一种油水混匀装置的研制
2015-01-27刘广银任素萍武灵杰
刘广银,任素萍,刘 帆,李 波,武灵杰
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
0 引言
石油作为一种常规能源和化工基础原料,在我国的国民经济中占有重要地位。随着石油开采量的增加,油田化学研究也得到很大的发展,其中原油脱水是原油开采中必须进行的环节。原油破乳剂是快速高效去除原油中水分的最有效办法。针对我国目前原油破乳的使用和研究现状,以及越来越严格的环保要求,对新型高效的破乳剂的研究和应用显得日益紧迫。
在破乳剂的研究中,需要混匀原油和破乳剂。本文研制了一种用于稠油降黏实验中混匀破乳剂和原油的装置,提高混匀效率,缩短脱水时间,降低人力成本,并且能够广泛地应用于实验室中各类液液混匀实验。
1 组成结构及工作原理
该机构由一组凸轮摇臂、连接摇臂、主动齿轮和动齿轮构成,基于此结构,研制了一种反复摇匀试管的实验装置。装置由可编程微处理器控制,通过键盘显示电路设定参数,经直流电机驱动器放大输出信号,电机带动往复运动机构,实现试管的振荡。同时采用光电编码器采集试管的转动位置,反馈到控制器,进而适时控制电磁阀对试管中的废气周期性排出。实验装置如图1 所示。
1.1 往复摆机构设计
为了实现试管的摆动,并且使电机的控制简单化,采取在保持电机转向不变的情况下周期性改变力矩转向的往复摆机构,结构如图2所示。从动齿轮、主动齿轮和电机,连杆两个节点均为活动链接。电机带动连杆转动时,主动齿轮会在连杆的束缚下在一定角度范围内往复运动,从而带动从动齿轮往复运动。从动齿轮带动中心主轴反复运动,即可实现试管的往复摆。经过实验验证,该结构稳定且输出力矩大,能够带动较重的试管。

图1 油水混匀装置结构图Fig.1 Oil and water mixing device

图2 机械结构Fig.2 Mechanical structure
光电编码器通过连接齿轮与定位齿轮啮合,从而获得中心主轴的转动位置信息。由于实验过程中存在仅一组实验的情况,也存在同时几组对照实验的可能,因而结构在后期的改进中在同一中心轴上增加了多个试管固定结构。
1.2 部分参数及理论计算
(1)传动比的计算。主动齿轮、从动齿轮参数如表1所示。其传动比:i= Zb/Za=60/100=0.6。
(2)最大摆动角度的计算。主动齿轮转动角度范围为-90°~+90°,转过的齿数为50,故从动齿轮转过50,折合转动角度为360/60×50=300°,完全可以实现试管的振荡要求。

表1 齿轮参数Tab.1Gearparameters
2 控制电路设计
2.1 MCU 的选用
选用MSP430G2553 单片机作为控制器。MSP430系列单片机是美国德州仪器(TI)1996 年开始推向市场的一种16 位超低功耗、具有精简指令集(RISC)的混合信号处理器(Mixed Signal Processor)。具有超低功耗、处理能力强、开发环境方便简捷等优点。
2.2 电机驱动器设计
L298N 是SGS 公司的产品,内部包含4 通道逻辑驱动电路。是一种二相和四相电机的专用驱动器,即内含二个H 桥的高电压大电流双全桥式驱动器,接收标准TTL 逻辑电平信号,可驱动46V、2A 以下的电机。
L298N 有两路电源,分别为逻辑电源和动力电源,图中5V 为逻辑电源,12V 为动力电源。J4 接入逻辑电源,J6 接入动力电源,J1 与J2 分别为单片机控制两个电机的输入端,J3 与J5 分别与两个电极的正负极相连,见图3。
ENA 与ENB 直接接入5V 逻辑电源,即两个电机时刻都工作在使能状态,控制电机的运行状态只有通过J1与J2 两个接口。
2.3 键盘显示电路

图3 L298N 电路图Fig.3 L298N Circuit diagram
采用HD7279 键盘显示电路芯片,该芯片是一片智能显示驱动芯片,具有串行接口,能够驱动8 位共阴式数码管(或64 只独立LED)。该芯片同时还可连接多达64键的键盘矩阵,单片即可完成LED 显示、键盘接口的全部功能。
键盘显示电路中,用一片HD7279 芯片驱动4 位共阴极数码管,供装置相关参数的显示。同时,外接一4×4 的按键模块,用于进行相应参数的设定。
3 控制程序设计
系统的控制流程图如图4 所示。电机PWM 调速[1]:
在对直流电动机电压的控制和驱动中,半导体功率器件(L298)在使用上可以分为两种方式:线性放大驱动方式和开关驱动方式。
半导体功率器件工作在线性放大驱动方式,器件工作在线性区。其优点为控制原理简单,输出波动小,线性好,对邻近电路干扰小。同时也存在功率低和散热问题严重缺点。
而开关驱动方式是使半导体功率器件工作在开关状态,通过脉调制(PWM)来控制电动机的电压,从而实现电动机转速的控制。
当开关管的驱动信号为高电平时,开关管导通,直流电动机电枢绕组两端有电压U。t1秒后,驱动信号变为低电平,开关管截止,电动机电枢两端电压为0。t2秒后,驱动信号重新变为高电平,开关管的动作重复前面的过程。电动机的电枢绕组两端的电压平均值U 为:
U =(t1×U)/(t1+t2)=( t1×U)/T=D×U
式中:D—占空比(D= t/T)。占空比D 表示了在一个周期T 里开关管导通的时间与周期的比值。D 的变化范围为0≤D≤1。当电源电压U 不变的情况下,输出电压的平均值U 取决于占空比D 的大小,改变D 值也就改变了输出电压的平均值,从而达到控制电动机转速的目的,即实现PWM 调速。
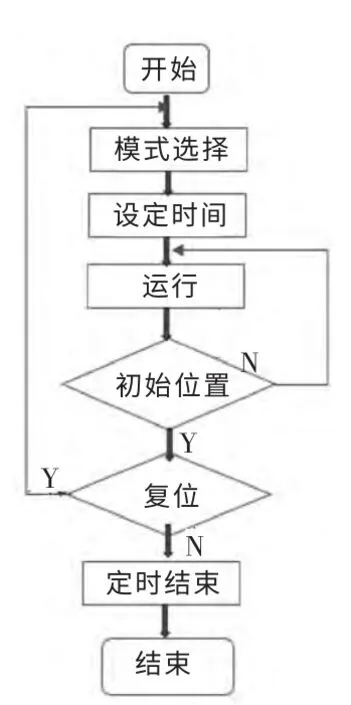
图4 流程图Fig.4 Flow chart
在PWM 调速时,占空比D 是一个重要参数。改变占空比的方法有定宽调频法、调宽调频法和定频调宽法等。常用的定频调宽法,同时改变t1和t2,但周期T(或频率)保持不变。
4 总结
该控制系统简单高效,能够实现油水混匀的自动化进行,具有很高的实用价值。
[1]王兆安,黄俊.电力电子技术[M].4 版.北京:机械工业出版社,2000.
[2]赵正宏,许绛垣,刘孝,等.工业安全管理的实用事故模型及剖析[J].劳动保护科学技术,1999,3.
[3]张胜强.我国煤矿事故致因理论及预防对策研究[D].杭州:浙江大学,2004.
