四相鉴频器辅助的高动态BOC信号载波跟踪
2015-02-17闫振华,张天骐,张世会等
四相鉴频器辅助的高动态BOC信号载波跟踪
闫振华**,张天骐,张世会,欧旭东
(重庆邮电大学 信号与信息处理重庆市重点实验室,重庆 400065)
摘要:叉积鉴频器的输出频率范围比较窄,捕获信号以后的多普勒频偏可能不在其跟踪范围内。针对此问题,提出了使用四相鉴频器(FQFD)算法辅助已经成型的二阶锁频环加三阶锁相环模型。首先,利用四相鉴频器的非线性特性将接收信号频偏大步长牵引到较低范围,然后使用锁频环消除其大部分动态性,最后利用锁相环跟踪精度高的特点实现高动态二进制偏移载波(Binary Offset Carrier,BOC)信号载波的快速准确跟踪。在分析各跟踪模块算法的基础上,讨论了其本身的热噪声误差、动态适应力以及最优带宽等相关问题,理论分析和仿真结果验证了该方法比原有跟踪算法提高了300 Hz左右的鉴频范围,并且跟踪效果良好。
关键词:全球导航卫星系统;高动态BOC信号;载波跟踪;锁频环;四相鉴频器
1引言
高动态环境一般是指载体相对地球表面的速度在900 m/s以上、加速度在10 g以上的环境。这种复杂的环境使得接收到的二进制偏移载波(Binary Offset Carrier,BOC)信号多普勒频率和多普勒变化率比较大,即使在信号被捕获以后,残差频偏仍有几百赫,所以一般的锁相环无法正确跟踪,研制高动态接收机很有必要。同时,研究BOC扩频信号的跟踪技术也可以为“北斗”系统的接收机研制做技术储备[1]。
目前,国内外诸多学者提出了一系列针对高动态全球导航卫星系统(Global Navigation Satellite Systems,GNSS)信号跟踪的算法,研究大致分为四类:一是基于信号参数估计理论,例如使用Kalman 滤波器对多普勒频率及其变化率进行估计[2],通过自适应调节环路参数,但是运算量较大,难以实现实时跟踪;二是基于惯性导航系统(Inertial Navigation System,INS)辅助,即由INS产生载波多普勒频移估计值,提供给GPS模块中的跟踪环路,但是导航参数的误差随时间而积累,不适合长时间独立导航[3];三是新颖的跟踪算法,例如压缩感知算法通过随机观测矩阵去获取输入信号釆样点的组合,通过解决凸规划问题来复现信号,文献[4]提出了一种低计算复杂度的基于压缩感知的载波相位环路(CS-PLL)算法,但是新颖的理论在高动态方面技术还不够成熟;四是采用锁频环(Frequency Locked Loop,FLL)与锁相环(Phase Locked Loop,PLL)融合跟踪策略,FLL用来消除大部分的动态,PLL决定最终的跟踪精度,这种方法技术成熟,结构简单,易于实现[5-8],但是FLL的鉴频范围有限,难以实现对捕获的信号进行直接跟踪。文献[9]使用四相鉴频器(Four-Quadrant Frequency Dicriminator,FQFD)辅助跟踪,但是其FLL和PLL环路阶数太低,不适合高动态信号跟踪。同时,环路切换必然会导致环路滤波不连续,切换过于频繁不可避免产生较大误差,甚至可能导致环路失锁。
综合考虑以上各方面因素,本文针对高动态环境下叉积鉴频器鉴频范围窄的问题,研究了使用四相鉴频器算法辅助二阶FLL+三阶PLL算法的跟踪策略,每一时刻FLL和PLL同时工作,避免环路频繁切换,跟踪精度略差于PLL[10],但是可以满足正常跟踪要求。重点分析了各部分算法原理,同时对FLL和PLL本身的稳态误差进行了一定分析,最后用Matlab验证了算法的有效性。
2算法基本原理
设采样频率为fs=1/Ts,Ts为采样间隔,则接收BOC信号表示如下:

(1)
设接收通道振荡器振荡出的同相信号和正交信号分别为

(2)

(3)

经解扩、累加以后,其输出同相、正交信号可以表示为

(4)

(5)
2.1四相鉴频器
为实现精确跟踪并扩大频率跟踪范围,在BOC信号同步中利用四相鉴频器辅助原有的FLL+PLL跟踪模型,即完成伪码和多普勒频率捕获后,使用四相鉴频器,利用其非线性鉴频特性牵引捕获的多普勒频率,快速将频差从500Hz以大步长牵引降到10Hz左右进入叉积鉴频器的线性范围内。下面对四相鉴频器的工作机理进行分析[11]。



(6)

(7)
式中,


(8)


(9)

2.2叉积鉴频器
叉积鉴频器的输出频率范围比较窄,但是通过采用较宽的环路带宽,它可以容忍高动态环境的动态应力。使用四相鉴频器将频差降到某一特定范围内后,叉积鉴频器呈现线性关系,便可以实现载波频率准确跟踪。下面介绍其原理。
首先引入两个变量点积Pdot和叉积Pcross,它们的表达式分别为


(10)


(11)

(12)
故可取频率校正量为

(13)
2.3环路滤波器
高阶环路跟踪高动态信号系统误差较小,但是存在稳定性问题,一、二阶环路无条件稳定,却无法正确跟踪高动态信号,而不恰当的三阶环路参数设计会给系统工作带来隐患,特别是在载体动态比较低的情况下。所以高动态环境下用高阶环路,低动态环境下用低阶环路,有助于提高系统的稳定性。本文为了跟踪频率变化率的动态,锁相环路采用三阶滤波器,锁频环路采用二阶滤波器,其传递函数分别为[12]

(14)

(15)
在原来二阶滤波器的基础上加了一个积分器,因为对频差的积分才是相位误差,从而控制数控振荡器。图1为本文二阶FLL辅助三阶PLL的环路滤波器。

图1二阶FLL辅助三阶PLL环路滤波器
Fig.1 The loop filter of second-order FLL assisted third-order PLL
2.4算法误差分析
锁频环、锁相环对信号进行跟踪必然存在跟踪误差,即热噪声误差和动态应力误差,下面以本文的二阶锁频环和三阶锁相环为例进行分析[1,6]。
热噪声均方误差σtFLL和σtPLL的估算公式分别为

(16)

(17)
式中,C/N0为载噪比;B为环路带宽;F为载噪比较高取值1,否则取值2;T为相关累加时间。图2为不同载噪比条件下热噪声跟踪误差。
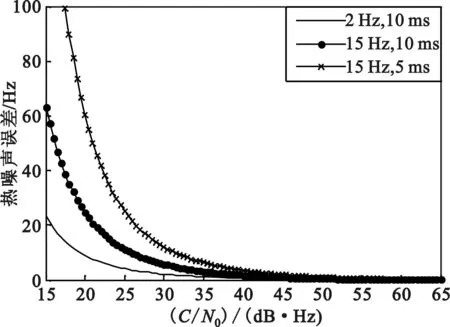
(a)FLL热噪声误差(F=2)
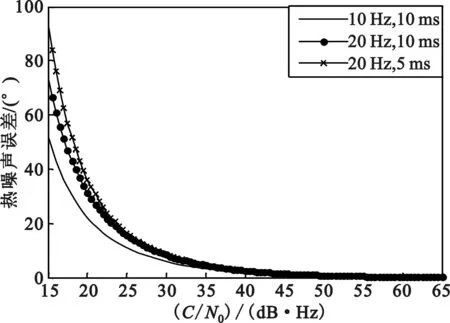
(b)PLL热噪声误差
可以发现,FLL和PLL的热噪声误差在同一载噪比条件下,相同的相关累加时间,环路带宽越宽误差越大;相同的环路带宽,相关累加时间越长,噪声越小。但是,环路带宽不可能无限小,下面的分析会发现其影响动态性能,而相关累加时间受接收数据跳变的影响,不可以无限长,所以均需要合理的取舍。
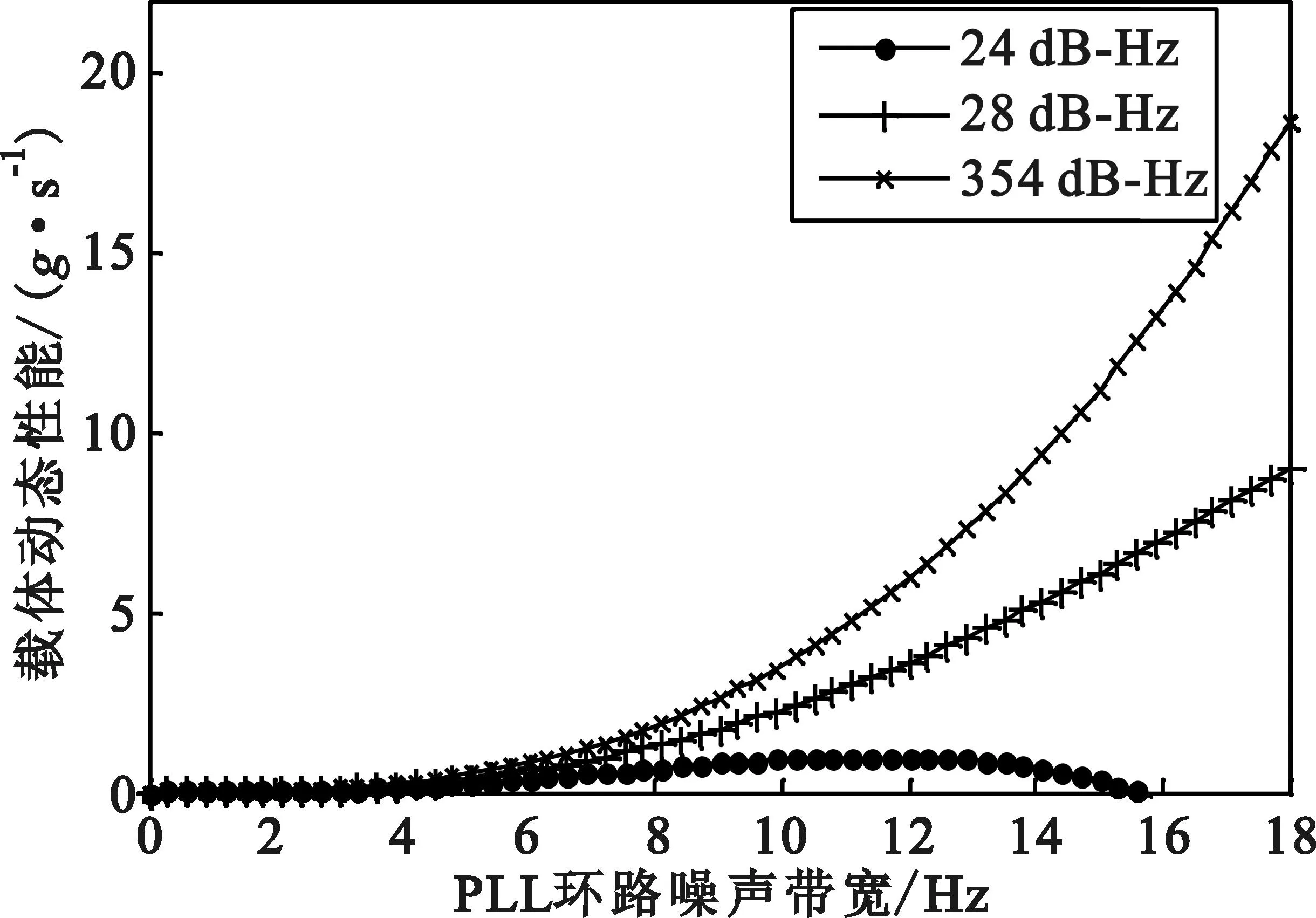
图3为FLL和PLL的可承受动态应力。对比发现,在相同的噪声带宽下,FLL承受动态应力的能力比PLL高一个数量级,所以在高动态这种复杂的环境下必须使用FLL辅助才能正确跟踪BOC信号。
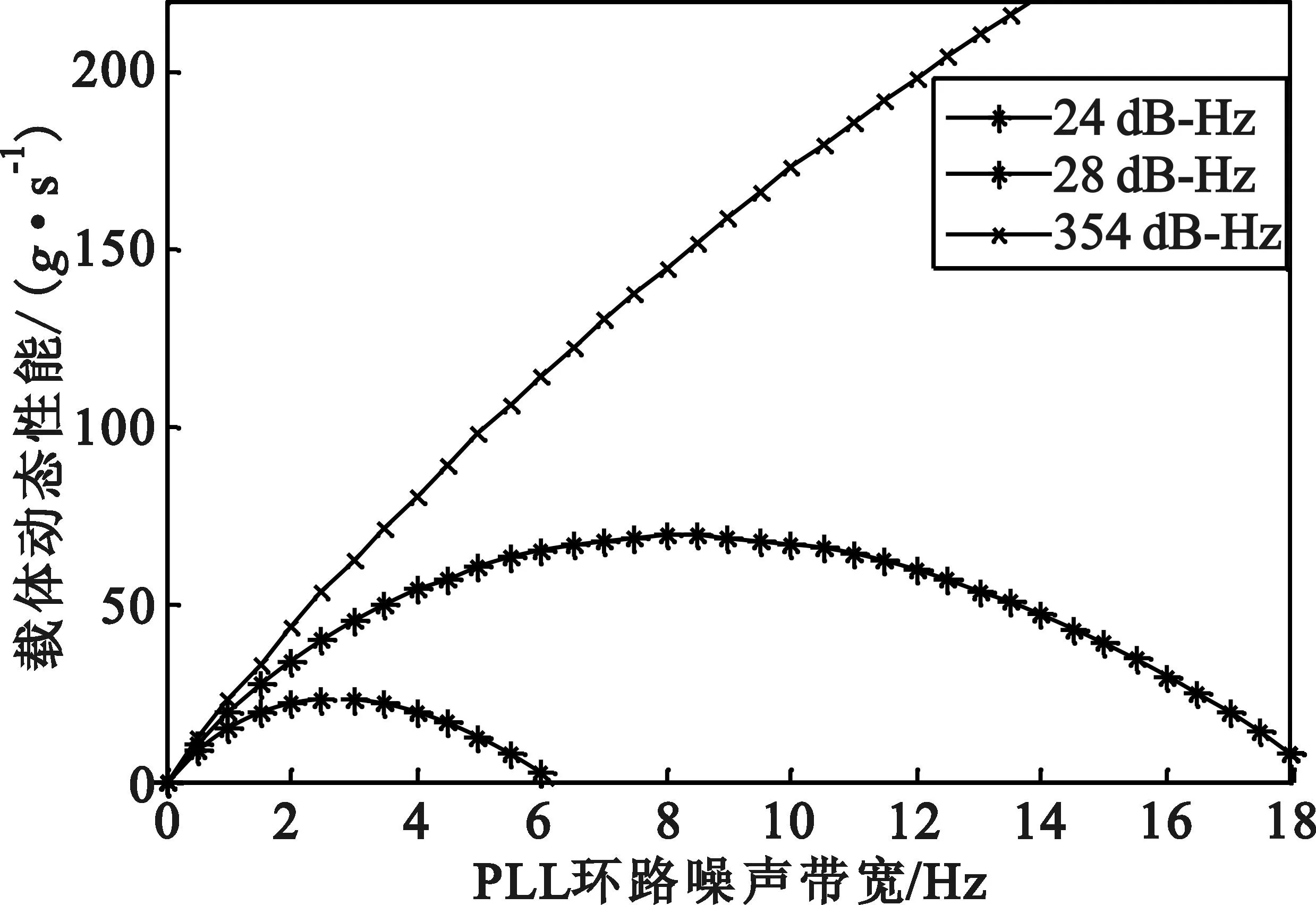
(a)FLL动态应力(F=2)
FLL和PLL总的跟踪误差与环路带宽的关系如图4所示。

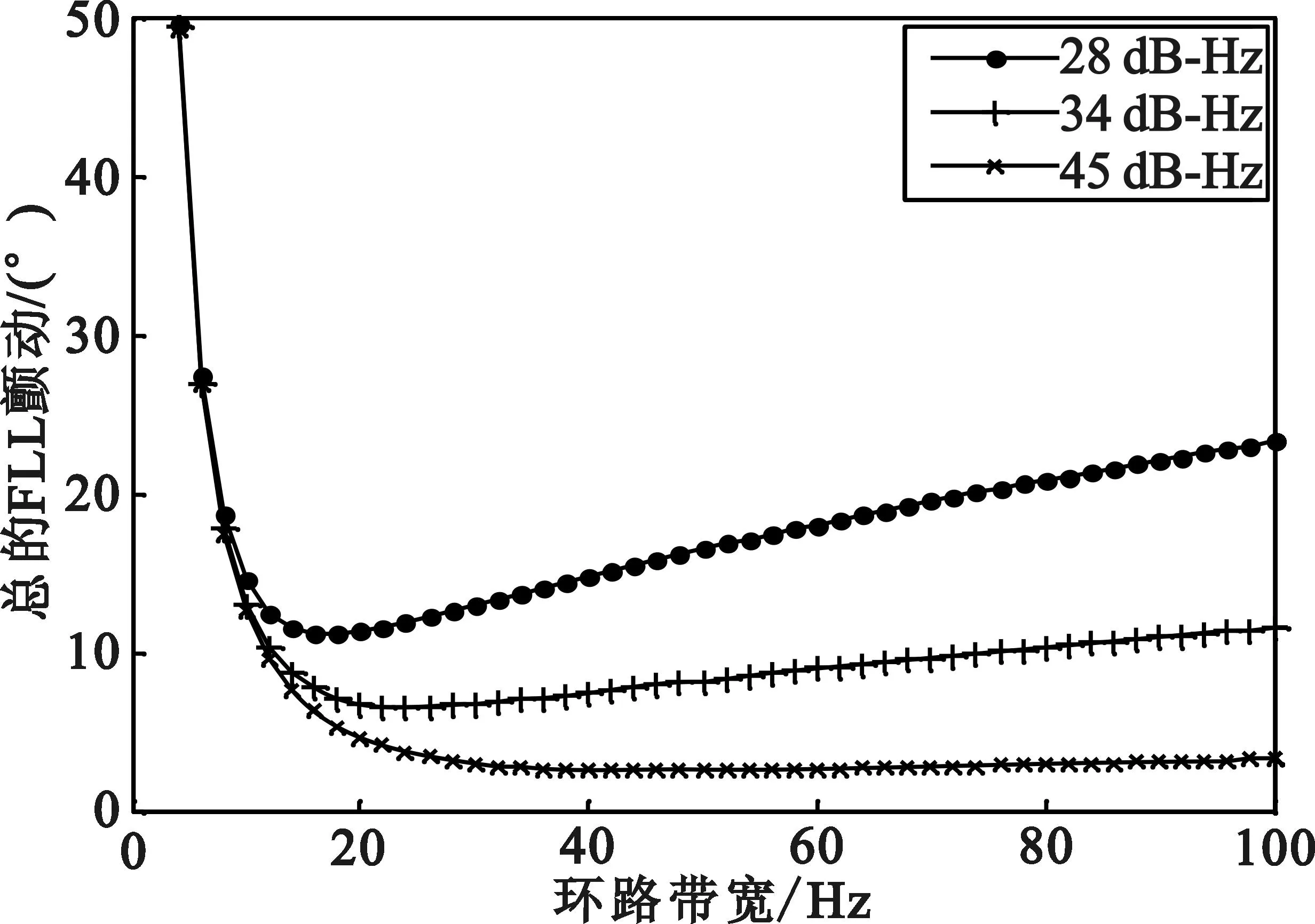
(a)FLL总跟踪误差
对热噪声误差和承受动态应力图的分析发现:热噪声误差与环路带宽成正比,一定的载噪比条件下承受动态应力与环路带宽成反比。因此,存在最优环路带宽使跟踪误差最小,图4也说明了这个事实。FLL和PLL理论最优带宽分别为

(18)

(19)
式中,β为比例系数,n为锁频环和锁相环阶数。
3高动态BOC信号载波跟踪模型
在完成BOC信号的快速捕获后,捕获算法给出的多普勒频率和码相位分辨率分别为500 Hz和1/2码片,然后转入载波跟踪过程。刚进入跟踪环路过程的500 Hz频差不在FLL的鉴频范围内,这需要更大范围的频率牵引,故本文采用四相鉴频器进行牵引。图5给出了本文算法的结构框图。
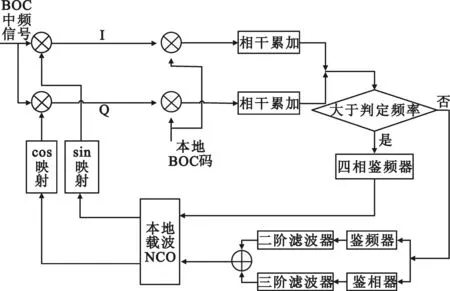
图5 高动态BOC信号载波跟踪框图
算法实现的具体流程描述如下:
(1)初始化基本参数;
(2)生成接收的BOC信号;
(3)生成I路和Q路正交的本地载波信号;
(4)用本地正交载波信号对接收BOC信号进行解调;
(5)生成本地BOC码对解调后的I、Q路接收信号进行解扩,同时累加1 ms;
(6)将I、Q路累加值计算后进行频率判别,大于判别条件则使用四相鉴频器进行牵引,直到频差牵引到较低范围;
(7)将I、Q路累加值计算后送入鉴频器、鉴相器,得到输出信号;
(8)分别经过环路滤波器,得到误差信号;
(9)使用误差信号控制本地载波NCO;
(10)判断有无信号,如果有信号,控制本地载波产生,重复上述过程,如果无信号则结束。
4仿真结果及分析
为了验证本文算法跟踪高动态信号的性能,使用Matlab对其进行仿真。以BOC(1,1)信号为例,同时使用直接的二阶锁频环辅助三阶锁相环跟踪模型进行对比。
4.1固定多普勒频率
基本参数设置:中频信号的中心频率为4.092 MHz,多普勒频率为2.490 kHz,采样频率为16.368 MHz,预检积分时间1 ms,捕获的信号频率为4.092 MHz+4×500 Hz,即捕获以后频差仍旧有490 Hz;直接使用二阶锁频环辅助三阶锁相环多普勒频差也设置为490 Hz。仿真结果如图6和图7所示。

(a)固定频偏FQFD跟踪过程
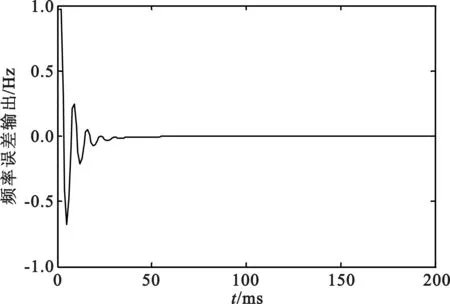
(b)FLL+PLL频率误差
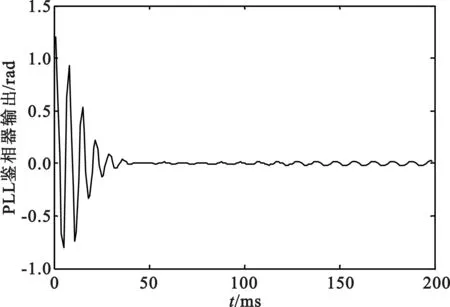
(c)PLL相位差输出
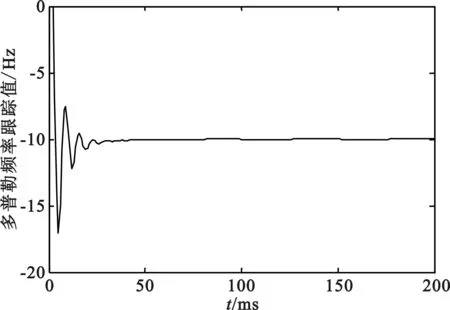
图7 直接使用FLL+PLL跟踪过程
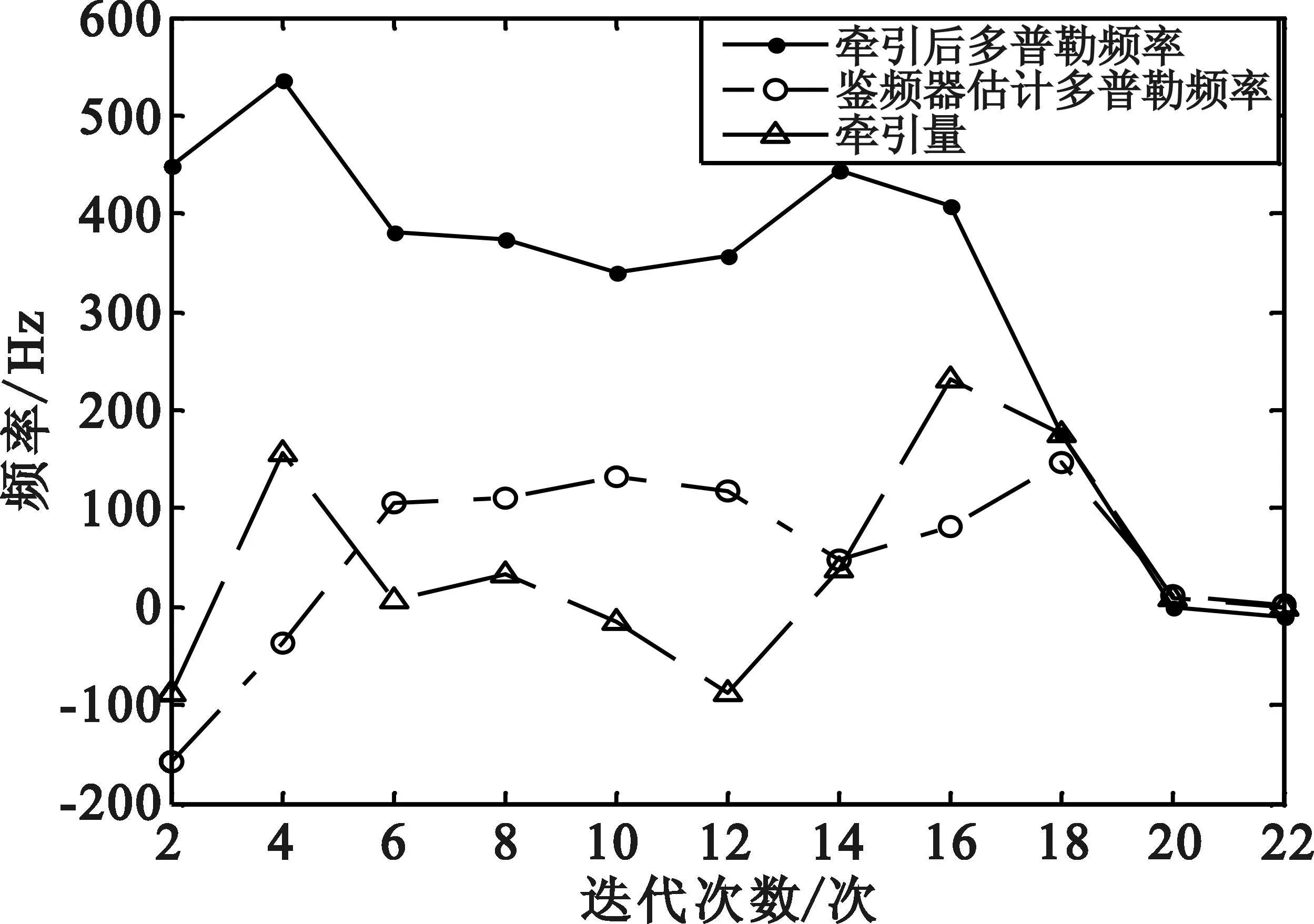
从图6可以看出,捕获信号以后频差太大,四相鉴频器首先工作,很快将频差降低到10 Hz左右,然后启动二阶锁频环辅助三阶锁相环进行跟踪, 经过30 ms左右频率和相位均可以达到准确跟踪。图7中直接使用二阶锁频环辅助三阶锁相环进行跟踪,当频差设置490 Hz的时候,出现跟踪错误,跳变到-10 Hz跟踪,实际上设置频差200 Hz时已经出现跟踪跳变,但是频差150 Hz其实也可以实现正确跟踪。很明显,四相鉴频器扩大了鉴频范围,实现了正确跟踪。
4.2一次斜升多普勒频率
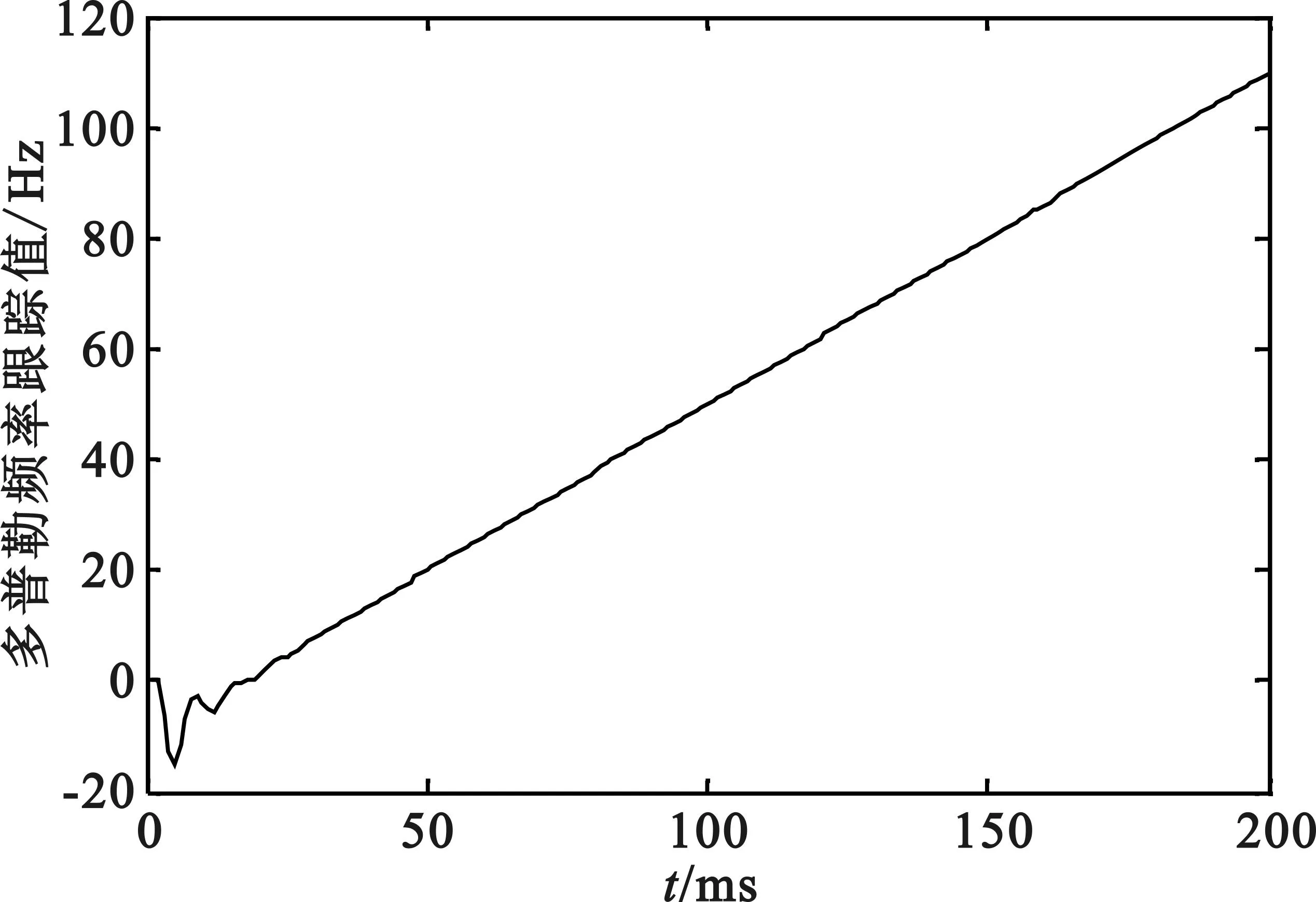
基本参数设置:中频信号的中心频率为4.092 MHz,多普勒频率为2.490 kHz,采样频率为16.368 MHz,预检积分时间1 ms,捕获的信号频率为4.092 MHz+4×500 Hz,多普勒频率加速度取10g,(1g引起的多普勒频率变化率为51.5 Hz/s);二阶锁频环辅助三阶锁相环固定多普勒频差也设为490 Hz。仿真结果如图8和图9所示。
(a)一次频偏FQFD跟踪过程
(b)FLL+PLL频率跟踪过程
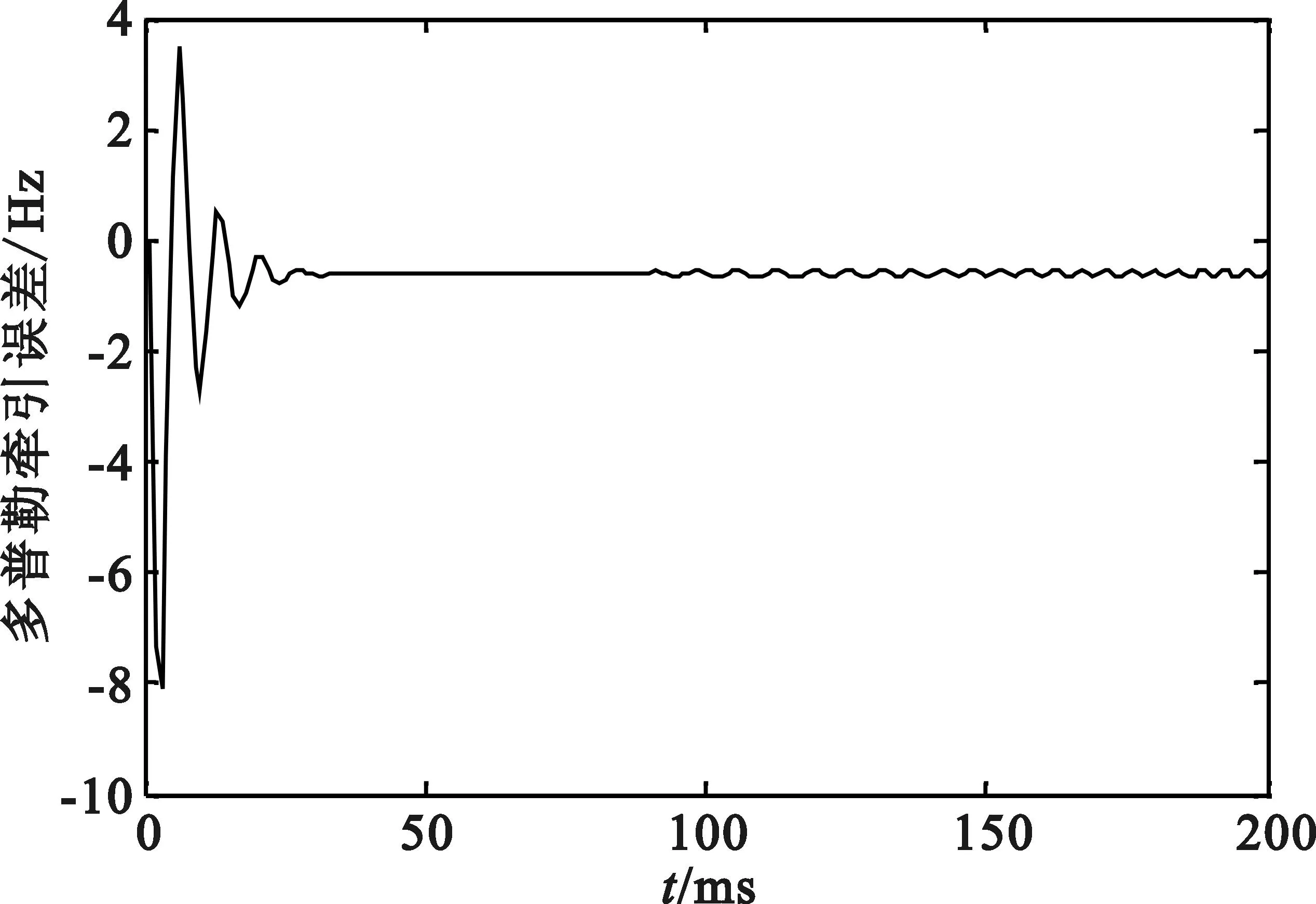
(c)多普勒频差输出
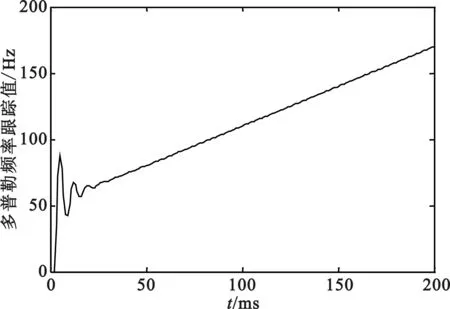
图9 一次频偏直接使用FLL+PLL跟踪过程
从图8可以看出,带多普勒频率加速度以后,四相鉴频器振动相比固定频偏更加激烈,所需叠加次数也相应增加,当频差降低到一定程度启动二阶锁频环辅助三阶锁相环,利用其动态适应力强也可以实现准确跟踪。图9直接利用二阶锁频环辅助三阶锁相环,设置固定频差490 Hz,其他加速度条件不变,可以看到跟踪又出现错误,虽然其完全可以承受所设动态应力,但是频差已经超出跟踪范围。显然,FQFD辅助环路有效增加了其鉴频范围。
5结束语
针对高动态BOC信号在捕获以后频差还有500 Hz左右难以跟踪的问题,本文使用四相鉴频器以大步长对其进行牵引,同时利用原有FLL+PLL跟踪模型的优良性能实现信号准确跟踪。首先,分析了FLL和PLL的热噪声误差、动态应力等相关问题,从理论上说明了误差的影响因素,提供了接收机参数设置依据,对FLL和PLL动态性的分析表明了使用FLL 辅助的必要性。同时,实验以BOC(1,1)为例验证,发现原有的FLL+PLL模型鉴频范围大约150 Hz,再提高频偏,则会出现跟踪频率跳变,本文方案成功将频偏提升到500 Hz,可以准确跟踪,并且跟踪时间没有变得更长。
参考文献:
[1]谢钢. GPS原理与接收机设计[M]. 北京:电子工业出版社,2009.
XIE Gang. Principles of GPS and Receiver design [M].Beijing:Publishing House of Electronics Industry,2009.(in Chinese)
[2]Lian P. Improving tracking performance of PLL in high dynamic applications[D].Calgary:University of Calgary,2004.
[3]刘苑伊,赵昀,耿生群,等. 基于 INS 辅助的高动态 GPS 接收机算法研究[J]. 计算机工程与设计,2011,32(3): 1096-1098.
LIU Yuanyi,ZHAO Yun,GENG Shengqun,et al. Research on INS aided high dynamic GPS receiver algorithm[J]. Computer Engineering &Design,2011,32(3): 1096-1098.(in Chinese)
[4]Schnelle S R,Slavinsky J P,Boufounos P T,et al. A compressive phase-locked loop[C]//Proceedings of 2012 IEEE International Conference on Acoustics,Speech and Signal Processing(ICASSP). Kyoto:IEEE,2012:2885-2888.
[5]邓晓东,孙武. 基于 FLL+ PLL 的载波跟踪环路设计[J]. 现代防御技术,2010(4): 137-141.
DENG Xiaodong,SUN Wu. Design of Carrier Ttracking Loop Based on FLL+PLL[J]. Modern Defence Technology,2010(4): 137-141.(in Chinese)
[6]Ward P W. Performance comparisons between FLL,PLL and a novel FLL-assisted-PLL carrier tracking loop under RF interference conditions[C]//Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GPS 1998).Tennessee,USA:IEEE,1998:783-795.
[7]许志鹏,崔琛,余剑. 基于锁频环与锁相环相结合的载波跟踪技术[J]. 电讯技术,2012,52(4):558-561.
XU Zhipeng,CUI Chen,YU Jian. Carrier Tracking Based on Combination of FLL and PLL[J]. Telecommunication Engineering,2012,52(4):558-561.(in Chinese)
[8]乐四海,楚恒林,宁尚国,等. 基于DSP的高动态接收机载波捕获跟踪技术[J]. 电讯技术,2007,47(3):136-140.
YUE Sihai,CHU Henglin,NING Shangguo,et al. Carrier Acquisition and Tracking Technique for High Dynamic Digital Receivers Based on DSP[J]. Telecommunication Engineering,2007,47(3):136-140.(in Chinese)
[9]李陟,吕卫华. 一种应用四相鉴频的扩频接收机载波快速同步技术研究[J]. 科学技术与工程,2008,8(18): 5178-5182.
LI Zhi,LYU Weihua. Study on the carrier fast synchronization technology of spread spectrum receiver based on FQFD[J]. Science Technology and Engineering,2008,8(18): 5178-5182.(in Chinese)
[10]Roncagliolo P A,De Blasis C E,Muravchik C H. GPS digital tracking loops design for high dynamic launching vehicles[C]// Proceedings of 2006 IEEE Ninth International Symposium on Spread Spectrum Techniques and Applications. Manaus-Amazon:IEEE,2006:41-45.
[11]孙礼,王银锋. GPS 信号捕获与跟踪策略确定及实现[J]. 北京航空航天大学学报,1999,25(2):134-137.
SUN Li,WANG Yinfeng. Determination and Realization of Acquisition and Tracking Strategy of GPS Signal[J]. Journal of Beijing University of Aeronautics and Astronautics,1999,25(2): 134-137.(in Chinese)
[12]马路,石立国,王竹刚. FLL 辅助 PLL 载波跟踪环路误差分析[J]. 测控技术,2014,33(9): 131-135.
MA Lu,SHI Liguo,WANG Zhugang. Analysis on FLL -Assisted-PLL Carrier Tracking Loop Error[J]. Measurement & Control Technology,2014,33(9): 131-135.(in Chinese)

闫振华(1988—),男,内蒙古丰镇人,硕士研究生,主要研究方向为导航信号的捕获与跟踪;
YAN Zhenhua was born in Fengzhen,Neimenggu Autonomous Region,in 1988. He is now a graduate student. His research concerns acquisition and tracking of navigation signal.
Email:yanzh0@163.com
张天骐(1971—),男,四川眉山人,博士,教授,主要研究方向为语音信号处理和通信信号的调制解调、盲处理、神经网络实现以及FPGA、VLSI实现;
ZHANG Tianqi was born in Meishan,Sichuan Province,in 1971. He is now a professor with the Ph.D. degree. His research concerns speech signal processing,modulation/demodulation,blind processing,neural network implementation and the FPGA and VLSI implementation of communication signal.
Email:zhangtq@cqupt.edu.cn
张世会(1991—),男,山东聊城人,硕士研究生,主要研究方向为信道编码盲识别;
ZHANG Shihui was born in Liaocheng,Shandong Province,in 1991. He is now a graduate student. His research concerns blind identification of channel codes.
Email:823915755@qq.com
欧旭东(1990—),男,湖南岳阳人,硕士研究生,主要研究方向为卷积盲源分离。
OU Xudong was born in Yueyang,Hunan Province,in 1990. He is now a graduate student. His research concerns convolutive blind source separation.
Email:627624073@qq.com
引用格式:闫振华,张天骐,张世会,等.四相鉴频器辅助的高动态BOC信号载波跟踪[J].电讯技术,2015,55(6):658-664.[YAN Zhenhua,ZHANG Tianqi,ZHANG Shihui,et al.Carrier Tracking of High Dynamic BOC Signal Based on Four-Quadrant Frequency Discriminator[J].Telecommunication Engineering,2015,55(6):658-664.]
Carrier Tracking of High Dynamic BOC Signal Based on
Four-Quadrant Frequency Discriminator
YAN Zhenhua,ZHANG Tianqi,ZHANG Shihui,OU Xudong
(Chongqing Key Laboratory of Signal and Information Processing,Chongqing University of Posts
and Telecommunications,Chongqing 400065,China)
Abstract:For a relatively narrow output frequency range of cross-product discriminator,Doppler shift may not meet its tracking range after capturing the signal.In view of this problem,this paper proposes an algorithm which uses Four-Quadrant Frequency Discriminator(FQFD) to assist mature second-order frequency locked loop(2nd FLL) and third-order phase locked loop(3rd,PLL) model. Firstly,frequency offset of the received signal is drawn to the lower range by using the nonlinear characteristic of the FQFD,and then the FLL is used to eliminate most of the dynamics.Finally PLL with high tracking accuracy is applied to realize the carrier tracking of high dynamic binary offset carrier(BOC) signal rapidly and accurately. According to the analysis of each tracking module algorithm,its own thermal noise error and dynamic adaptability are discussed as well as the optimal bandwidth and other related issues. The theoretical analysis and simulation results show that this method increases about 300 Hz frequency range compared with the original tracking algorithm and it also has a good tracking performance.
Key words:global navigation satellite system;high dynamic BOC signal;carrier tracking;frequency-locked loop;four-quadrant frequency discriminator
作者简介:
中图分类号:TN911.7
文献标志码:A
文章编号:1001-893X(2015)06-0658-07
通讯作者:**yanzh0@163.comCorresponding author:yanzh0@163.com
收稿日期:*2015-01-22;修回日期:2015-04-03Received date:2015-01-22;Revised date:2015-04-03基金项目:国家自然科学基金资助项目(61371164,61275099,61102031);重庆市自然科学基金项目(CSTC2012JJA40008);重庆市杰出青年基金项目(CSTC2011jjj140002);重庆市教育委员会科研项目(KJ120525,KJ130524);重庆市研究生科研创新项目(CYS14140);信号与信息处理重庆市市级重点实验室建设项目(CSTC2009CA2003)Foundation Item:The National Natural Science Foundation of China(No. 61371164,61275099,61102131);The Natural Science Foundation of Chongqing(CSTC2012JJA40008);The Chongqing Distinguished Youth Fundation(CSTC2011jjjq40002);The Research Project of Chongqing Educational Commission(KJ120525,KJ130524);Graduate Research and Innovation Projects of Chongqing(CYS14140);The Project of Chongqing Key Laboratory of Signal and Information Processing(CSTC2009CA2003)
doi:10.3969/j.issn.1001-893x.2015.06.013