Galileo在轨验证卫星的性能研究
2015-01-28宋玉石袁国良
宋玉石 , 张 云 , 袁国良
(1.上海海事大学 上海 201306;2.上海海洋大学 上海 201306)
Galileo卫星导航系统是由欧盟研发的面向民用领域的全球导航卫星定位系统,它能提供全球性、高精度、可靠性的导航定位服务,并且能与GPS系统、Glonass系统互操作。Galileo系统的空间部分由分布在3个椭圆形轨道上的30颗MEO(Medium Earth Orbit)卫星组成,每个轨道上分布着 9颗工作卫星和一颗备用卫星,卫星轨道的平均高度约为23 222 km,轨道平面同地球赤道面的夹角约为56度,卫星绕地球运行的轨道周期为14小时[1],在Galileo系统星座部署完毕后,Galileo信号能够对纬度75度乃至更高的地区也能提供较好的覆盖。
Galileo系统的建设分为4个阶段。第一阶段为伽利略系统测试平台,其中两颗Galileo在轨验证元素卫星GIOVE A、GIOVE B分别于 2005年 12月28日和 2008年 4月27日发射升空并取得了良好的实验效果;第二阶段为在轨验证阶段(In-Orbit Validation,IOV),首批两颗 IOV 卫星 E11、E12于2011年10月21日发射升空,另外两颗IOV卫星E19、E20于2012年10月12日发射,这四颗卫星是Galileo星座的组成部分[2];第三阶段为初步运行阶段,在本阶段运行有18颗卫星并能提供OS、SAR、PRS服务;第四阶段为完全操作能力阶段,本阶段30颗卫星部署完毕并提供全部五种服务。
文中通过分析实际接收到的IOV卫星的数据,从信噪比、多路径误差及定位精度3个方面对其性能进行分析并用GPS系统作为对比。
1 数据采集
文中对实验数据的采集使用的是Novatel公司生产的Flexpak6接收机和GNSS750天线,GNSS750天线支持对GPS L1、L2、L5 频率,Galileo E1、E5a、E5b、E6 频率的接收。 天线被安装在上海海洋大学信息学院楼顶,参考坐标是 [纬度30.888281374度,经度 121.894303499度,高度 40.2541米],由于上海地区每天能捕获到的Galileo IOV卫星的时间较短,因此采集了3天中全天24小时的数据,数据采集信息如表1中所示,Galileo IOV卫星在3月15日的天顶视图如图1中所示。
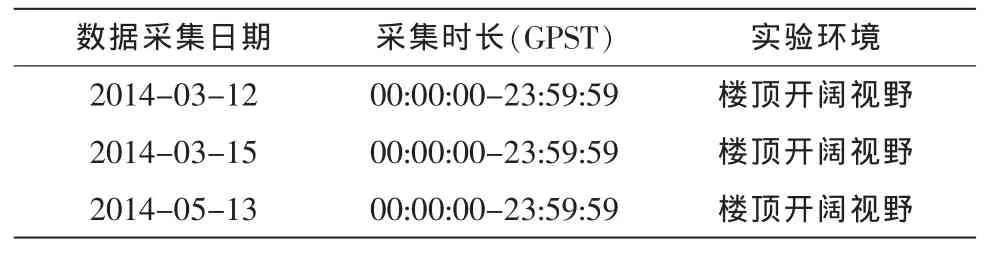
表1 数据采集信息Tab.1 Data acquisition inform ation
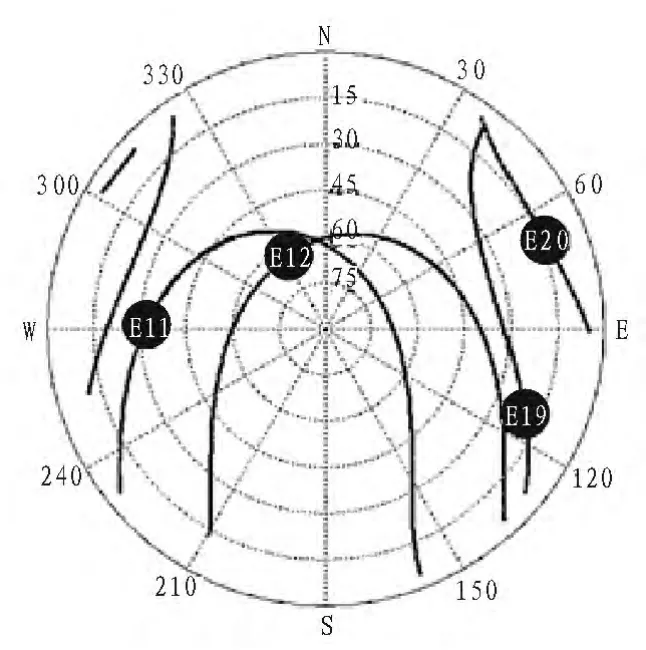
图1 Galileo IOV卫星天顶视图Fig.1 SkyPlot of Galileo IOV satellites
2 性能分析
2.1 信噪比
卫星信号的信噪比(SNR)是指接收到的载波信号的强度与噪声信号强度的比值,它能反映信号的质量,通常接收机用来表示SNR[3],单位为dB-Hz。此处选取了E11卫星进行信号强度分析并用G11卫星作为对比,图2纵坐标为信噪比、横坐标为仰角。为具体分析从低仰角到高仰角变化时信号信噪比的特点,本文选取了两颗卫星在仰角跨度较大的第二天中的数据进行分析,而且由于仰角跨度较大本文对仰角每隔一度采样一次对应仰角的信噪比。
如图2中所示,E11卫星的仰角跨度为9~70度,四路信号的信噪比跨度分别为 47~52 dB-Hz、43~52 dB-Hz、43~52 dB-Hz、39~49 dB-Hz, 当 E11 卫星的仰角低于 60 度且在同一仰角时E1信号的信噪比始终最大,E5a、E5b的信噪比相当而E5信号的最小,并且仰角越低信号间信噪比差距越大;当仰角高于60度且在同一仰角时E1、E5a、E5b信号的信噪比相当,在50~52 dB-Hz间波动,而E5信号的信噪比要比前三者低3~4 dB-Hz。图中G11卫星的仰角跨度为6~88度,其 L1、L2 信号的信噪比跨度分别为 41~50 dB-Hz、32~48 dB-Hz,在相同仰角时L1信号的信噪比始终高于L2信号并且仰角越低信号间差值越大,仰角在80度附近时信噪比差值在 2 dB-Hz。
从上述分析可以看出在相同仰角时GalileoIOV卫星中E1、E5a信号的信噪比要高于 GPS卫星 L1、L2信号的信噪比,E5b信号的信噪比与L1信号的相当,E5信号的信噪比要高于L2信号,由此可知Galileo IOV卫星的信号总体强度要强于GPS信号。
2.2 多路径误差
卫星信号的多路径效应指的是接收机天线除了接收到从卫星反射后经直线传播到达接收机的信号外还接收到由该直射信号经周围物体反射后的信号,由多路径效应引起的测量误差称为多路径误差。由测量得知载波相位测量值的多路径误差要比伪距测量值的多路径误差低两个数量级,分别为厘米级和米级。随着技术的发展伪距多路径误差已经成为影响定位精度的主要误差源之一,常用的计算多路径误差的双频模型如下[4-5]:

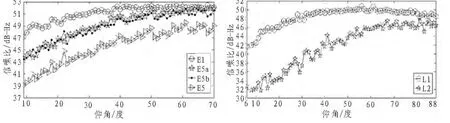
图2 信号的信噪比与仰角的关系(左图:E11,右图:G11)Fig.2 The SNR of E11(Left),G11(Right)
式(1)模型适用于载波相位连续未发生周跳的情况并且之后要减去均值以去除整周模糊度及硬件延迟项[6],由于上述模型只能处理双频数据,对Galileo四频信号的多路径误差而言要计算两次并且数据的利用率不高,下面给出了计算伪距多路径误差的四频模型[7]:

假设接收机连续跟踪未发生周跳,以E1信号多路径误差的计算为例,由式(2)-(3)得:

并将由 3(3)i=1-(3)i=2-(3)i=3-(3)i=4得到的关于 I1的关系式代入到(4)式(另外三路信号多路径误差的计算过程类似)可得:
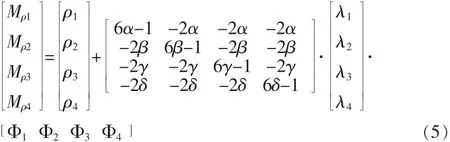
其中 ρi是伪距观测值,Φi为相位观测值,λi为信号的波长,fi是信号的中心载频,Mρi是信号的伪距多路径误差(=1,2,3,4),式(5)中
注意该计算模型适用于载波相位连续未发生周跳的情况并且之后要减去均值以去除整周模糊度及硬件延迟项。
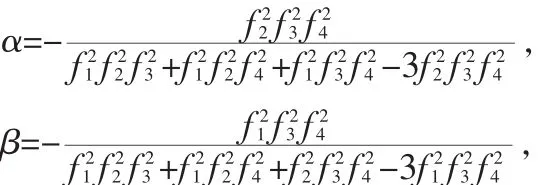
文中分别采用式(5)、(1)计算 E11、G11卫星的多路径误差,此处选取了卫星仰角间隔在35~40度间的连续800个历元的数据(如图3所示),实心曲线表示此段时间内卫星仰角的变化,实心点表示E1信号的多路径误差,‘米’字星表示E5a信号的多路径误差,空心圆表示E5b信号的多路径误差,空心五角星代表E5信号的多路径误差。
图3 多路径误差(左图:E11,右图:G11)Fig.3 Multipath error of E11(Left),G11(Right)
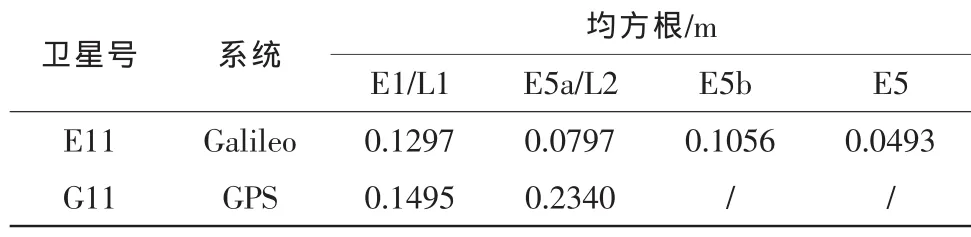
表2 多路径误差统计数据对比Tab.2 Statistical data ofmultipath error
从图3中可以看出E11中E5信号波动较平缓。表2给出了数据对比,E5信号的多路径误差最小,其RMS值(对各历元的多路径误差求取均方根)在0.05米左右,而E1、E5a、E5b信号的多路径误差的RMS值约为E5信号的两倍。G11卫星两路信号的RMS值分别为0.1496米、0.234 2米,比IOV卫星的大,可见在同一仰角范围内IOV卫星的多路径误差小于GPS。
2.3 定位精度
本文选用可视卫星数及PDOP值[8]来评估Galileo/GPS组合系统的定位性能,并用相同条件下GPS系统的定位解算作为对比,此处选取第一天中03:30~05:00(LT:本地时间)间的数据进行分析,卫星截止仰角设置为30度,在此时间跟踪到E11、E12、E19三颗 IOV 卫星。
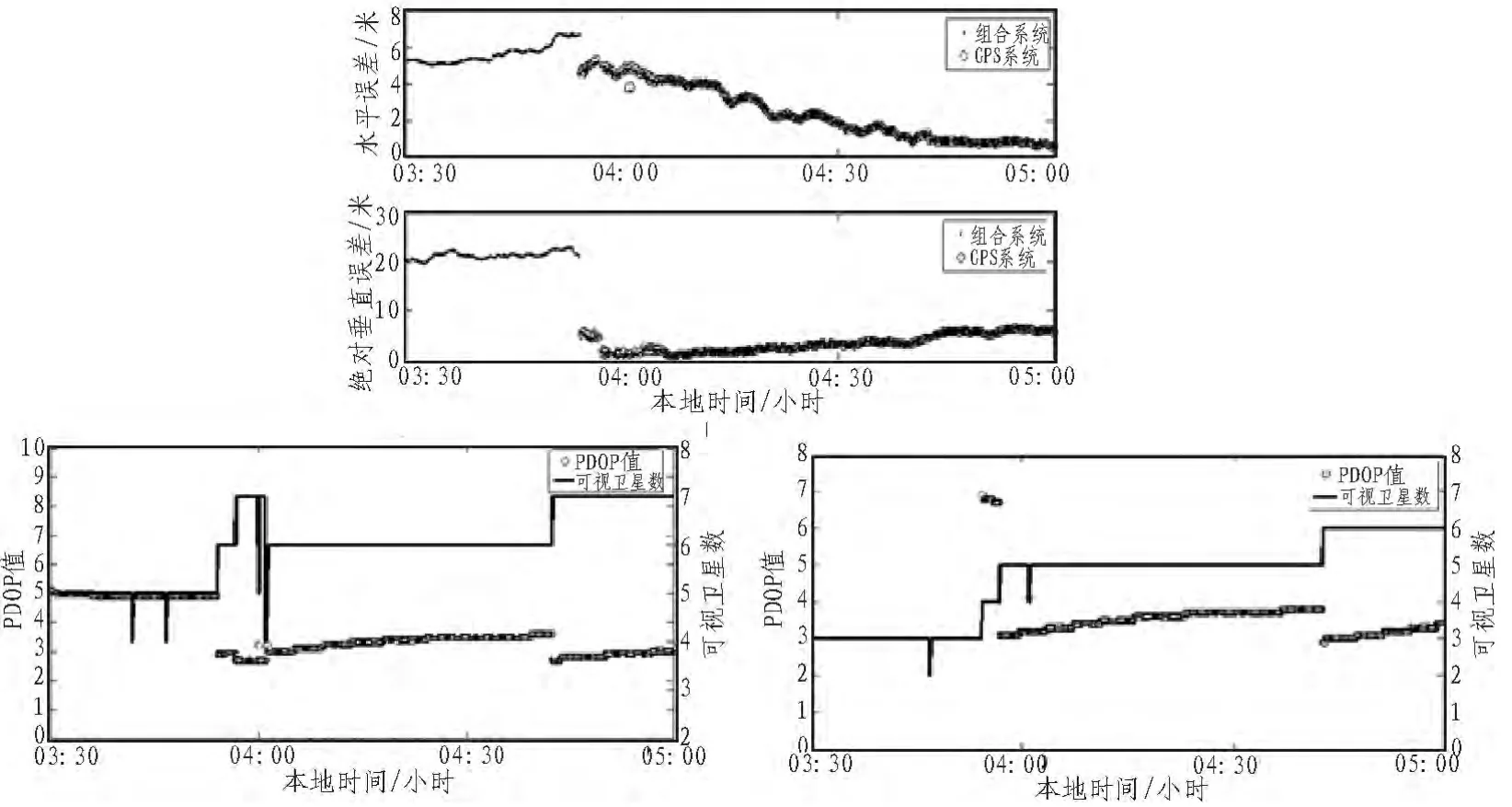
图4 定位精度(上图),PDOP及可视卫星数(左图:组合系统,右图:GPS)Fig.4 Accuracy of Positioning(top),PDOP and NVS(Left:combined,Right:GPS)
图4(上图)中给出了两系统在截止仰角30度下水平方向和垂直方向的定位误差,其中实心点表示Galileo/GPS组合系统,空心圆表示GPS系统。图中在 03:30-03:54(LT)间GPS系统没有进行有效定位解算,为深入的进行分析,图4(左图)、(右图)给出了两系统的可视卫星数及PDOP值,图中空心圆表示PDOP值,实线为可视卫星数。
从图 4(右图)中可以看出 03:30~03:54(LT)间只有三颗GPS卫星,以致图4(上图)中GPS系统没能进行有效定位解算,而组合系统在此时间段中由于E11、E19卫星的加入,使可视卫星数达到了五颗从而进行了有效定位解算。
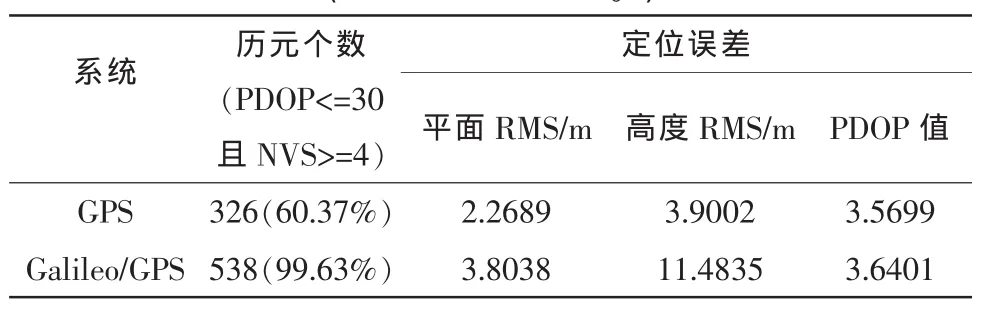
表3 定位解算统计数据对比(截止仰角30度)Tab.3 Statistical data of positioning accuracy(Elevation M ask 30。 )
表3给出了定位结算统计数据对比,Galileo卫星的加入使有效定位解算历元数从60.37%提高到99.63%,但由于03:30-03:54(LT)间组合系统的可视卫星数仅为五颗左右使此段时间的定位误差及PDOP值都较大,并增大了组合系统在整段时间内定位误差的RMS值 (用各历元的定位结果减去基准值,然后取均方根)和PDOP均值,而GPS系统在此段时间由于可视卫星数不足四颗没有进行有效定位解算使表3中的统计数据不含这段时间,因此定位误差及PDOP值比组合系统的小。从图4(右图)可以看出03:54-05:00间GPS系统的可视卫星数多于四颗,对应此段时间的PDOP值在4左右,而Galileo/GPS组合系统由于GalileoIOV卫星的加入增加了可视卫星数并改善了几何分布,使组合系统的PDOP值小于4。
3 结束语
GalileoIOV卫星信号的信噪比随着仰角的增大而增大,并且卫星信号的总体强度要强于GPS卫星的信号。利用文中提出的处理四频信号的多路径误差的计算模型可以看出在同一仰角范围时E5信号的多路径误差远小于E1、E5a、E5b信号的多路径误差,并且Galileo IOV卫星信号的多路径误差要小于G11卫星信号的误差。在单点定位精度方面,同GPS系统相比Galileo卫星的加入增加了Galileo/GPS组合系统的可视卫星数,并改善了其几何分布,提高了定位精度。
[1]AmbrosiniM.Galileo Constellation Operations,Training and Simulations[J].2013.
[2]Hackel S,Steigenberger P,Hugentobler U,etal.Galileo orbit determination using combined GNSS and SLR observations[J].GPSSolutions,2013:1-11.
[3]Axelrad P,Comp C J,MacDoran P F.SNR-based multipath error correction for GPS differential phase [J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(2):650-660.
[4]Wu X L,Zhou JH,Wang G,et al.Multipath error detection and correction for GEO/IGSO satellites[J].Science China Physics, Mechanicsand Astronomy,2012,55(7):1297-1306.
[5]Teunissen P JG.GPS for Geodesy[M].Berlin:Springer,1998.
[6]Linyuan X,Jingnan L,Songbo Z,et al.Analysis on code multipath mitigation by phase-Aided smoothing[J].Geospatial Information Science,1999,2(1):73-77.
[7]Zhang Y,Liu Y,Hong Z,et al.Evaluation of Positioning Performance using the GPS+QZSS in Shanghai[J].Transactions of the Japan Society for Aeronautical and Space Sciences, 2014, 57(1):1-8.
[8]吴甜甜,张云,刘永明,等.北斗/GPS组合定位方法[J].遥感学报,2014(5):12.WU Tian-tian,ZHANG Yun,LIU Yong-ming,et al.BeiDou/GPS combination positioning methodology [J].Journal of Remote Sensing,2014(5):12.