机载相控阵雷达仿真系统研究与实现
2019-07-08谢卫


摘 要: 通过对机载相控阵雷达原理、工作流程的研究,对其功能进行分解和融合,转化为目标检测、多目标滤波跟踪和任务资源调度管理等多个数学模型;着重分析研究了机载相控阵雷达的核心模块,其相关功能、原理和实现流程,以及仿真系统的体系结构,提出了机载雷达仿真软件系统的实现方法。对提出的方法进行仿真试验,充分验证了模型和方法的可行性和有效性。该仿真软件已成功应用到工程试验项目。
关键词: 机载雷达; 相控阵; 仿真建模; 数据融合; 目标跟踪
中图分类号:TN955 文献标志码:A 文章编号:1006-8228(2019)06-26-05
Abstract: By analyzing airborne phased array radar's function and its decomposition and synchronization, the mathematic models such as target indication by radar, multi-target tracking and resource management are built. Focus on the function, the theory and the realization process of the core model, a realization method of the simulation software system for airborne phased array radar is presented. The result of the simulation has validated the model and the method, the simulation software system has been successfully applied to the test project.
Key words: airborne radar; phased array; simulation modeling; data fusion; target tracking
0 引言
由于现代空战上各种复杂环境的影响,要求利用多种传感器组网来采集目标信息并加以融合,充分利用不同目标不同频段、各个方向的反射特性,最大限度地提取信息,满足空战需要[1,2]。对于数据融合来说真实的战场目标和传感器探测数据,是检验其有效性的最好条件。然而这样的真实数据很少,而且成本也较高,在融合算法的前期研究和实验阶段,就需要我们真实的模拟不同干扰环境下传感器的探测数据。
雷达分系统是飞机综合火控系统的重要传感器之一,也是研究空战中综合信息处理技术至关重要的数据来源之一。本文研究实现机载相控阵雷达的任务调度机制和跟踪滤波等关键技术,构建了能支持任意长仿真时间和包括机载运动平台及仿真过程中切换雷达工作模式在内的动态仿真环境,同时考虑欺骗干扰环境下雷达的跟踪处理和不同环境下雷达误差的在线模拟,为研究机载雷达抗干扰技术以及多傳感器数据融合处理技术提供一个灵活可控、高逼真度的数字仿真试验平台。
1 仿真系统模块与流程设计
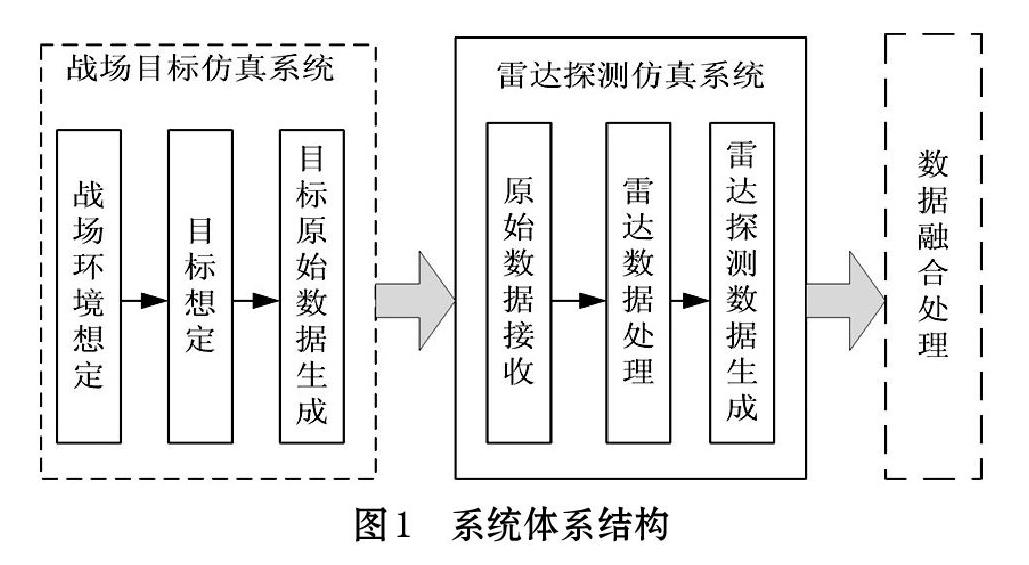
仿真系统按组成结构分为战场虚拟目标及状态仿真软件和雷达动态探测仿真软件两大部分。其中,战场目标仿真软件用于制作想定,对目标进行布站,以及提供目标速度、位置、航迹、型号以及目标所搭载的辐射源信息等。雷达探测仿真软件接收目标仿真软件产生的目标原始数据,并进行相关雷达数据处理,如计算信噪比、交汇计算等,模拟雷达对目标的探测处理,产生雷达探测目标的相关数据,成为后端融合处理系统的输入,软件结构及相互关系如图1所示[3]。
雷达探测功能仿真是通过仿真目标回波、接收机噪声、干扰、杂波等信号的幅度信息来复现雷达的检测过程,一般采用基于Monte Carlo的方法来实现[4]。主要是根据目标与雷达的交会几何关系计算信号及干扰的功率。因此,需要对目标与雷达交会的几何关系、目标与环境、雷达检测过程、雷达测量精度等建立数学模型。
2 核心模块的分析与建模
2.1 雷达检测模块
雷达检测模块主要功能就是获取目标的点迹和检测信息,主要完成坐标系转换、交会计算、检测计算等任务。设置雷达天线的方位、俯仰范围,天线增益、波束宽度、发射功率等参数等计算雷达的探测范围,通过与目标的交会判断,目标回波功率、噪声功率、信噪比、检测及虚警概率的计算完成雷达对目标的检测功能。
⑴ 坐标系转换
由于目标和雷达平台的位置参数都是在大地坐标系下给出的,为了得到目标相对于雷达平台的位置和速度信息,需要将目在标大地坐标系下的位置和速度转换到天线阵面直角坐标系。
⑵ 交会判断
搜索时,利用俯仰和方位波束信息来判断;当目标已被跟踪上时,可以预测到目标的距离和速度时,就可以利用距离波门、速度波门、俯仰及方位波束信息来判断。
假定目标在天线阵面方位坐标系下的位置(),雷达波束中心在天线方位坐标下的坐标(),方位和俯仰的波束宽度分别为,则交会成功的判断条件为
⑶ 检测计算
检测计算是在计算目标回波功率、干扰功率、噪声功率的基础上,设定合适的门限电平通过雷达检测方程得到检测概率和虚警概率。
2.2 数据处理模块
雷达数据处理模块主要是进行多目标的跟踪处理,具体包括航迹起始、航迹关联,航迹质量管理,以及航迹的滤波预测。
⑴ 航迹起始以及航迹管理
航迹起始方法:对于每一帧中,没有与任何航迹相关的点迹,均起始一条暂时航迹,其航迹质量为1(航迹质量共有0,1,2,3四等级,质量为0时航迹终止)。①以暂时航迹的第一点为中心P1,VmaxT(T为雷达的扫描周期)为相关门的半径,如果下一个扫描周期雷达在此区域观测到新的点迹P2,则形成暂时航迹的第二点,航迹质量升为2。②在获得P1,P2两点后,利用两点的数据,形成暂时航迹的状态估计,并对第三点进行预测,以预测点P3'为中心。新的点迹落入此关联门,航迹质量升为3,转化为可靠航迹。③如果没有点迹落入,则外推一个点再做预测,关联逻辑同上,若有观测值满足要求,则该航迹得到确认,转化为可靠航迹,否则删除该航迹[5]。
⑵ 航迹关联
这里采用计算量少的最近邻域相关法,即比较相关门内各个回波的更新向量v(k+1),使g(k+1)达到最小者被看作是真实目标的回波。其中
最近邻域相关法按以下四条判别准则进行关联。
① 若某个航迹门内只有一个观测量,则该航迹与此观测量相关,而不考虑其他。
② 若某个观测量已落入一个航迹门内,则该观测量与此航迹相关,而不考虑其他。
③ 当某航迹门内含有多个测量时,该航迹与最近的观测量相关。
④ 当某观测量落入多个航迹的门内时,该观测量与最近的航迹相关。
⑤ 在航迹关联时,当建立滤波器之后,采用椭球形相关门进行相关。
设γ为椭球跟踪门的门限大小,当回波Z(k+1)的范数满足关系式g(k+1)≤γ时,称Z(k+1)为候选回波。
⑶ 滤波预测
考虑到目标可能会机动飞行,因此采用当前比较有效的机动目标跟踪算法交互式多模型(IMM)算法,IMM算法包含了多个滤波器(各自对应着相应的模型)、一个模型概率估计器、一个交互式作用器(在滤波器的输入端)和一个估计混合器(在滤波器的输出端),多模型通过交互作用跟踪一个目标的机动运动[6,7]。
本系统中滤波器采用三个模型,第一个为非机动(匀速运动)模型,第二个和第三个都为机动(匀加速运动)模型,状态矢量和观测值均在地心直角坐标系下表示。子滤波器采用Kalman滤波器。
2.3 资源管理模块
资源管理模块主要实现各种雷达事件的产生,不同的工作模式对应不同的波形和波束参数,雷达事件的调度等功能。其工作流程如图2所示。
在保证高优先级雷达事件优先调度的条件下,使得调度间隔内的空闲时间尽可能少。采用自适应调度算法,其原理具体描述如下:
⑴ 调度器取出期望发射时间落入本调度间隔中的雷达事件,记为,将R中的雷达事件根据优先级和期望发射时间按字典序排列,得到。用Pi'表示此集合中第i个事件请求的优先级,t'ei表示此集合中第i个事件请求的期望执行时间,应满足以下约束:,当时,有。
⑵ 取出r1',令,送入执行链表。对的事件依次分析后分别送入执行链表、延迟链表和删除链表。
执行链表中的雷达事件要满足以下两个约束条件:① ,其中,ΔT'为中第i个事件请求的驻留长度,TEQ为执行链表中的事件驻留长度总和;②t'si的赋值满足下属公式的约束。
延迟链表中的雷达事件满足以下约束条件:①不满足执行链表的约束条件;②,为第i个事件请求的时间窗。
删除链表中的雷达事件不满足执行链表和延迟链表的约束条件。
执行链表中的雷达事件将被送入任务处理模块。延迟链表中的雷达事件送入下次调度间隔进行再次分析。删除链表中的雷达事件将被丢弃。
3 仿真试验分析
为了验证雷达仿真实现的效果和关键算法模块的性能,设计了一个仿真场景,如图3所示。
载机匀速直线运动,初始位置(20000m,6000m,0m),飞行速度200m/s;目标1匀速直线运动,与载机飞行方向夹角方位-15度,俯仰0度,初始位置(30000m,6000m,-30000m),飞行速度340m/s;目标2匀速直线运动,与载机飞行方向夹角方位15度,俯仰0度,初始位置(15000m,6000m,30000m),飞行速度500m/s;目标3抛物运动,与载机飞行方向夹角方位0度,俯仰30度,初始位置(40000m,5000m,20000m),飞行速度200m/s。
选择1号目标进行分析,在默認系统误差(由目标RCS、信噪比和距离相互作用产生)下,测试雷达处理效果。从图4可以看出,在滤波器作用下,目标1的跟踪误差小于检测误差,平滑滤波效果良好。检测误差变化范围在一百米左右,跟踪误差变化范围在几十米以内。
(a) 默认系统误差水平
(b) 人工干预误差
手动修改跟踪误差水平(测距误差100m,测速误差20m/s,俯仰测角误差0.005rad,方位测角误差0.005rad),模拟不同环境下雷达的跟踪效果。从图4可以看出,检测误差变化范围在一千米以内,跟踪误差变化范围在几百米以内,平滑滤波效果良好。
输入欺骗干扰,距离拖引干扰(拖引速度:1000m/s,拖引时间:5s),速度拖引干扰(拖引速度:100m/s,拖引时间:5s)。同时切换雷达的工作模式TAS/STT/MTT。
(a) 目标1检测跟踪误差
(b) 目标2检测跟踪误差
雷达在TAS模式下运行,在400s时对1号目标进行STT变换(拖引欺骗干扰效果从图5(a)可知),拖引期结束后仍按照TAS模式工作,雷达仍然能稳定跟踪1号目标;550s之后,由于对2号目标进行单目标跟踪(拖引欺骗干扰效果从图5(b)可知),所以1号目标在这段时间内没有检测和跟踪点迹;650s之后,由于角度原因,目标2未能交会和检测。此后雷达传感器转入MTT工作模式,对1号目标进行搜索。
TAS工作模式下,采样时间间隔为0.05s,MTT采样时间间隔为8s,对单个目标TAS的跟踪效果好于MTT模式。通过分析可知,建立的模型符合机载相控阵雷达的工作原理和性能要求。
4 结论
本文阐述了机载相控阵雷达动态探测目标的主要处理过程,对雷达数据处理的关键环节和相关模型给出了分析,并进行了仿真试验。在仿真系统中,对目标回波、接收机噪声、干扰、杂波等信号进行了模拟仿真,提出了机载相控阵雷达系统仿真的详细流程,同时提供了系统在线实时修改雷达性能参数和不同工作模式的切换,使得可以方便的模拟不同场景和质量的探测数据。仿真结果说明了系统通用模型的可行性和有效性,其软件系统已成功应用于某大型空战仿真系统,为空战系统的仿真研究提供了支撑平台和分析评估依据。目前,针对通用模型进行功能、流程仿真研究,对其不同型号的相控阵雷达模型有待作进一步差异性分析,研究其参数特征进行调优试验。
参考文献(References):
[1] 乔向东,李涛.多传感器航迹融合综述[J].系统工程与电子技术,2009.31(2):245-250
[2] HeYou, PengYingning, LuDajin. Survey of multisensor data fusion models[J]. Journal of Tsinghua University(Sci&Tech),1996.36(9):14-20
[3] 谢卫,彭鸣,陈怀新.基于MGIS的雷达探测模型仿真实现[J].信号与信息处理技术学术年会,2010:59-63
[4] 童维健,蔡桂友.相控阵雷达仿真技术研究[J].现代雷达,2008.30(4):45-49
[5] 何友,修建娟,张晶炜,关欣等.雷达数据处理及应用[M].电子工业出版社,2009.
[6] 丁鹭飞,耿富录.雷达原理(第三版)[M].西安电子科技大学出版社,2003.
[7] 曹正林,杨向忠,刘卫华.机载相控阵雷达TAS方式的实现[J].电子与信息学报,2009.31(5):1136-1139