搭载机电控制CVT的电子换挡系统设计
2015-02-17刘雪珂
彭 江,马 翔,夏 超,刘雪珂,叶 明,李 鑫
(重庆理工大学 a.车辆工程学院; b.汽车零部件先进制造技术教育部重点实验室,重庆 400054)
搭载机电控制CVT的电子换挡系统设计
彭 江a,马 翔a,夏 超a,刘雪珂a,叶 明b,李 鑫b
(重庆理工大学 a.车辆工程学院; b.汽车零部件先进制造技术教育部重点实验室,重庆 400054)
依据换挡过程的功能要求及控制逻辑为搭载机电控制式CVT电子换挡器开发制定CAN通讯协议。通过制定的通讯协议编写换挡信号收发控制程序并刷写到以MC9S12XS128为核心的控制器中,设计冗余校验装置保证信号传输的可靠性。利用CANoe软件对电子换挡系统进行半物理仿真测试,仿真结果表明:设计的电子换挡系统满足电子换挡器与机电控制CVT之间实时通讯,保证了信号传输的可靠性,提高了控制系统集成度,最终提高了整车的操控性和安全性。
机电控制CVT;CAN总线协议;电子换挡器
机电控制式无级变速器(electric mechanical CVT,EMCVT)作为一项搭载全新技术的CVT,采用碟簧压紧和电机调速,不采用液压系统,解决了传统CVT调速慢、漏液失效的问题,大大提升了系统效率,简化了系统结构[1]。EMCVT中的调速电机、离合器电机采用电信号控制。传统的换挡手柄、传感器与执行机构采用硬线连接会导致线束过于复杂及低可靠性。为减少线束的复杂程度,增强系统的可靠性[2],匹配EMCVT的电子换挡器采用了高速CAN总线通讯以实现挡位信号的传输。该总线技术具有传输效率高、运行可靠、成本低等优点。
本文参照SAE-J1939协议制订了匹配EMCVT电子换挡器的 CAN总线通信协议。设计了以MC9S12XS128单片机为控制器的换挡手柄控制系统;并设计了霍尔传感器系统与脉宽调制检测系统两套不同原理、不同安放位置的挡位检测系统。两套系统同时工作,保证信号检测的可靠性。两路信号分别通过CAN及PWM进行信号发送,同时进行安全性校验,保证换挡手柄信号的安全传输。
1 电子换挡系统设计方案
整个挡位信号传输过程为:驾驶员操纵换挡杆换挡,挡杆位置变化触发霍尔传感器电压变化,换挡控制器采集霍尔传感器信号对比控制器程序预先标定的挡位信号,再通过MSCAN收发器将换挡信号经过CAN总线发送至TCU控制变速器动作[3-5]。系统设计及挡位信号传输框图如图1所示。系统的设计方案主要包括挡位检测方案、控制器硬件设计及软件设计。
1.1 挡位检测方案
由于取消了传统换挡装置上的拉线控制而采用全电信号控制,因此保证换挡信号准确性是极其关键的[6]。为确保电子换挡手柄传感器信号识别的可靠性,防止因信号故障导致换挡手柄无法正常工作,需要对信号的状态进行检测。为此采用冗余校验方式保证换挡准确性。为了校验挡位信号是否正确,设计了一个旋转开关采集挡位信号,经单片机PWM发送信号与霍尔传感器信号进行校验。
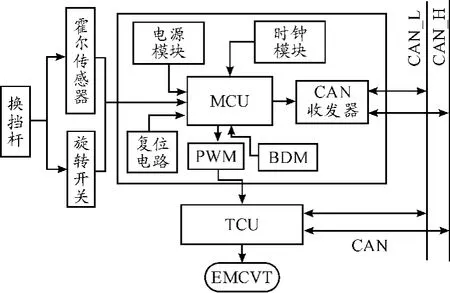
图1 系统设计及挡位信号传输框图
系统采用Allegro公司的开关式霍尔传感器A3241以及ALPS中空旋转编码器共同检测换挡杆的位置。在每个挡位对应位置装设霍尔传感器,换挡杆上装设永磁柱。当换挡杆滑动时,磁柱与对应霍尔元件吸合则输入低电平,用二进制0表示;未吸合则对应输出高电平,用二进制1表示。霍尔传感器挡位编码如表1所示。

表1 挡位编码
中空轴编码器有3个引脚,分别为A,B,C。其中C为电源输入端,A,B两相输出脉冲信号,如图2所示。当换挡手柄顺向或逆向拨动不同角度时,中空轴编码器A,B输出引脚都会输出不同的相脉冲信号,以两相信号的定位稳定点的“ON”或“OFF”组合信息来表示不同的挡位信息。

图2 中空轴编码器及编码原理
1.2 控制器设计方案
电子换挡系统挡位信号采集、发送所需的硬件核心是控制器。本文控制器采用飞思卡尔的MC9S12XS128单片机。为满足系统功能,在单片机芯片的基础上设计了电源及滤波电路、时钟电路、复位电路、BDM电路、看门狗电路及CAN总线接口电路。
1.2.1 电源转换电路
MC9S12xs128单片机的外部供电电压为5 V,而目前汽车上主流的电源电压为12 V和24 V。采用LM2576电源转换芯片设计电源转换电路进行降压处理。J_S是汽车电源输入接口,电源经过保险丝F1和二极管D1输入到电源芯片,将接入的电源转换成5 V。图3为电源转换电路。

图3 电源转换电路
1.2.2 时钟电路
时钟电路是单片机运行所必须的电路,利用晶振产生时钟脉冲。图4为设计的双环控制的皮尔斯时钟电路,其中C1和C2是晶振的滤波电容。为避免时钟信号被干扰,将时钟脉冲放置在靠近MCU的位置,引线设计短而粗。同时为保证晶振电路电容性能稳定,电路远离发热的元器件。
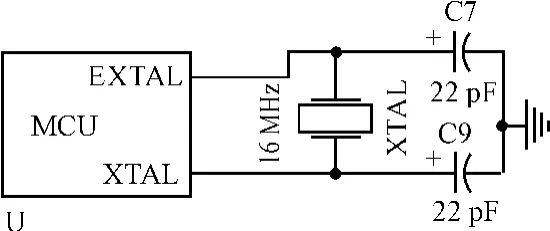
图4 时钟电路
1.2.3 复位电路和BDM电路
单片机复位电路采用MAX809芯片。当芯片的引脚3输入电压低于5 V时,芯片引脚2输出电平由高变为低,使单片机复位[7-9]。BDM是单片机调试和程序刷写的接口。引脚1与单片机的BKGD引脚相连,引脚2接地,引脚4接单片机的RESET,引脚6接电源,电路如图5所示。

图5 复位电路和BDM电路
1.2.4 CAN总线接口电路
CAN总线的接口电路如图6所示。接口芯片采用TJA1050,该芯片的引脚3和引脚2分别为电源的正极和负极,连接5 V电源和地线。引脚1和引脚4组成CAN模块的发送和接收端口,连接单片机的PM1和PM0引脚。引脚7和引脚6连接CAN总线的CANH和CANL。在电路末端添加了汽车专用的共模滤波电感L2,可以有效地滤除CAN总线上的干扰信号。
2 CAN网络总体设计
2.1 网络的拓扑结构
根据汽车电控系统V模型开发流程,依照SAE—J1939通讯协议,设计了电子换挡系统的CAN总线网络。搭载EMCVT的车辆电控系统如图7所示,它主要由动力源及其控制器、CVT及其控制器、整车控制器及其他设备组成。系统的连接主要采用电气连接及CAN总线连接。电气连接主要用于传感器、控制器和执行器之间的信号传输。CAN总线连接主要用于TCU、VCU、ECU 3个控制器与换挡手柄、网关、显示面板间的信息传输。
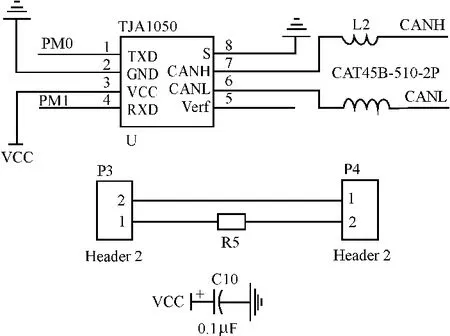
图6 总线接口电路

图7 搭载EMCVT车辆电控系统组成
根据上述搭载EMCVT变速器车辆传动部分电控系统的结构,结合SAE—J1939通讯协议进行总线网络拓扑结构的设计。所设计的总线网络拓扑结构共有6个节点,即发动机、换挡手柄、EMCVT、VCU、显示面板及网关[3-4]。网络节点拓扑结构如图8所示。

图8 网络节点拓扑结构
网络中的地址只能对应1个节点。根据SAE—J1939协议附录B表B2中有关的首选地址定义各自节点的地址[3],如表2所示。
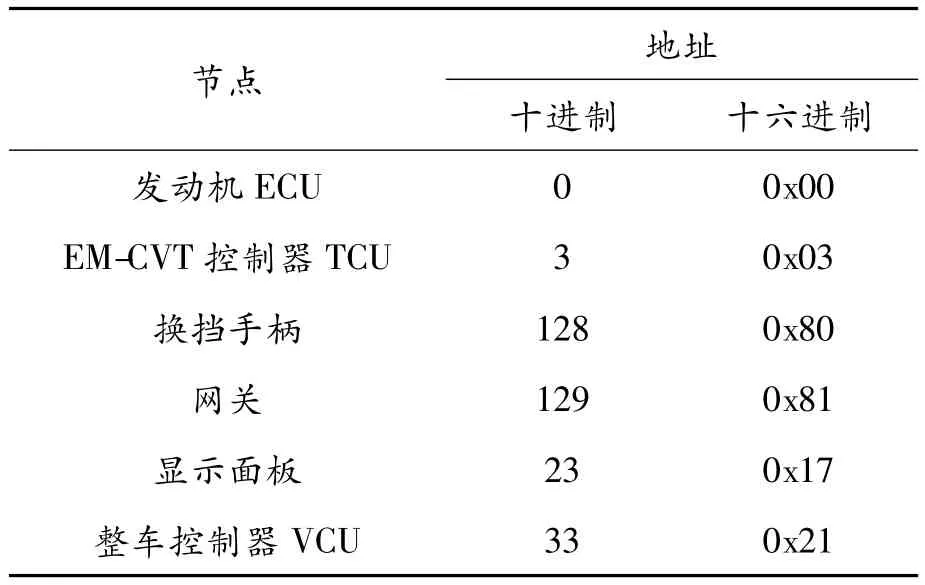
表2 节点地址定义
2.2 应用层的定义
在通讯过程中发动机ECU将转矩、转速、温度等信号发送至CAN总线上,TCU进行EMCVT调速速比的控制,同时将速比、调速的状态等信息发送到CAN总线上。VCU是控制系统的核心,根据控制策略计算发动机目标油门开度、EMCVT目标速比,通过CAN总线发送给发动机 ECU和TCU。也可根据系统的状态实现对油门和制动器的控制。换挡手柄将驾驶员换挡信号传输至CAN总线上以控制变速器的状态。网关接收CAN总线上不同波特率的高/低速信息实现不同层网络间的信息转换与传输,并进行网络管理。显示面板接收并显示CAN总线上发动机转速、车速、发动机温度、变速器挡位等信息。
依照SAE—J1939的协议规定,对系统中的节点、报文、名称、ID、发送周期进行定义[3-5]。根据CAN总线系统的需求,总线上主要包括6个报文。参照SAE—J1939协议中关于报文PDU编码的章节[6],对CAN报文进行编码,制定CAN总线协议,见表3。
2.3 CAN总线网络设计与仿真
2.3.1 CAN总线网络的设计
根据制定的CAN总线协议,利用CANoe软件进行CAN总线网络仿真。在CANdb++中建立包括信号报文环境变量网络节点在内的数据库文件,通过面板编辑器创建和编辑图形化的操作和状态显示面板,利用CAPL编程语言编写各节点的程序,模拟实际节点报文发送、接收处理的过程,从而模拟实际的功能。通过编程定义不同挡位的功能。CANoe中设计流程如图9所示。

表3 CAN总线应用层协议内容

图9 总线网络设计流程
2.3.2 CAN网络功能验证和分析
利用CANoe中的visual-sequence虚拟时序控制器模拟一个汽车行驶的状态。汽车从点火到启动、挂挡行驶、加速、减速、倒车、驻车的全过程控制时序图如图10所示。

图10 控制时序图
仿真过程中利用trace模块追踪换挡信号的变化。由图11可以看出挡位信号与控制信号保持一致。从开始操纵换挡手柄到换挡挡位信号传输至TCU,其时间相差大约是0.5 ms,说明在极短时间内可以实现挡位信号的传输,验证了该电子换挡手柄CAN网络功能的实时性。图12是仿真过程中总线负载率的监测情况。总线负载率均值为6.0%,峰值负载率为7.0%,错误帧为0,总线运行情况良好。由仿真结果可见:设计的电子换挡器CAN总线网络能够满足通讯功能,并且保证了传输的准确性、实时性。
图11 换挡信号追踪图

图12 总线负载率
3 电子换挡系统程序设计
在主程序中主要完成以下内容:初始化寄存器;开启中断;调用初始化定时器子函数;调用初始化CAN模块子函数;循环查询I/O口状态是否改变,若改变,调用相应的子程序,执行相关的操作。具体应包括定时器工作模式设置,中断优先级设置,定时器设置(定时器工作方式、定时时间),外部中断的开关,中断的使能等。
3.1 CAN模块初始化
CAN控制器初始化是对控制寄存器、接收屏蔽器、传输波特率控制、错误软件检测控制、传输控制、接收控制以及数据接收缓冲器等进行初始化。CAN模块初始化流程如图13所示。

图13 CAN模块初始化流程
根据已制定的挡位信号标识符在CAN模块应用层程序中定义报文ID及传感器检测信号对应的挡位[10-15]。由于在 CAN通信时采用的SAEJ1939编码标识符与控制器中标识符寄存器的位不是一一对应,需要将Jl939变为CAN标识符寄存器的编码。系统中换挡手柄挡位信号报文标识符为0x080001F2,对应写入CAN标识符寄存器的ID为0x4000F102。CAN0模块的初始化子函数代码如下:

3.2 挡位信号CAN发送子和接收子程序
在CAN控制系统的通信设计中,将挡位信号的发送和接收设计为子程序形式,当检测到挡位变化并传递信号时,调用相应的接收或发送任务。CAN模块接收子程序与CAN模块的发送子程序类似,不再赘述。
CAN模块初始化后,CAN0模块的发送子程序代码如下:

3.3 程序调试与刷写
完成上述程序设计后,运用BDM调试器,选择TBDML调试工具完成调试工程,应用keil生成Hex文件,将程序刷写到换挡手柄控制器电路板上。
4 电子换挡系统测试
4.1 连接硬件设备
将已经刷好程序的控制器与换挡手柄连接,控制器通过CANcaseXL与计算机上的CANoe软件进行通讯,其硬件设备连接方式如图14所示。换挡手柄的控制器MC9S12XS128由电源供电,CAN高和CAN低两引脚通过DB9连接头与CAN-caseXL的通道相互连接,CANcaseXLz再通过USB连接线与电脑进行连接[16-20]。硬件连接实物如图15所示。
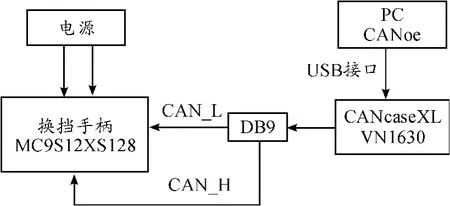
图14 硬件设备连接方式

图15 硬件连接实物
4.2 电子换挡系统仿真
通过CANoe软件对设计的电子换挡系统进行半物理仿真。在前文所述CAN总线仿真配置基础上,在CANoe软件的Simulation仿真窗口将换挡手柄节点改成虚拟节点。启动CANoe,通过换挡手柄发出PRNDS挡位信号,根据各个节点相应的程序,发动机节点、TCU节点会接收到相应的信号,TCU发出换挡操作执行命令,使得调速电机、离合器电机开始工作。
通过CANoe中Trace界面就可以得到相应的报文信息,如图16所示。在控制面板中可以得到相应的挡位变化信号以及仪表显示,如图17所示。仿真结果表明:设计的电子换挡系统能够匹配新型EMCVT的各个挡位的换挡需求。

图16 报文信息

图17 挡位信号以及仪表显示
5 结束语
本文针对搭载EMCVT电子换挡器的车辆设计了基于CAN总线的电子换挡系统,对其硬件、软件以及通讯协议进行了详细的设计,通过信号故障处理和策略冗余算法设计了电子换挡手柄CAN总线信号和霍尔器件进行校验的可靠性控制方法。仿真分析结果表明:设计的换挡控制系统实现了挡位信号在换挡手柄与EMCVT之间的实时高效安全通讯,并成功实现换挡操作。
[1]叶恒杰,李兰君,樊勇.基于CANoe的汽车仪表系统仿真和故障分析[J].中国仪器仪表,2012(2):53 -55.
[2]汪东坪,李舜酩.混合动力汽车电子换挡手柄控制信号可靠性设计[J].农业机械学报,2012(6):25-29.
[3]马付屹,郭朋彦,张瑞珠,等.基于CANoe的AMT汽车动力总成控制系统CAN通信设计[J].汽车电器,2015(2):34-36.
[4]吴立松.CAN总线智能节点设计[D].哈尔滨:哈尔滨理工大学,2009.
[5]任锐.CAN总线通讯协议设计[J].兵工自动化,2007 (3):50-58.
[6]陈彩霞.汽车电子排挡控制系统设计[D].长沙:湖南大学,2013.
[7]The Truck&Bus Control and Communications Network Sub committee of the Truck&Bus Electrical Committee. Vehicle ApplicationLayer,SAE J1939-71[S].
[8]叶明,李鑫,程越.搭载机电控制CVT的电动车快速控制原型[J].中国公路学报,2015(1):112-119.
[9]陈彩霞.汽车电子排挡控制系统设计[D].长沙:湖南大学,2013.
[10]周晓翠.汽车电子排挡电路设计及电磁分析[D].长沙:湖南大学,2012.
[11]黄蒙,吴光强.自动变速器换挡杆电子控制器设计研究[J].测控技术,2011(4):63-66,69.
[12]刘伟,徐进章,孔慧芳.基于MC9S08DZ60的AMT手柄ECU的设计[J].微型机与应用,2011(7):104 -106.
[13]查晓辉.汽车无级变速传动系统的电子控制单元的研究[D].重庆:重庆大学,2004.
[14]和卫民.基于AMT的换挡手柄ECU的系统设计[D].长春:吉林大学,2006.
[15]蔡花,朱宏翔.基于MC9S12X的CAN通讯的底层代码设计[J].汽车实用技术,2015(1):4-6.
[16]杨胜兵,严新平,吴超仲,等.基于CAN总线的汽车换挡检测系统设计[C]//2009中国汽车工程学会年会论文集.北京:中国汽车工程学会,2009:4.
[17]宋磊,郑荣良.汽车局域网CAN总线在客车上的应用研究[J].江苏大学学报:自然科学版,2002(2):55 -58.
[18]张勇,陆勇.CAN总线在车身低速电器中的应用[J].重庆理工大学学报:自然科学版,2010(6):5-8.
[19]韩成浩,高晓红.CAN总线技术及其应用[J].制造业自动化,2010(2):146-149.
[20]鲍官军,计时鸣,张利,等.CAN总线技术、系统实现及发展趋势[J].浙江工业大学学报,2003(1):60-63,68.
(责任编辑刘 舸)
Design of Electronic Shifting System for Vehicle Equipped with Electric Mechanical CVT
PENG Jianga,MA Xianga,XIA Chaoa,LIU Xue-kea,YE Mingb,LI Xinb
(a.College of Vehicle Engineering;b.Key Laboratory of Advanced Manufacturing Technology for Automobile Parts,Ministry of Education,Chongqing University of Technology,Chongqing 400054,China)
Under the functional requirements and the related control logic of electronic shifting system which mounted on the vehicle equipped with electric mechanical CVT,the CAN communication protocol was formulated.Shift signal transceiver control program was written by communication protocol and it was flashed to MC9S12XS128.Redundancy check device was designed to ensure the reliability of signal transmission.The CANoe was used to perform the semi-physical simulation.The result shows that the designed system is in real-time specification for the communication between electric shifting device and EMCVT,and the system guarantees the reliability of signal transmission,and improves thecontrol system integration and the vehicle handling and safety ultimately.
electric mechanical CVT;CAN bus protocol;electronic shift
U483
A
1674-8425(2015)11-0028-09
10.3969/j.issn.1674-8425(z).2015.11.006
2015-09-10
国家自然科学基金资助项目“机电无极自动变速插电式混合动力系统综合控制研究”(51275549);重庆市科技攻关计划项目“电动汽车集成式动力总成系统开发”(cstc2012gg-yyjsb60002);重庆理工大学研究生创新基金资助项目(YCX2014102)
彭江(1989—),男,湖北恩施人,硕士研究生,主要从事车辆传动系统及控制研究。
彭江,马翔,夏超,等.搭载机电控制CVT的电子换挡系统设计[J].重庆理工大学学报:自然科学版,2015 (11):28-36.
format:PENG Jiang,MA Xiang,XIA Chao,et al.Design of Electronic Shifting System for Vehicle Equipped with Electric Mechanical CVT[J].Journal of Chongqing University of Technology:Natural Science,2015(11): 28-36.
