降低UV激光打孔机Z轴振幅的瞬态动力学有限元分析技术研究
2015-02-05林小夏余廷勋广东正业科技股份有限公司广东东莞523808
林小夏 高 垒 余廷勋(广东正业科技股份有限公司,广东 东莞 523808)
降低UV激光打孔机Z轴振幅的瞬态动力学有限元分析技术研究
Paper Code: S-084
林小夏 高 垒 余廷勋
(广东正业科技股份有限公司,广东 东莞 523808)

针对UV激光打孔机Z轴系统在加减速运动过程中的振动问题,文章运用瞬态动力学有限元分析技术,建立了UV激光打孔机Z轴系统瞬态动力学有限元模型,对Z轴系统进行瞬态动力学分析。分析了Z轴系统的主要零部件(包括振镜,各反射镜以及CCD相机机座等)的振动特性。根据分析结果,对UV激光打孔机Z轴系统进行了优化和改进,很好控制了Z轴系统主要零部件在加减速运动过程中的振幅。从而提高激光打孔的精度,有效提升产品的性能。
紫外激光打孔机;有限元分析;瞬态动力学;振动特性;优化设计
1 引言
有限元法就是将一个复杂的连续体求解问题,采用先分后合的方法,将它的求解区域划分为有限个形状相对简单的单元所组成的集合体(或称离散化),每个单元之间通过其节点相互联系。使得原先是无限自由度的连续问题,变成了有限个自由度的问题。随着计算机技术的飞速发展, 有限元技术作为一种工程分析工具,在工程技术领域得到了迅速推广和广泛应用[1]-[3],受到越来越多企业的青睐。通过有限元分析,能够在产品加工制造前预先发现潜在的问题,确保产品设计的合理性,并通过优化设计,找出产品设计最佳方案。通过有限元分析,能模拟各种试验方案,有效减少试验时间和经费,为快速研发和提高产品性能提供理论支持。
UV激光打孔机主要应用于HDI板、挠性板钻一阶盲孔、二阶盲孔、通孔等。UV激光打孔机钻孔速度快,孔型质量好,可靠性稳定性高。由于UV激光打孔机Z轴系统需要在横梁上作快速往返运动。在较大的加速度和惯性力等作用下,Z轴系统的零部件(包括振镜,各反射镜以及CCD相机机座等)会产生振动,振镜和反射镜的微小振动,都会影响激光束光路的走向以及聚焦,从而影响激光打孔的精度和效果。为此,通过有限元仿真技术,对UV激光打孔机Z轴系统进行瞬态动力学有限元分析,分析UV激光打孔机Z轴系统在加减速运动过程中的振动特性。并对UV激光打孔机Z轴系统进行了优化和改进,降低了Z轴系统主要零部件在加减速运动过程中的振幅。从而提高激光打孔的精度,有效提升产品的性能。
2 Z轴系统瞬态动力学有限元模型的建立
瞬态动力学分析能够得到任何结构关于时间载荷的响应[4][5]。不同于一般的瞬态分析,瞬态动力学模型还可以添加运动副。零件与零件之间可以产生宏观的相对位移。运动副是两构件直接接触并能产生相对运动的活动联接。不同于刚体动力学分析,瞬态动力学的模型可以是刚体,也可以是柔性体,对于柔性体,还可以考虑材料的非线性特征,最终就能得到柔性体的应力,应变以及位移的响应。
建立UV激光打孔机有限元分析模型,既要保证建模的准确性,同时也要对模型进行必要的简化,以提高建模和求解效率。
对Z轴系统添加一个X方向的移动副。允许Z轴系统可以在X轴直线电机上进行来回运动。Z轴系统的运动速度曲线如图1所示。
由Z轴系统速度曲线可得,在0.004 s到0.006 s,Z轴系统作匀加速运动,加速度为12/(0.006-0.004)=6000 mm/ s2,在0.006s到0.008s,Z轴系统作匀减速运动,加速度为-12/(0.008-0.006)=-6000 mm/s2。Z轴系统运动的位移为12(0.008-0.002)/2=0.024 mm。UV激光打孔机瞬态动力学有限元分析模型,载荷以及约束如图2所示。各实体部分的材料的参数表如表1所示。

图1 Z轴系统的运动速度曲线
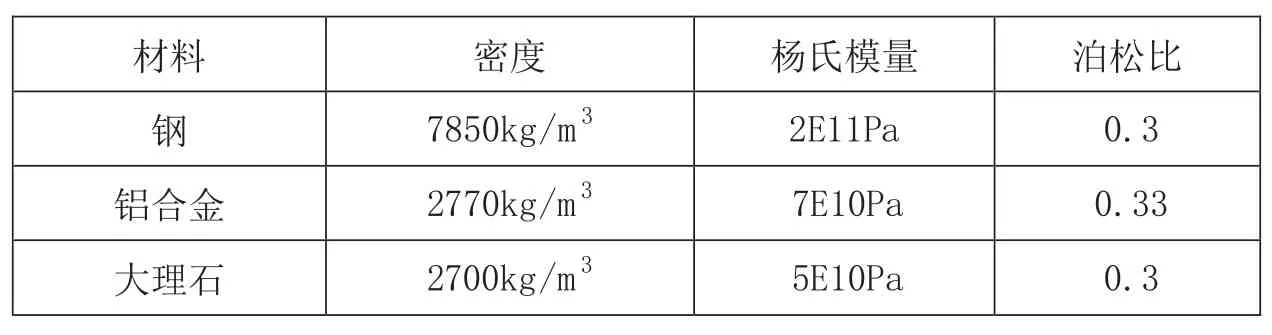
表1 材料参数
3 UV激光打孔机Z轴系统振动特性分析
对UV激光打孔机Z轴系统进行瞬态动力学有限元分析。得到Z轴系统在加减速状态下的动力学响应。表2分别是振镜,第二反射镜机座,第三反射镜机座以及CCD相机机座在三个方向上的振幅。

表2 Z轴系统各零部件三个方向上的振幅
振镜X方向的振幅为0.0247 mm-0.024 mm=0.0007 mm,Y方向的振幅为0.0022 mm,Z方向的振幅为0.0045 mm。位移振幅曲线可知,Z方向的振幅属于整体振动。对于振镜以及各反射镜,我们一般要将X、Y、Z三个方向的振幅控制在0.005 mm之内。因此振镜X、Y、Z三个方向振幅都比较小,满足要求。
第三反射镜机座X方向的振幅为0.0246 mm-0.024 mm=0.0006 mm,Y方向的振幅为0.003 mm,Z方向的振幅为0.0045 mm。从图4中位移振幅曲线可知,Y、Z方向的振幅属于整体振动。因此第三反射镜机座X、Y、Z三个方向振幅也比较小,满足要求。
CCD相机座X方向的振幅为0.0376 mm-0.024 mm=0.0136 mm,Y方向的振幅为0.0118 mm,Z方向的振幅为0.089 mm。因此CCD相机座X、Y、Z三个方向振幅都比较大。需要对其进行加强改进。
第二反射镜机座X方向的振幅为0.0034 mm,Y方向的振幅为0.0027 mm,Z方向的振幅为0.0071 mm。第二反射镜机座X、Y方向的振幅比较小,但Z方向的振幅比较大。因此需要对其进行加强改进。
4 UV激光打孔机改进设计以及分析
由以上分析可得,振镜和第三反射镜机座X、Y、Z三个方向的振幅都比较小。CCD相机座三个方向的振幅都比较大。第二反射镜机座Z方向的振幅也比较大。需要对其进行改进和优化。改进优化方案主要包括以下几方面:(1)在CCD相机座根部增加一块加强筋;(2)增加第二反射镜机座三角肋板的高度;(3)对横梁的底座进行了加强。
通过改进优化后,振镜,第二反射镜,第三反射镜机座以及CCD相机机座在三个方向上的振幅都有所减小。特别是CCD相机机座以及第三反射镜机座,其振幅有了明显的减小。Z轴系统在加减速状态下的振动性能得到提高。表3是Z轴系统各零部件改进前与改进后的振幅对比。

表3 Z轴系统各零部件改进前与改进后的振幅对比
通过改进和优化,薄弱的地方得到了加强。Z轴系统各零部件在加减速状态下的振幅得到了控制,从而提高激光打孔的精度,有效提升产品的性能。
5 结语
本文运用瞬态动力学有限元仿真分析技术,对UV激光打孔机Z轴系统进行了有限元分析和结构优化,研究工作的成果有以下两个方面:
(1)运用有限元方法,建立了UV激光打孔机Z轴系统瞬态动力学有限元模型,对Z轴系统进行瞬态动力学分析。分析了Z轴系统的主要零部件(包括振镜,各反射镜以及CCD相机机座等)的振动特性。
(2)根据分析结果,对UV激光打孔机Z轴系统进行了优化和改进,提出改进方案,对CCD相机座,第二反射镜机座以及横梁底座进行加强。优化和改进后,降低了Z轴系统主要零部件在加减速运动过程中的振幅。从而提高激光打孔的精度,有效提升产品的性能。
[1] HODOLIC J, MATIN I, STEVIC M, et al. Development of Integrated CAD/CAE System of Mold Design for Plastic Injection Molding [J]. Material Plastic, 2009, 46(3)∶ 236-242.
[2] YAGMUR L, BAGLIE F. Experimental and dimensional characterization of a Prototype Piston-cylinder unit and validation using finite element analysis (FEA) [J]. Measurement, 2009, 42(5)∶ 678-684.
[3] H. Pries and H. Chr. Wille, Some examples of modern vehicle design analysis by the finite element method, Int. J. of Vehicle design, Vol. S, nos. l/2, 1984, Printed in U.K
[4] 王玉飞. 拆除机器人结构的瞬态动力学分析[J]. 装备制造技术, 2010, 8∶ 30-32.
[5] 王锋, 马大为, 冯勇等. 基于瞬态动力学分析的某装备改装研究[J]. 系统仿真学报, 2007, 1∶ 194-196.
林小夏,博士,广东正业科技股份有限公司仿真高级工程师,从事产品设计,性能分析与仿真优化工作。
Transient dynamic finite element analysis technology research for reducing the amplitude of UV laser drilling machine Z axes system
LIN Xiao-xia GAO Lei YU Ting-xun
Aiming at the problem of vibration to the UV Laser Drilling Machine Z axes system, applying the transient dynamic finite element method, a transient dynamic finite element analysis model of the UV Laser Drilling Machine Z axes system has been set up. This paper first makes research on the vibration characteristic of the UV Laser Drilling Machine Z axes system (includes the scanning mirror, each speculums and CCD camera base). Then, according to the simulation results, it does the optimization and improvement design to the Z axes system. After the improvement design, the amplitude of the scanning mirror, each speculums and CCD camera base has been reduced during acceleration and deceleration. So the Laser drilling accuracy and the product performance has been improved a lot effectively.
UV Laser Drilling Machine; Finite Element Analysis; Transient Dynamic; Vibration Characteristic; Optimization Design
TN41
A
1009-0096(2015)03-0060-04
