基于杂波脊先验信息的非均匀杂波抑制方法
2015-02-18同亚龙代保全吴建新
同亚龙, 王 彤, 代保全, 吴建新
(西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071)
基于杂波脊先验信息的非均匀杂波抑制方法
同亚龙, 王彤, 代保全, 吴建新
(西安电子科技大学雷达信号处理国家重点实验室, 陕西 西安 710071)
摘要:机载雷达回波数据非均匀会在很大程度上削弱传统空时自适应处理算法的杂波抑制性能。为此,提出一种基于杂波脊先验信息的非均匀杂波抑制方法,利用机载雷达杂波信号在角度多普勒平面的谱分布信息构造导向矢量基,并在考虑阵元误差影响情况下,对待检测单元数据进行迭代的最小二乘拟合,最后对拟合后的剩余数据进行恒虚警检测处理。该方法充分利用了雷达系统参数及杂波谱分布等先验信息,并且不需要训练样本,可以较好地抑制非均匀杂波,从而改善机载雷达的检测性能。仿真实验验证了该方法的有效性。
关键词:机载雷达; 空时自适应处理; 非均匀杂波; 先验信息; 杂波脊
0引言
机载雷达安装在高空平台上,其相对于地基雷达具有探测距离远、覆盖范围广等优越性。但同时由于载机平台的运动及下视工作状态,机载预警雷达也面临着比地基雷达更为复杂的杂波环境。因此,要检测杂波背景中的运动目标,杂波抑制则是其必须要解决的难题。经过40多年的发展,空时自适应处理(space-time adaptive processing,STAP)技术[1-3]被证明是现有最好的杂波抑制方法,它能够同时从空间和时间上区分杂波和目标,可以在很大程度上改善机载预警雷达的杂波抑制及运动目标检测性能,特别对低速目标和被旁瓣杂波所遮蔽的弱小目标的检测更为有利。
由于杂波背景的统计特性未知,传统的STAP处理器通常假设回波数据服从独立同分布条件(independent and identically distributed,IID),通过选取待检测单元(cell under test,CUT)周围的距离样本估计出CUT内的杂波协方差矩阵,以形成自适应滤波权系数,对雷达系统所接收到的空时两维回波数据进行最优线性组合,从而最大化输出信杂噪比。然而,由于实际场景中存在多变的地形高程、地表类型、植被覆盖等情况,以及旁瓣目标、孤立干扰等的影响,机载预警雷达通常都工作在非均匀环境中[4],使得STAP处理器很难获得足够的IID样本,导致STAP技术的杂波抑制性能严重下降。
对此类由于数据非均匀性导致的STAP性能下降问题,常用的解决办法是在自适应滤波之前级联非均匀检测器(non-homogeneity detector,NHD),对数据样本是否满足IID条件做出判断,从而剔除有损自适应算法性能的非均匀样本数据[5-9]。这类方法能在一定程度上提高非均匀环境下的检测性能,但存在2个主要问题。首先,当环境非均匀性严重时,NHD需要剔除大量的奇异样本,使得可用于进行自适应权值训练的样本数更少甚至不足,在小样本情况下的STAP性能得不到有效提高;其次,此类算法关注的都是如何更好地去除训练样本中的非均匀性,而存在于CUT内的孤立非均匀杂波信号得不到有效抑制,导致大量虚警。为解决传统基于统计的STAP算法无法抑制CUT内的孤立干扰问题,人们提出了一种非统计的直接数据域(direct data domain,DDD)方法[10-11],通过最小化一维或两维对消以后的CUT数据功率的方式,在保护目标信号的同时对旁瓣孤立干扰源进行有效抑制。但这种方法只适用于空时均匀采样情况,对非矩形面阵系统或非均匀合成子阵系统等情况无效;由于未进行杂波统计特性的估计,无法对CUT内的均匀杂波分量进行有效抑制;基于对消的目标保护方式,一方面牺牲了空时孔径,性能损失通常大于3 dB[12],另一方面当存在阵元误差等非理想因素时,无法对目标信号进行有效保护,容易造成目标相消。
本文提出一种基于杂波脊先验信息的非均匀杂波抑制方法,该方法利用机载雷达所接收到的地杂波在角度多普勒平面上的谱分布特征(通常称作杂波脊),如正侧面阵系统的杂波分布为直线,非正侧面阵为椭圆形状[2],构造出一组杂波导向矢量基,在考虑阵元误差影响情况下,对CUT内的杂波分量在最小二乘约束下进行迭代拟合,然后对拟合后的剩余数据进行恒虚警检测,从而完成对非均匀杂波信号的充分抑制以及对运动目标的可靠检测。仿真实验结果验证了本文方法的有效性。
1信号模型
考虑正侧视机载雷达的运动目标检测问题。假设雷达天线为一N元等距线阵,一个相干处理间隔内的脉冲数为M。将第n个阵元第m次快拍的接收数据记为xnm,则第n个阵元的数据矢量x(n)可表示为
(1)
式中,(·)T表示转置操作。将x(n)(n=1,2,…,N)排列成NM×1的列矢量x,即
(2)
则雷达运动目标检测问题可转化为如式(3)的二元假设检验问题:
H0:x=xc+xn
(3)
式中,假设H0和H1分别表示CUT回波中不存在或者存在目标信号;xt,xc和xn分别表示目标、杂波以及噪声分量。下面分别给出其具体的信号模型。
目标回波信号xt可表示为
(4)
式中,α表示目标信号的复幅度;st表示目标信号的空时导向矢量,其表达式为
(5)
式中,⊗表示Kronecker积操作;st,s和st,t分别表示目标信号的空域导向矢量和时域导向矢量,其具体形式为
(6)
式中,ft,s=dcos(θt)cos(φt)/λ表示目标信号的归一化空间频率;θt和φt分别为目标相对于雷达的方位角和俯仰角;d和λ分别为雷达阵元间距及工作波长;ft,d=2vt/(λfr)表示目标信号的归一化多普勒频率;vt表示目标相对于雷达的径向速度;fr表示脉冲重复频率。
杂波回波信号xc[2]可表示为
(7)
式中,Nr表示距离模糊数;Nc表示距离环中独立散射体个数;αc,pq表示第p次模糊距离单元中第q个杂波块的回波复幅度;sc,pq为其相应的空时导向矢量,其定义如式(5)和式(6)。
噪声信号xn主要由接收机噪声和环境噪声组成,其中接收机噪声可建模为高斯白噪声,而环境噪声较为复杂,具有一定的空域相关性[2]。
当阵列天线不存在误差时,天线上的每个阵元具有一致的幅相特性,此时由式(4)~式(7)所给出的信号模型可以较好地表征机载雷达回波中的各种信号分量。但在实际阵列天线中,受机械加工等因素的影响,不可避免地存在着各种误差,这也就意味着式(6)所采用的理想阵列流型已不再合适,此时需要考虑误差对阵列天线的影响。本文主要考虑阵元误差这一典型情况[13-15],其误差模型可以表示为
(8)

此时,可构造阵元误差空时锥削矩阵T为
(9)

(10)
(11)
由式(10)可以看出,当存在阵元误差时,真实的目标导向矢量由2部分组成,第1部分对应理想的信号模型,第2部分为阵元误差对理想信号流型的调制。由此可见,受阵元误差的影响,DDD算法中基于理想信号模型的对消方式并不能完全滤除目标信号,无法对目标信号进行有效保护,从而引起目标自相消现象,使得雷达的运动目标检测性能严重下降。
2杂波秩分析
对于正侧阵雷达系统,假设存在一地面杂波块,相对于雷达的方位角和俯仰角分别为θc和φc,则其归一化空间频率和归一化多普勒频率分别为
(12)
(13)
式中,v为载机速度。则其空时频率之间具有如下关系
(14)
式(14)表明正侧阵雷达系统的地杂波回波信号的空时频率满足线性关系,即杂波脊在角度多普勒平面内为一条直线,式(14)中的β即为这条直线的斜率。
假设各杂波块之间相互独立,则雷达接收到的杂波信号所对应的空时协方差矩阵可以表示为
(15)
式中,σc,pq=E{|αc,pq|2}表示第p次模糊距离单元中第q个杂波块的回波能量;E{·}表示求期望操作。根据Brennan准则[2]可知,杂波协方差矩阵Rc的秩为
(16)
当考虑阵元误差影响时,杂波协方差矩阵可用式(9)给出的空时锥削矩阵T进行修正,即
(17)
Hadamard积有这样的重要性质[16]:当矩阵A和B为同维矩阵时,有rank(A⊙B)≤rank(A)rank(B)。因此,由式(16)可以得出
rank(Rc)
(18)
式(18)说明,阵元误差的存在不会增加杂波协方差矩阵的秩。
3基于杂波脊信息的杂波抑制方法
本文所提非均匀杂波抑制算法的动机与可行性是基于下面的事实:无论工作在什么样的非均匀环境中,机载雷达接收到的地面杂波在角度多普勒平面的谱分布轨迹(即杂波脊)都具有一定的特点,如正侧面阵机载雷达的杂波脊为直线,而斜侧面阵雷达的杂波脊为椭圆。而且,杂波脊的形状和位置只取决于天线阵面的几何构型、平台运动速度以及雷达系统参数,而与实际杂波的统计特性无关。一方面,对于实际的雷达系统来说,上述阵面构型或者系统参数等信息是已知的,利用这些先验信息可以计算出CUT中的杂波信号在角度多普勒平面内的分布,即估计出杂波脊的位置;另一方面,地杂波的非均匀性一般都反映在统计特性上的差异,当不同训练样本中杂波的统计特性相差较大时,常规STAP算法的杂波抑制性能就会由于协方差矩阵估计不准确而严重下降,但我们注意到,无论杂波是均匀或者非均匀,它在角度多普勒平面内的分布都是固定的。
当然,根据已知的参数信息估计出来的杂波脊是理想情况下的杂波分布,当存在阵元误差、互耦、杂波内部运动等非理想因素时,理论杂波脊会有一定程度的偏离或展宽。因此,在考虑典型非理想因素情况下,充分利用杂波脊先验信息,设计出针对非均匀杂波信号的抑制算法是个可行途径。
下面对本文所提算法进行详细阐述。在所假设的正侧阵系统中,当天线阵元以半波长等间距排布时,回波数据中地杂波信号将占据整个归一化的空间频率范围。因此,首先对完整的归一化频率区间[0,1]进行rc点的均匀离散化,即得到离散的空间频率点fc,s,r=(r-1)/rc(r=1,2,…,rc)。根据式(14)的线性关系即可确定相应的多普勒频点,这样就得到了rc组落在杂波脊曲线上的空时频点
(19)

(20)
(21)
式中,al∈Crc×1为第l个距离门数据在所给基下的拟合系数。此处的最小二乘拟合问题为凸优化问题,可直接采用优化软件工具CVX[17]求解。由于阵元误差Es通常未知,本文采用迭代最小二乘的方式对阵元误差和拟合系数进行联合估计,从而实现对CUT数据中的杂波分量的充分抑制,并得到杂波抑制后的剩余数据yl:
(22)

本文算法的详细操作步骤总结如下。
步骤 1根据系统参数确定杂波脊位置,然后对杂波脊上的空时频点进行离散化处理。
步骤 3参数初始化:阵元误差Es=1N,数据范数zl=‖xl‖2,噪声电平σl,迭代差值δl=σl。
步骤 4代入Es,求解式(21)的优化问题,得到拟合系数al。
步骤 5代入al,求解式(21)的优化问题,得到阵元误差Es。
步骤 7判断是否zl大于σl并且δl大于0.01σl:是,执行步骤4;否,执行步骤8。
步骤 8根据式(22)计算剩余数据yl。
步骤 9对各距离门数据对应的剩余数据进行CA-CFAR检测,输出目标检测结果。
4仿真实验
本节通过仿真数据实验对所提算法的有效性进行验证。为了能够客观、真实地反映出实际工作中机载预警雷达所接收到的回波数据的非均匀性,本文数据仿真中采用了欧空局和鲁汶大学于2010年联合发布的全球陆地覆盖数据GlobCover2009[18]以及美国航天局与国防部国家测绘局于2000年获得的全球数字高程数据SRTM[19]。仿真场景中心(即载机位置)的经纬度分别为-76.724 9°和38.999 2°,位于美国东海岸的Delmarva半岛,该地区有明显的陆海交界、城市及山区等地形地貌,雷达回波具有明显的非均匀性,可以更好地检查本文算法的有效性。另外,仿真中加入了10%的幅度误差和6°的相位误差。系统仿真参数如表1所示。
表1 仿真参数
图1给出了仿真数据的脉冲多普勒处理结果。图中深色区域为散射系数较低的水域回波,从图中可以看到数据中存在着明显的水陆交界,这与仿真场景地形地貌一致,也与美国空军研究实验室(AFRL)主导的MCARM项目所获得的实测数据的处理结果[20]非常相似,说明了本文根据地形数据仿真得到的机载雷达回波数据具有一定的可信度,能够真实反映雷达实际工作中遇到的非均匀环境。

图1 仿真数据的脉冲多普勒处理结果
另外,为了更好地反映本文算法相对于已有算法的性能优势,仿真数据中注入了5个强旁瓣孤立干扰点信号和4个运动目标信号,这些信号的空域阵列流型也存在着相同的阵元误差,具体参数如表2所示。这些强的旁瓣孤立干扰点信号可以假设来自于具有比背景杂波强得多的雷达后向散射系数的地面物体,如桥梁、铁塔和角反射器等,有助于增强仿真数据的非均匀性。

表2 注入信号参数


图2 拟合数据的脉冲多普勒处理结果 图3 迭代次数 图4 估计误差与真实误差比较
下面本文通过2组实验结果对所提算法的有效性进行说明。在机载雷达数据处理中,当回波中包含大量孤立干扰及陆海交界等信号分量,具有很强的非均匀性时,通常采取的做法就是在自适应处理前级联一种或多种NHD,如基于广义内积(generalized inner product,GIP)的NHD,从全部或部分距离样本中挑选出符合条件的均匀样本,进行自适应权值的训练,从而提高自适应算法在非均匀杂波环境中的处理性能。另外,由于实际机载雷达系统自由度通常都很大,全维自适应处理不可实现,因此数据处理中也都采取降维STAP的方法,扩展因子化方法(extended factored approach,EFA)[21]和联合域局域化(joint domain localized,JDL)方法[22]就是其中比较典型的常用方法。因此,为了进一步考察所提算法的有效性,本文也给出了基于GIP样本选择的EFA和JDL算法的处理结果,文中分别简记为GIP-EFA和GIP-JDL。除此之外,本文还给出了基于单距离样本的直接数据域算法的处理结果,该算法通过空时二维滑窗获取足够的训练样本进行自适应权值的训练,从而避免了临近距离门训练样本的非均匀问题,文中记作DDD。图5依次给出的是GIP-EFA、GIP-JDL、DDD和本文算法处理后CFAR检测的输出结果。从图5(a)和图5(b)中可以看出,传统方法GIP-EFA和GIP-JDL无法对所加入的孤立干扰信号进行有效抑制,在检测结果中出现大量虚警;这些强的孤立干扰的存在会抬高自适应处理后的CFAR检测门限,造成对弱目标信号的漏警,目标信号1和2就因此而无法被检测到;另外,目标信号3和4位于海陆交界处,由于无法获得足够的均匀样本数据而不能对目标信号的背景杂波进行有效估计和抑制,使得这2个目标仍然湮没在较强的剩余杂波中而无法得到检测。从图5(c)可以看出,DDD算法虽然规避了临近距离门样本非均匀问题,但空时子孔径平滑过程会造成自由度损失,影响了自适应算法的杂波抑制效果,导致虚警增加;而且在存在阵元幅相误差情况下,DDD算法的对消过程无法有效滤除样本数据中的目标分量,引起目标自相消问题,造成漏警。从图5(d)中本文算法的检测结果可以看到,孤立干扰信号都得到了有效抑制,目标信号也都可以被检测出来;相对于其他2种算法,本文算法检测到的虚警也更少。

图5 检测结果比较
图6给出了GIP-EFA、GIP-JDL、DDD和本文算法的检测概率曲线。实验中,选取第11~50号多普勒通道、第401~500号距离门范围内的数据做总共4 000次的蒙特卡罗实验,虚警概率设置为0.01。从图中可以看出,GIP-EFA和GIP-JDL的检测性能比较一致,而本文算法的检测性能远好于其他2种算法,如当检测概率为0.8时,本文所提算法有超过3dB的性能优势。而在阵元误差及自由度损失影响下,DDD算法在给定的信噪比范围内基本无法实现对目标信号的检测。
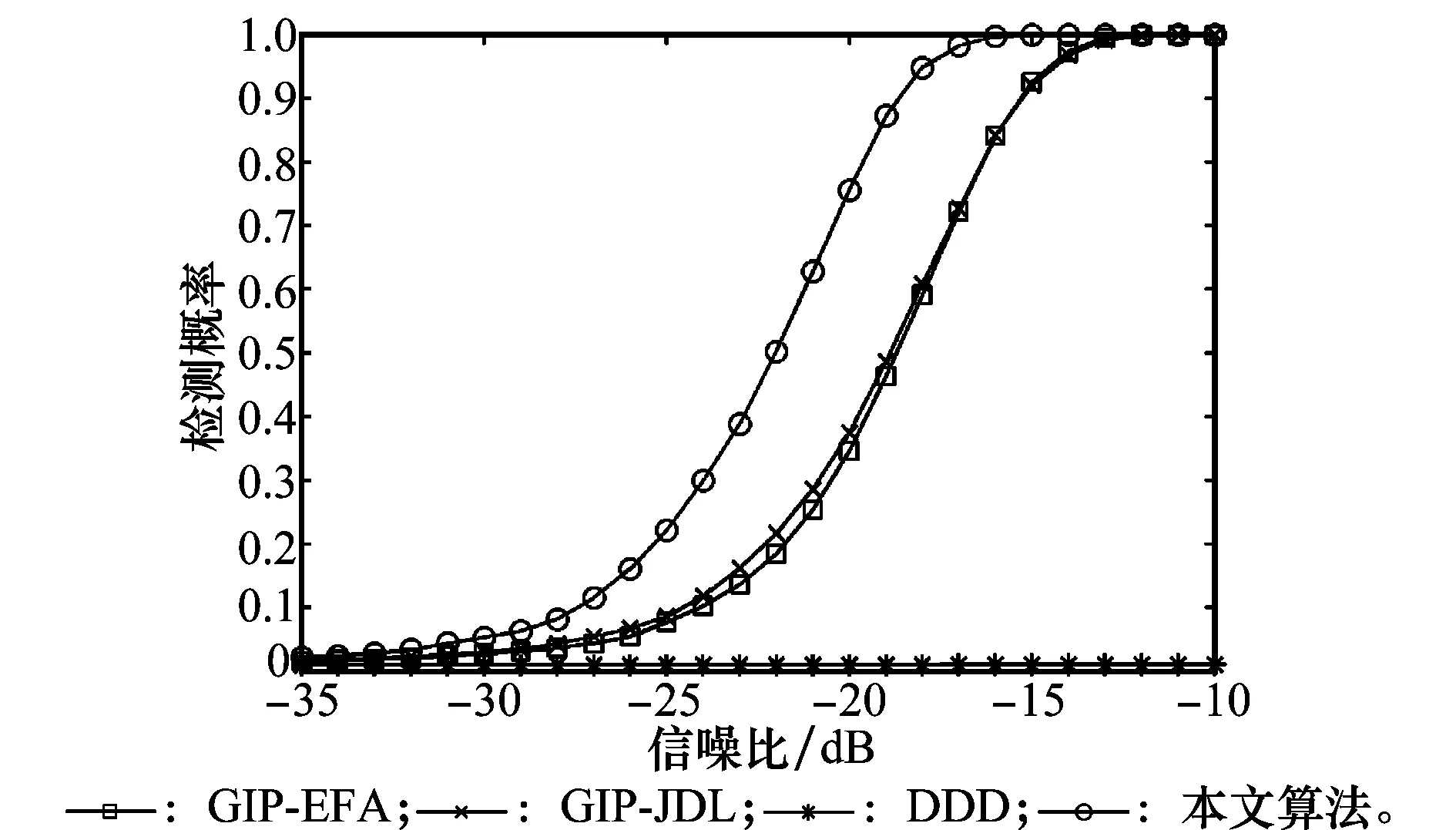
图6 检测概率曲线
5结论
针对机载预警雷达中的非均匀杂波抑制问题,本文提出一种基于杂波脊先验信息的杂波抑制方法。该方法在充分考虑阵元误差影响情况下,利用构造的导向矢量基对雷达回波数据进行迭代的最小二乘估计,可以实现对非均匀杂波的充分拟合及抑制。基于数字地形数据的雷达回波仿真实验验证了本文算法的有效性。需要说明的是本文仅考虑了存在阵元误差情况下的正侧阵天线系统中的杂波抑制情况,对于非正侧阵构型以及存在其他类型非理想因素的情况将在后续工作中进一步研究。
参考文献:
[1] Brennan L E, Reed I S. Theory of adaptive radar[J].IEEETrans.onAerospaceandElectronicSystems,1973,9(1):237-252.
[2] Ward J. Space-time adaptive processing for airborne radar TR-1015[R]. Lexington:MIT Lincoln Laboratory, 1994.
[3] Klemm R.Principlesofspace-timeadaptiveprocessing[M]. London:the Institution of Electrical Engineers, 2002.
[4] Melvin W L. Space-time adaptive radar performance in heterogeneous clutter[J].IEEETrans.onAerospaceandElectronicSystems, 2000, 36(2):621-633.
[5] Wu H, Wang Y L, Chen J W. Nonhomogeneous detector for STAP based on spectral center frequency method[J].SystemsEngineeringandElectronics, 2008, 30(4):606-608.(吴洪, 王永良, 陈建文. 基于频心法的STAP非均匀检测器[J].系统工程与电子技术, 2008, 30(4):606-608.)
[6] Chen Y X, Gao L N. Nonhomogeneous detector for STAP based on local template technique[J].JournalofNationalUniversityofDefenseTechnology,2013,35(3):132-137.(陈宇翔,高立宁.基于局域模板的STAP非均匀检测器[J].国防科技大学学报,2013,35(3):132-137.)
[7] Yang X P, Liu Y X, Long T. Robust non-homogeneity detection algorithm based on prolate spheroidal wave functions for space-time adaptive processing[J].IETRadar,SonarandNavigation,2013,7(1):47-54.
[8] Aghaabdellahian N, Modarres-Hashemi M. Improving performance of adaptive radar detectors in nonhomogeneous environment[C]∥Proc.ofthe21stIranianConferenceonElectricalEngineering, 2013:1-6.
[9] Chen S J, Kong L J, Yang J Y. Target detection for heterogeneous cyclostationary sea clutter[J].Circuits,Systems,andSignalProcessing, 2014, 33(3):959-971.
[10]AdveRS,HaleTB,WicksMC.Practicaljointdomainlocalisedadaptiveprocessinginhomogeneousandnonhomogeneousenvironments-part2:nonhomogeneousenvironments[J].IEE Proceedings of Radar, Sonar and Navigation, 2000, 147(2):66-74.
[11]AhmadiM,MohamedpourK,KeshvariF.Directdatadomain(D3)approach for space-time adaptive processing in colocated MIMO radar[C]∥Proc.of the 21st Iranian Conference on Electrical Engineering, 2013:1-4.
[12]YangZW,HeS,LiaoGS,etal.Directdatadomainapproachwithspace-timeadaptiveprocessingforarbitrarylineararray[J].Acta Electronica Sinica,2011,39(12):2900-2904.(杨志伟,贺顺,廖桂生,等.任意线阵的直接数据域空时自适应处理方法[J].电子学报,2011,39(12):2900-2904.)
[13]LiJF,ZhangXF,GaoX.Ajointschemeforangleandarraygain-phaseerrorestimationinbistaticMIMOradar[J].IEEE Geoscience and Remote Sensing Letters,2013,10(6):1478-1482.
[14]CaoSH,YeZF,HuN,etal.DOAestimationbasedonfourth-ordercumulantsinthepresenceofsensorgain-phaseerrors[J].Signal Processing, 2013, 93:2581-2585.
[15]JiangL,WangT.Arrayerrorestimationusingsubspace-basedapproach[J].Systems Engineering and Electronics,2014,36(4):656-660.(姜磊,王彤.基于子空间的阵元误差估计方法[J].系统工程与电子技术,2014,36(4):656-660.)
[16]HornRA,JohnsonCR. Topics in matrix analysis[M].England:CambridgeUniversityPress, 1991.
[17]GrantM,BoydS.CVX:matlabsoftwarefordisciplinedconvexprogramming[EB/OL].[2014-7-20].http:∥www.stanford.edu/~boyd/cvx.
[18] 中国科学院计算机网络信息中心全球变化参量数据库[EB/OL].[2014-7-20].http:∥globalchange.nsdc.cn.
[19] 中国科学院计算机网络信息中心国际科学数据服务平台[EB/OL].[2014-7-20].http:∥srtm.datamirror.csdb.cn.
[20]SloperD,FennerD,ArntzJ,etal.Multi-channelairborneradarmeasurement[R].NewYork:RomeLaboratory,1996.
[21]DipietroR.Extendedfactoredspace-timeprocessingforairborneradarsystem[C]∥Proc.of the 26th Asilomar Conference on Signals, Systems and Computing, 1992:425-430.
[22]WangH,CaiL.Onadaptivespatial-temporalprocessingforairbornesurveillanceradarsystems[J].IEEE Trans. on Aerospace and Electronic Systems, 1994, 30(3):660-669.
同亚龙(1987-),男,博士研究生,主要研究方向为阵列信号处理、空时自适应信号处理。
E-mail:yalong.t@163.com
王彤(1974-),男,教授,博士,主要研究方向为机载雷达运动目标检测、合成孔径雷达。
E-mail:twang@mail.xidian.edu.cn
代保全(1985-),男,博士研究生,主要研究方向为阵列信号处理、空时自适应信号处理。
E-mail:dbqhao@163.com
吴建新(1982-),男,副教授,博士,主要研究方向为阵列信号处理、空时自适应信号处理及动目标检测。
E-mail:jxwu@xidian.edu.cn

网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20141128.0838.001.html
Heterogeneous clutter suppression method based on the
knowledge of clutter ridge
TONG Ya-long, WANG Tong, DAI Bao-quan, WU Jian-xin
(NationalLabofRadarSignalProcessing,XidianUniversity,Xi’an710071,China)
Abstract:The heterogeneity of echo data in airborne radar can severely degrades the clutter suppression performance of conventional space-time adaptive processing (STAP)algorithms. To address this issue, a heterogeneous clutter suppression method based on the prior knowledge of clutter ridges is presented. A set of steering vector basis is first constructed by utilizing the spectral characteristics of the ground clutter seen by airborne radar, and then used to fit the test data in an iterative least mean-square manner with the presence of the array error under consideration. Subsequently, the constant false alarm rate detection is conducted on the residual data. This method makes full use of the prior knowledge of radar system parameters and clutter spectral structure and does not need any training samples, which can effectively suppress the heterogeneous clutter and significantly improve the detection performance of the airborne radar. Simulation results validate the effectiveness of the proposed method.
Keywords:airborne radar; space-time adaptive processing(STAP); heterogeneous clutter; prior knowledge; clutter ridge
作者简介:
中图分类号:TN 959.73
文献标志码:ADOI:10.3969/j.issn.1001-506X.2015.05.09
基金项目:国家自然科学基金(61372133,61471285);中央高校基本科研业务费专项资金(K50511020008)资助课题
收稿日期:2014-07-29;修回日期:2014-10-23;网络优先出版日期:2014-11-28。
