基于Matlab和模糊PID的汽车ABS系统的研究
2015-02-06吴玲闻凯董敏南京航空航天大学金城学院南京211156
吴玲,闻凯,董敏(南京航空航天大学金城学院,南京 211156)
基于Matlab和模糊PID的汽车ABS系统的研究
吴玲,闻凯,董敏(南京航空航天大学金城学院,南京 211156)
为提高汽车ABS系统的制动性能,本文提出了一种基于Matlab和模糊PID控制算法的汽车ABS系统。在Matlab/Simulink环境下搭建了以单轮车辆为对象的汽车的纵向动力学模型,并分别设计了PID控制器、模糊控制器和模糊PID控制器,对汽车在低速30km/h、中速70km/h和高速110km/h行驶情况下紧急制动过程进行了仿真研究。仿真结果表明:基于模糊PID控制器的ABS系统能实时地对参数进行调节,其制动性能优于PID控制器和模糊控制器,能保持车轮工作在最佳滑移率附近,缩短制动距离并有效改善制动时的方向稳定性。
ABS;防抱死制动系统;模糊PID控制;建模;MATLAB仿真
1 引言
汽车防抱死制动系统(ABS)是一种在紧急制动情况下缩短汽车制动距离,同时保持汽车方向稳定性的装置。它已广泛应用在各种车辆上,并成为汽车主动安全控制的一个重要研究方向。而ABS控制器是ABS装置的核心,现有的控制算法有逻辑门限值控制、PID控制、滑膜变结构控制、神经网络控制和模糊控制[1,2]。模糊控制因不受制于控制对象的精确模型,且具有较强的鲁棒性和适应性已成为ABS控制算法的研究热点,但是普通模糊控制自身仍不能很好地消除系统稳态误差,控制精度也不够高。PID控制算法结构简单,稳定性好且控制精度高,但由于车辆状况多变及轮胎非线性等因素导致其参数匹配困难,且易产生超调。因此,采用模糊PID控制算法,能够充分发挥两种算法的优点。
2 汽车ABS系统的数学模型
2.1 车辆动力学模型
根据不同的研究目的,可建立多种车辆模型。本文主要研究ABS系统的制动性能,采取经典的单轮车辆模型[3],忽略空气阻力、载荷阻力和滚动阻力,也不考虑悬架系统和转向系统的影响。由图1受力分析可得车辆动力学方程:
式中:M为1/4整车质量(kg),v为汽车行驶速度(m/s),F为纵向摩擦力(N),I为车轮的转动惯量(kg·m2),
2.2 轮胎模型
轮胎模型是指在车辆制动过程中轮胎的地面附着力与其它各种参数之间的函数关系式,通常用轮胎的地面附着系数与各种参数间的函数关系式来表示。而影响附着系数的因素很多,除滑移率外,路面材料及状况,轮胎结构、材料以及汽车行驶速度等都有一定影响。这里考虑对附着系数影响较大的因素建立双线性模型[3]表达式如下:
2.3 制动系统模型
汽车制动系统由传动机构和制动器两部分组成。传动机构主要是指液压传动系统,建立其模型时,忽略电磁阀弹簧的非线性因素及压力传送的延迟,可将液压传动系统简化为一个电磁阀和一个积分环节[3]。传递函数可表示为:

制动器模型指制动器力矩与制动系气液压力之间的关系。假设制动器为理想元件,忽略滞后性带来的影响。则制动器方程可表示为:
2.4 滑移率计算模型
3 模糊PID控制器的设计
3.1 PID控制器模型
PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。该控制器的3个调节参数和的选取直接影响了控制效果。控制器框图[5]如图2所示。

图2 PID控制器框图
PID控制器根据系统的偏差,通过将比例P、积分I和微分D线性组合构成控制量,以控制被控对象。其控制率为:式中,为比例系数;为积分时间常数;为微分时间常数。仿真模型如图3所示。


图3 PID控制器模型
3.2 模糊控制器的设计
模糊控制器的基本结构通常由四个部分组成:模糊化、知识库、模糊推理和解模糊化,结构框图如图4所示。
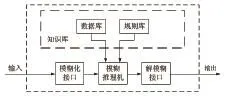
图4 模糊控制器原理框图
在模糊控制器的设计中选取轮胎滑移率的期望值与实际值的误差和误差的变化率为输入变量,制动压力为输出变量。并设置滑移率误差、误差变化率以及制动压力的模糊子集均为{NB,NM,NS,Z,PS,PM,PB},子集中元素分别表示{负大,负中,负小,零,正小,正中,正大}。其中误差、误差变化率的论域均为[-5,5],控制量的论域为[-1,1]。输入、输出的各语言变量均选取灵敏度较高的trimf隶属度函数。输入输出的隶属函数如图5、图6所示。
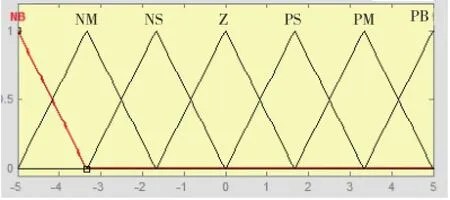
图5和的隶属度函数
结合对汽车ABS控制的一些专家经验,制定了49条模糊控制规则,如表1所示。例如:第一条规则表述为:当=NB,=NB时,则=NB,即If (is NB) and (is NB) then (is NB)。然后依次输入所有模糊控制规则。最后还要进行解模糊化将模糊控制量换算为精确控制量输入给执行机构,这里选取重心法。
表1的模糊规则控制表

表1的模糊规则控制表
模糊控制器仿真模型如图7所示。

图7 模糊控制器仿真模型
3.3 模糊PID控制器的设计
模糊PID控制器由两部分组成:参数可调整的PID控制器和模糊控制器。其中模糊控制器仍以误差和误差变化率作为输入,根据模糊控制原理来对、和三个参数在线调整,以满足不同时刻的和对控制参数的要求,而使被控对象具有良好的动态性能。模糊PID控制器的结构[6]如图8所示。

图8 自适应模糊PID控制器框图
3.3.1 隶属度函数的确定
根据PID参数的自整定原则,用于整定PID参数的模糊控制器为两输入三输出,即输入变量为误差和误差变化率,输出变量为PID控制器的三个参数、和。由实际汽车ABS系统的工作状况及经验总结,定义输入语言变量和的论域均为[-6,6],变化范围分别为[-0.2,0.2]、[-12,12],其模糊子集均为{NB,NM,NS,ZE,PS,PM,PB},各元素分别表示{负大,负中,负小,零,正小,正中,正大};定义输出语言变量、和的论域均为[0,1],其模糊子集为{ZE,PO,PS,PM,PB},各元素分别表示{零,零正,正小,正中,正大}。每一个语言变量选择均为具有较高灵敏度的trimf隶属函数类型。输入、输出隶属函数如图9、图10所示。

图9和的隶属度函数

图10、和的隶属度函数

3.3.2 确定模糊控制规则
表2的模糊规则表

表2的模糊规则表
表3的模糊规则表
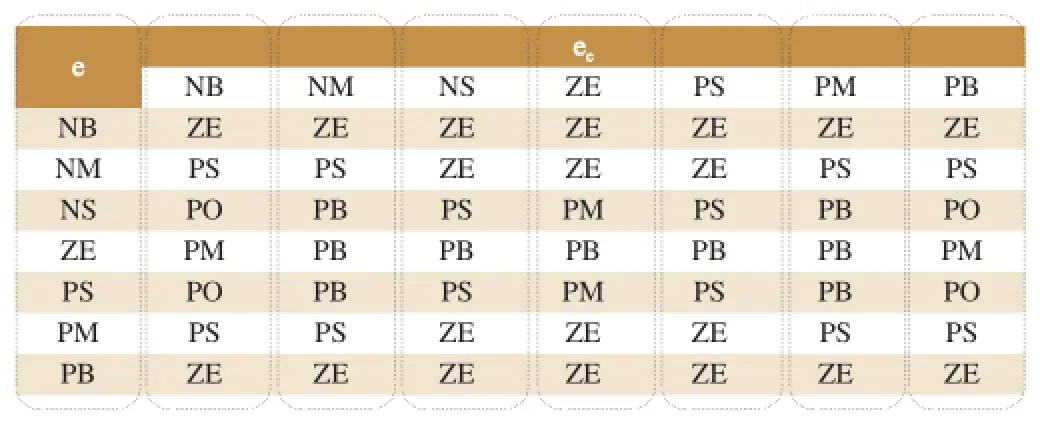
表3的模糊规则表
表4的模糊规则表

表4的模糊规则表
3.3.3 解模糊化
根据模糊控制规则进行模糊推理后,整定的3个修正参数要进行反模糊化计算得到精确的输出控制量。本文采用工业控制中广泛使用的解模糊化方法——重心法[6]求取。计算方法如下:

自适应模糊PID控制器仿真模型如图11所示。

图11 自适应模糊PID控制器仿真模型
4 汽车ABS系统仿真及结果分析
4.1 汽车ABS系统仿真
在Matlab/Simulink环境下搭建出系统仿真模型[7],基于各个控制器的汽车ABS系统模型如图12所示。

图12 基于控制器的汽车ABS系统仿真模型
本文所采用的仿真参数如表5所示[6]。

表5 仿真车辆参数
4.2 仿真结果分析
本文对无ABS的系统和分别采用传统PID控制器、模糊控制器和模糊PID控制器的ABS系统分别在30km/h、70km/h和110km/h的行驶速度下进行了仿真分析,设置仿真时间为5.0s,当汽车行驶速度减小为零时,仿真停止。所得仿真曲线如图13(a)、(b)、(c)所示。
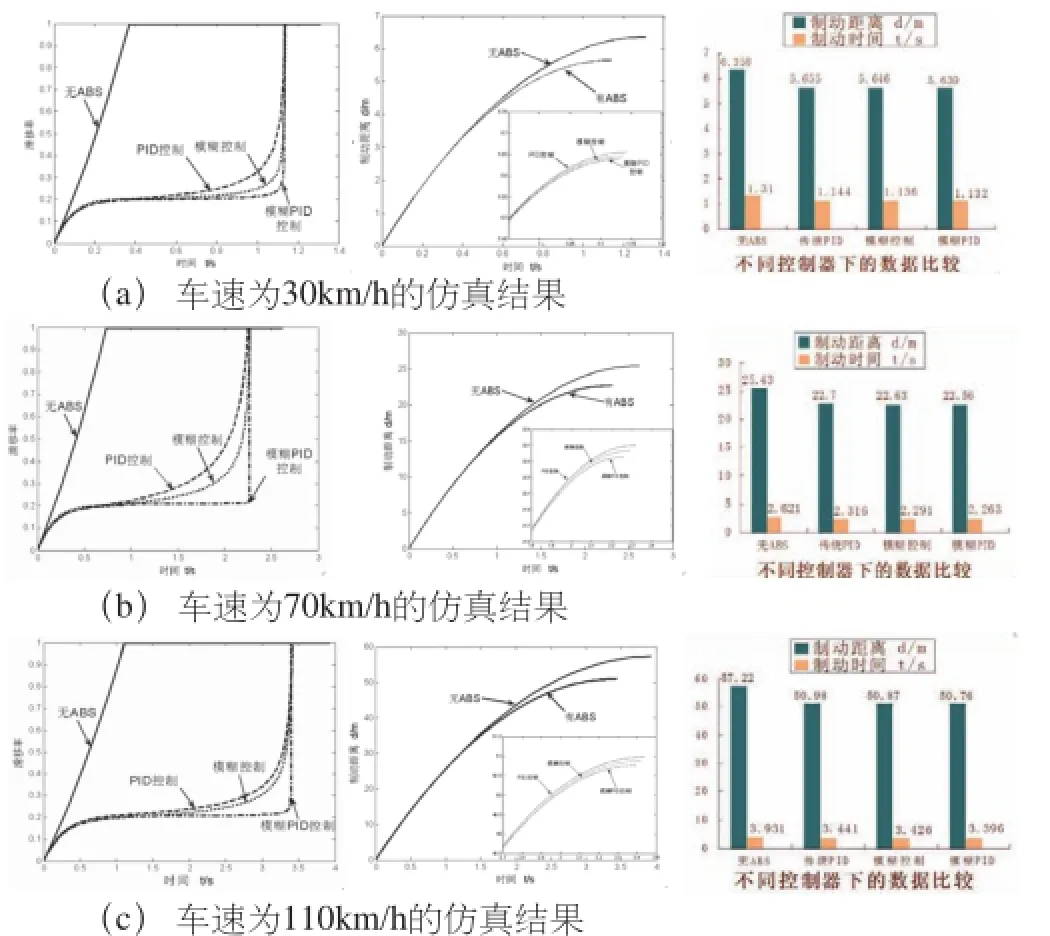
图13 仿真曲线
从以上仿真曲线及仿真数据可以看出:在整个制动过程中,汽车ABS控制器能够很好地发挥防抱死的作用,将滑移率控制在最佳滑移率0.2左右,保证制动过程中轮胎能够获得最大的地面制动力,缩短制动距离,减小制动时间,提高制动效率。
同时,从仿真曲线可以看出,基于不同控制器的ABS系统在制动过程中,无论是在低速、中速还是高速都能将滑移率很好地维持在0.2~0.3左右,体现了良好的制动性能。其中模糊PID控制器下的滑移率超调量最小,响应速度最快。也就是说,模糊PID控制器比传统PID控制和模糊控制的制动效果更好,能更快地达到最佳滑移率并保持平稳,保证轮胎能够获得最大的地面制动力,从而得到更短的制动距离。
5 结语
本文针对汽车ABS系统分别设计了传统PID算法、模糊控制算法和模糊PID控制算法,并在Matlab/Simulink环境下对汽车ABS系统单轮模型进行了建模与仿真分析。仿真结果表明汽车ABS系统具有良好的制动效果,所设计的模糊PID控制器具有最佳制动性能。ABS系统对行驶安全性起着至关重要的作用,因此本文对ABS系统的仿真研究具有重要的理论和实践意义。
[1] 崔胜民. 现代汽车系统控制技术[M]. 北京: 北京大学出版社, 2008.
[2] 张颖, 袁朝辉. 汽车防抱死系统的模糊PID控制算法研究[J]. 计算机仿真, 2010, 27 ( 12 ) : 312 - 315.
[3] 胡启国, 任龙. 车辆ABS参数自调节模糊PID控制仿真[J]. 重庆交通大学学报(自然科学版), 2012, 31 ( 2 ) : 344 - 351.
[4] 李南, 宋真玉, 马亚乾. 基于实时滑移率的汽车防抱死系统仿真[J]. 轻型汽车技术, 2012 ( 11 – 12 ) : 18 - 22.
[5] 聂晋, 周萍. 基于PID控制的ABS仿真研究[J]. 山东交通学院学报, 2010, 18 ( 04 ) : 6 - 9.
[6] 包套图. 基于模糊PID控制算法的汽车制动系统[J]. 应用科技, 2012, 39 ( 5 ) : 71 - 74.
[7] 黎明安. Matlab/Simulink动力学系统建模与仿真[M]. 北京: 国防工业出版社, 2012.
Research on the Anti-lock Braking System of Automobiles Based on Matlab and Fuzzy PID
In order to improve the braking performance of ABS, a control algorithm based on matlab and fuzzy PID was proposed in this paper. The longitudinal dynamics models of automobile based on single wheel vehicle were established in the Matlab/Simulink environment. And PID controller, fuzzy controller and fuzzy PID controller were designed respectively. Aiming at vehicles of low speed of 30m/s, medium speed of 80m/s and high speed of 130m/s driving cases, the emergency braking process were simulated and studied. The results show that the designed fuzzy PID control algorithm is able to adjust the parameters in real time. This braking performance is superior to the traditional PID controller and Fuzzy controller. It can shorten braking distance, keep the wheel working at the optimal slip ratio and improve the direction stability effectively.
ABS; Anti-lock braking system; Fuzzy PID control; Modeling; Matlab emulation
B
1003-0492(2015)04-0082-04
TP273+.4
江苏省高等学校大学生实践创新训练计划项目资助(201413655005Y)
吴玲(1984-),女,湖北人,讲师,硕士(在读博士),现就职于南京航空航天大学金城学院,主要研究方向为汽车导航控制。
闻凯(1983-),男,江苏人,讲师,硕士,现就职于南京航空航天大学金城学院,主要研究方向为智能控制。
董敏(1979-),女,山东人,讲师,硕士,现就职于南京航空航天大学金城学院,主要研究方向为故障诊断与容错控制。
