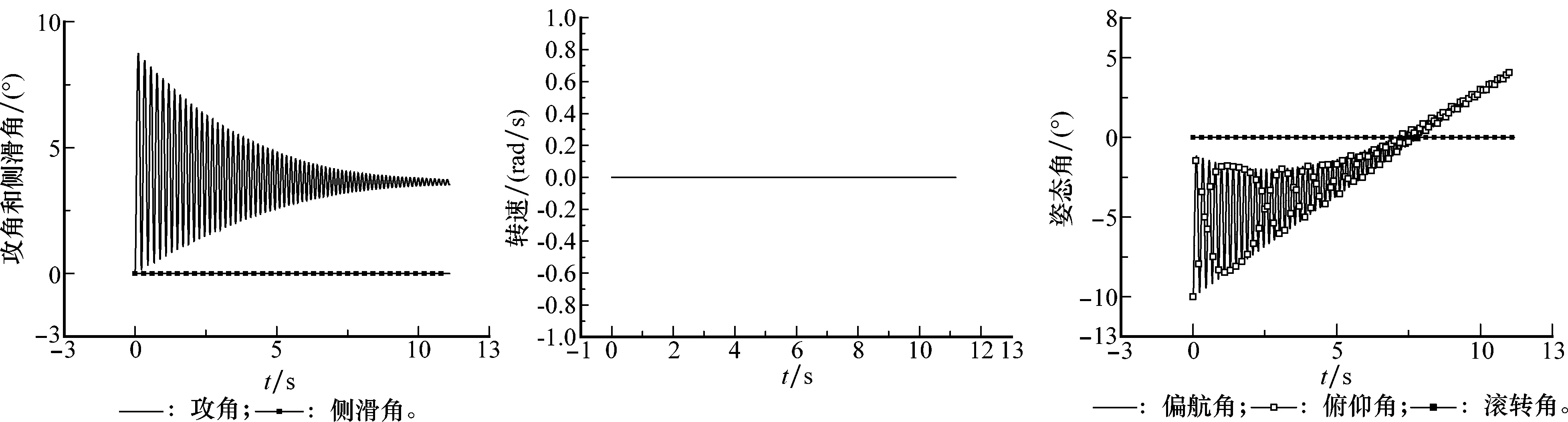
图9 滑块偏移量0时的攻角、侧滑角曲线 图10 滑块偏移量0时的转速曲线 图11 滑块偏移量0时的姿态角曲线

图12 滑块偏移量0.01 m时的攻角、侧滑角曲线 图13 滑块偏移量0.01 m时的转速曲线 图14 滑块偏移量0.01 m时的滚转角曲线
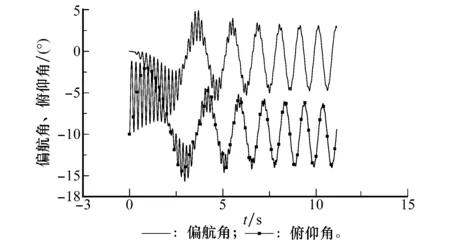
图15 滑块偏移量0.01 m时的偏航角、俯仰角曲线
图9~图15给出了再入过程中系统七自由度非线性仿真的部分结果。仿真中不考虑制导和控制系统。为了保证仿真结果的正确性,分别将滑块偏移量设置在0位和偏移0.01 m这2种情况。从图9~图11中可以看出,当滑块偏移量为0时,在系统静稳定性的作用下,攻角震荡且逐渐收敛到配平攻角。由于滑块不偏移,滚转通道和偏航通道无姿态响应,侧滑角、偏航角、滚转角保持在0。
从图12~图15可以看出,当滑块发生微小偏移时,弹体开始旋转,由于通道间存在耦合,偏航通道出现姿态变化,侧滑角震荡并逐渐收敛到0。由于弹体保持配平攻角并且旋转,俯仰角和偏航角保持在固定值附近震荡。
图9~图15中的开环仿真结果与实际的物理系统的变化规律是一致的,验证了动力学模型的准确性。
3.2综合性能验证
基于第1节的动力学建模和第2节的控制器设计,通过六自由度数学仿真分析单滑块变质心控制的特点和控制性能。
仿真部分初始条件设置为:再入弹头初始位置(0,30 000 m,0),目标位置(75 000 m, 0, 0);初始弹道倾角-19°,初始弹道偏角0°,初始攻角-1.5°、初始侧滑角0°;导弹初始速度7 500 m/s,各通道初始转速都为0;滑块偏移距离限幅0.2 m,等效控制执行机构的二阶环节ζ=0.7,ωn=10 rad/s。仿真结果如图16~图25所示。
从图16~图19可以看出,在整个飞行过程中,滚转角跟踪误差都保持在很小的范围内,具有较高的控制精度。在弹道末段跟踪误差稍微偏大,主要因为舵机的带宽偏低而末段转速较高,滚转角指令变化较快。另外,对滑块位移的限幅也是重要原因。
从图19可以看出,除了开始阶段滑块位移变化比较剧烈之外,全弹道的大部分时间,滑块的位移都在平衡位置附近小范围震荡。

图16 全弹道的滚转角变化曲线 图17 滚转角跟踪误差 图18 全弹道的转速变化曲线
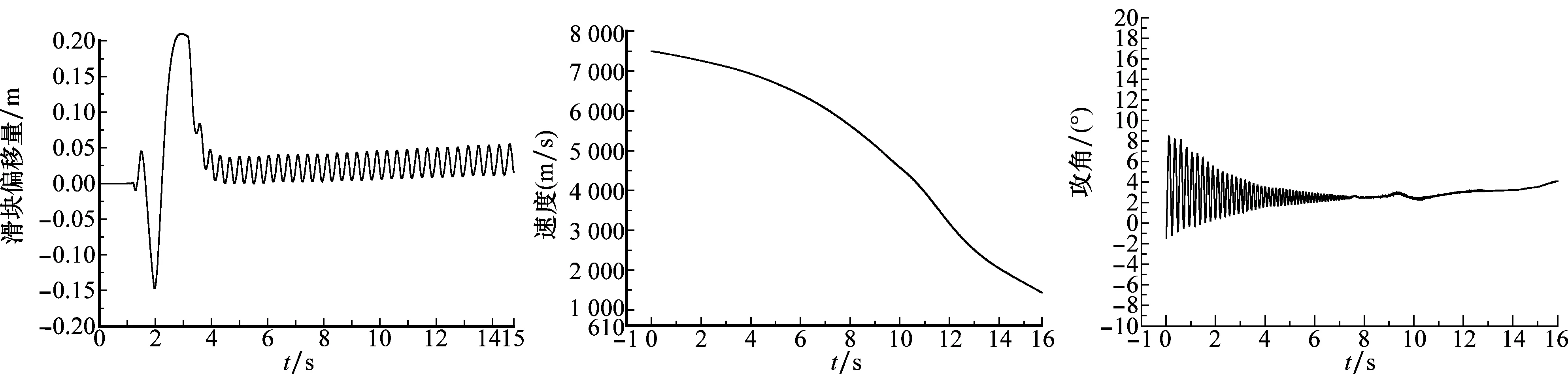
图19 滑块的偏移量 图20 速度变化曲线 图21 攻角变化曲线

图22 侧滑角变化曲线 图23 弹道倾角变化曲线 图24 弹道偏角变化曲线
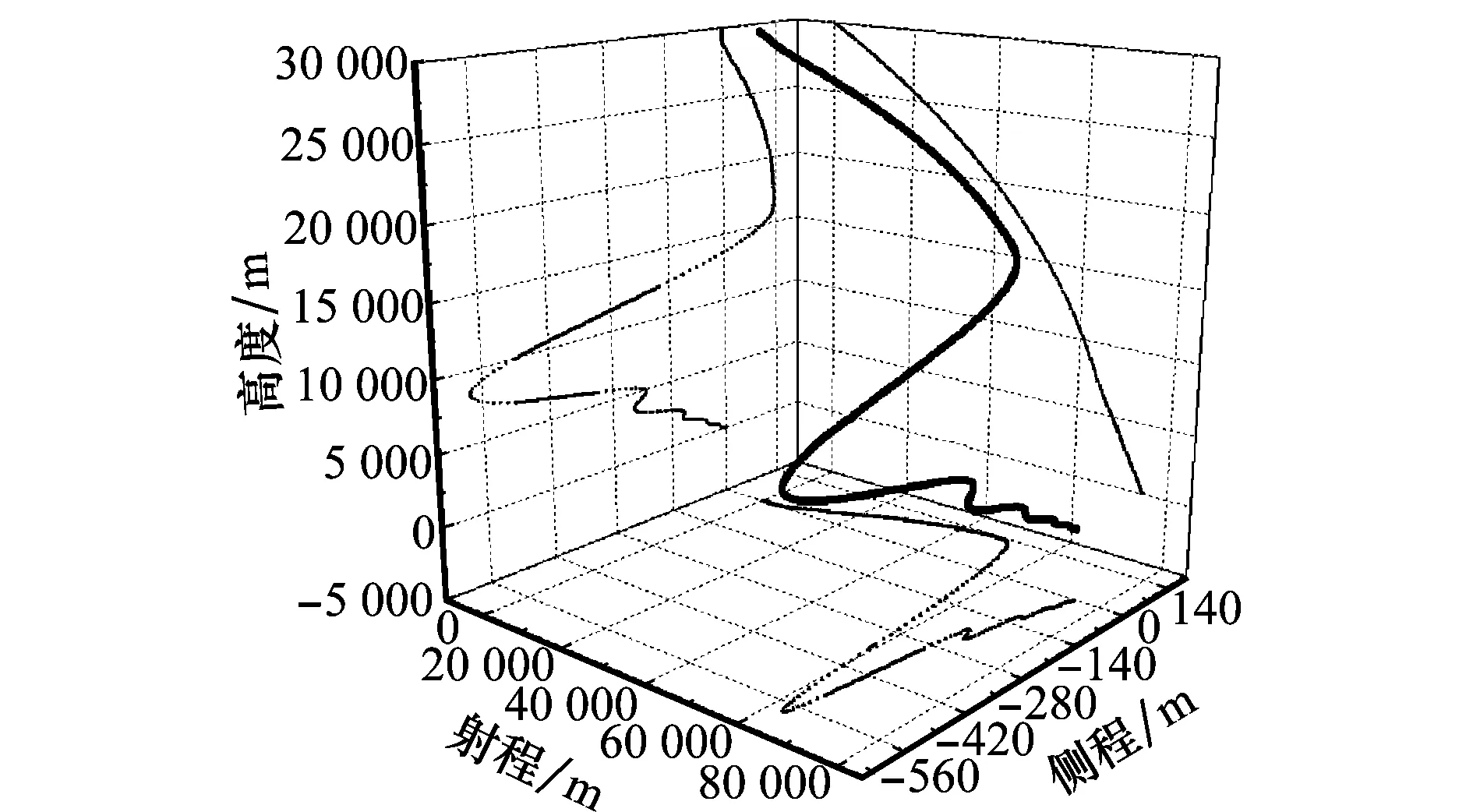
图25 三维弹道仿真曲线
最终弹着点(74 998.079 45 m, 0.306 22 m,-1.810 94 m),落点偏差2.060 51 m。
弹道初始阶段攻角曲线震荡的原因分析如下:在高空时,空气密度很小,同时弹体本身俯仰阻尼也相对较小,造成需要较长时间来消除震荡,当弹体到达低空时,攻角收敛到由当地速度、高度决定的平衡攻角附近。另外,攻角初始值为0,与当地速度和高度决定的平衡攻角相差较大,也是重要原因。
为检验控制器的鲁棒性,针对飞行器动态特性影响较大的气动参数进行拉偏,在拉偏条件下分析误差角跟踪误差项目如表2所示,具体误差曲线见图26~图29。
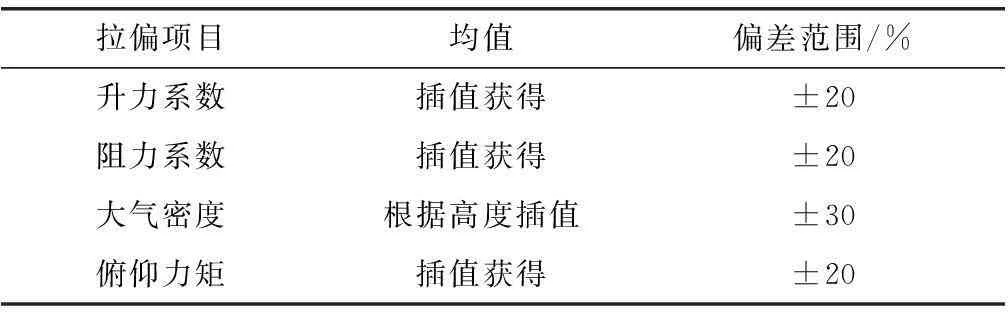
表2 气动拉偏项目
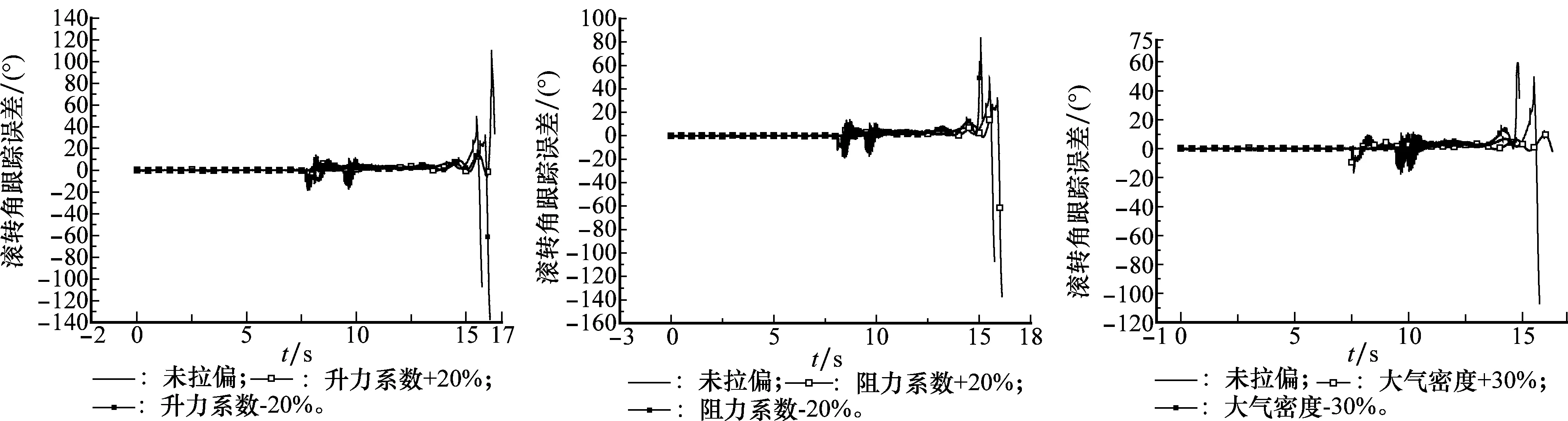
图26 升力系数拉偏的滚转角跟踪误差对比曲线 图27 阻力系数拉偏的滚转角跟踪误差对比曲线 图28 大气密度拉偏的滚转角跟踪误差对比曲线
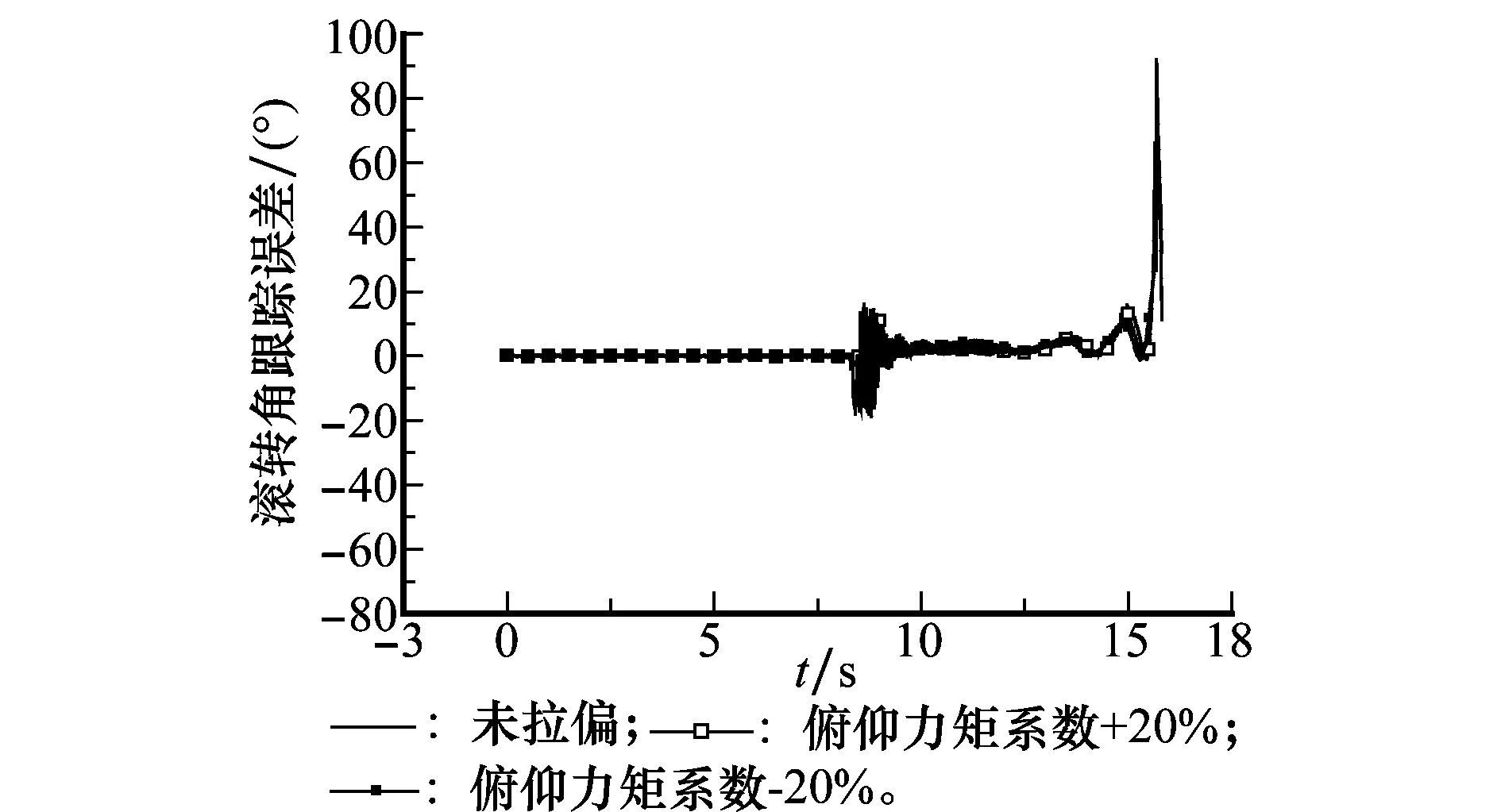
图29 俯仰力矩系数拉偏的滚转角跟踪误差对比曲线
从图26~图29中的拉偏仿真曲线可以看出,对主要气动参数和大气密度进行拉偏时,滚转角跟踪误差仍然保持在较小的范围内,所设计的滚转控制器可以较好的适应系统参数的变化,具有较好的鲁棒性。
4结论
(1) 采用“隔离法”的建模思路,给出了弹体质心移动和弹体滚动形成的交联运动下滑块和外部壳体之间相互作用力的准确形式,建立了非对称再入飞行器七自由度非线性动力学方程,方程的物理意义明确,利于仿真计算和动力学特性分析。
(2) 通过对模型动力学特性的分析,提出了滚转控制方案,在进行合理简化的基础上推导了滚转通道传递函数模型。采用标准系数法设计了滚转控制系统,所设计的控制器性能良好,设计过程简明,易于工程化。
(3) 通过开环仿真验证了动力学模型的准确性;在拉偏条件下进行了六自由度非线性数学仿真,验证了设计的滚转控制器的鲁棒性和有效性。
参考文献:
[1] Vaddi S S, Menon P K, Sweriduk G D. Multi-stepping approach to finite-interval missile integrated control[J].JournalofGuidance,ControlandDynamics, 2006, 29(4):1015-1019.
[2] Gao C S, Jing W X, Li R K. The research on maneuverable warheads with moving-mass[J].JournalofAstronautics, 2008, 29(6):1778-1781.(高长生,荆武兴,李瑞康.提高变质心飞行器可操纵性的方法研究[J].宇航学报,2008,29(6):1778-1781.)
[3] Murphy C H. Influence of moving internal parts on angular motion of spinning projectiles[J].JournalofGuidanceControlandDynamics, 1978,1(2):117-122.
[4] Murphy C H. Symmetric missile dynamic instabilities[J].JournalofGuidanceControlandDynamics, 1981, 4(5):464-471.
[5] Rogers J, Costello M. Flight dynamics and control authority of a projectile equipped with a controllable internal translating mass[C]∥Proc.oftheAIAAAtmosphericFlightMechanicsConferenceandExhibit, 2007, AIAA-2007-6492.
[6] Rogers J, Costello M. A variable stability projectile using an internal moving mass[C]∥Proc.oftheAIAAAtmosphericFlightMechanicsConferenceandExhibit, 2008, AIAA-2008-7116.
[7] Rogers J, Costello M. Control authority of a projectile equipped with a controllable internal translating mass[J].JournalofGuidanceControlandDynamics,2008, 31(5):1323-1333.
[8] Sukru A E, Atilla D. Trimming mass-actuated airplane in turns with zero side slip angle[C]∥Proc.ofthe51stAIAAAerospaceSciencesMeetingIncludingtheNewHorizonsForumandAerospaceExposition, 2013, AIAA 2013-0622.
[9] Chen L, Zhou G, Yan X J, Composite control strategy of stratospheric airships with moving masses[J].JournalofAircraft, 2012,49(3):794-801.
[10] Woolsey C A. Reduced hamiltonian dynamics for a rigid body coupled to a moving point mass[J].JournalofGuidanceControlandDynamics, 2005, 28(1):131-138.
[11] Menon P K, Sweriduk G D, Ohlmeyer E J, et al. Integrated guidance and control of moving-mass actuated kinetic warheads[J].JournalofGuidanceControlandDynamics, 2004, 27(1):118-126.
[12] Balarm J. Sherpa moving mass entry descent landing system[C]∥Proc.oftheInternationalDesignEngineeringTechnicalConferencesComputersandInformationEngineeringConference, 2005, DETC2005-85283.
[13] Rush D R, Beverly R S, Shawn A K. Moving mass trim control for aerospace vehicles[J].JournalofGuidanceControlandDynamics,1996,19(5):1064-1070.
[14] Li R K, Jing W X, Gao C S. Performance analysis of attitude and ballistic for moving-mass actuated vehicle[J].JournalofAstronautics,2009,30(4):1498-1503.(李瑞康,荆武兴,高长生.变质心飞行器姿态与弹道性能分析[J].宇航学报,2009,30(4):1498-1503.)
[15] Guo Z Y, Liang X G. Simplified approach for relaxed stabled stability missile autopilot design[J].JournalofSystemSimulation, 2012,29(8):97-100.(郭正玉,梁晓庚.静不稳定导弹控制系统设计研究[J].计算机仿真,2012,29(8):97-100.)
[16] Li A J, Sun J, Wang C Q, et al. Appling standard characteristic polynomial method to designing lateral directional mode control of flight control system[J].JournalofNorthwesternPolytechnicalUniversity,2011, 29(6):844-848.(李爱军,孙娇,王长青,等. 基于标准系数法的飞控系统横侧向模态控制方法研究[J].西北工业大学学报,2011, 29(6):844-848.)
[17] Hu J B, Chen X H. Standard coefficient design method for multi-loops control system and its application[J].SystemsEngineeringandElectronics, 2004,26(12):1852-1863.(胡剑波,陈新海. 多回路控制系统的标准系数法设计法及其应用研究[J].系统工程与电子技术,2004,26(12):1852-1863.)
[18] Li R K. Study of moving mass control and predictive guidance with applications to vehicle reentry maneuver[D]. Harbin:Harbin Institute of Technology,2010.(李瑞康.变质心控制与预测制导在飞行器再入机动中的应用研究[D].哈尔滨:哈尔滨工业大学,2010.)
[19] Li H J, Huang X L, Ge D M. Optimal trajectory design and tracking for maneuver reentry vehicles[J].SystemsEngineeringandElectronics, 2010,32(9):1951-1961.(李海军,黄显林,葛东明. 再入机动飞行器最优轨迹设计与跟踪[J].系统工程与电子技术, 2010, 32(9):1951-1961.)
[20] Li H J, Huang X L, Ge D M. Adaptive trajectory linearized control for maneuvering reentry vehicle[J].JournalofAstronautics, 2011,32(5):1039-1046.(李海军,黄显林,葛东明. 再入机动飞行器自适应轨迹线性化控制[J].宇航学报,2011,32(5):1039-1046.)
王林林(1987-),男,博士研究生,主要研究方向为飞行动力学与控制、飞行器系统设计。
E-mail:nemott@bit.edu.cn
E-mail:jianqiao@bit.edu.cn
王亚飞(1987-),男,博士研究生,主要研究方向为飞行动力学与控制、飞行器系统设计。
E-mail:wangyafei@bit.edu.cn
苏晓龙(1989-),男,硕士研究生,主要研究方向为飞行动力学与控制、飞行器系统设计。
E-mail:suxiaolong@bit.edu.cn

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141028.1630.009.html
Single moving-mass asymmetrical reentry vehicle modeling and control
WANG Lin-lin, Yu Jian-qiao, WANG Ya-fei, SU Xiao-long
(SchoolofAerospaceEngineering,BeijingInstituteofTechnology,Beijing100081,China)
Abstract:Based on “isolation method” modeling, through analyzing the moving mass and the vehicle separately,a dynamic system model of single moving-mass asymmetrical reentry vehicle is studied. According to the model, the dynamic characteristic of the asymmetrical reentry vehicle is analyzed and the roll control scheme is put forward. By reasonablly simplifying the nonlinear model,the transfer function is derived and the controller parameters are devised using the algebraic method. The veracity of the model and the feasibility of the control scheme are validated by mathematical simulation.
Keywords:moving mass roll control; reentry vehicle; isolation method modeling; algebraic method
通讯作者于剑桥(1972-),,男,教授,博士研究生导师,主要研究方向为多智能体系统分布式控制、鲁棒控制、飞行动力学与控制、飞行器系统设计。
作者简介:
中图分类号:TJ 765.2
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.22
基金项目:国家自然科学基金(61350010)资助课题
收稿日期:2014-01-16;修回日期:2014-07-21;网络优先出版日期:2014-10-28。
