仿人机器人步行运动学建模与仿真
2015-10-26马飞赵建伟朱斌孙志坤贾瑞清
马飞,赵建伟,朱斌,孙志坤,贾瑞清
(中国矿业大学(北京),北京 100083)
仿人机器人步行运动学建模与仿真
马飞,赵建伟,朱斌,孙志坤,贾瑞清
(中国矿业大学(北京),北京100083)
为研究仿人机器人步行、跑动和跳跃等技术问题,并实现仿人机器人在复杂非结构的人类生活环境中的应用。建立了刚柔耦合的仿人机器人系统;用D-H坐标变换法建立数学模型并得出正逆运动学公式及其解析解;规划出机器人稳定无冲击的行走步态,将Solidworks实体模型导入虚拟样机Adams中进行运动仿真,仿真结果与规划步态基本一致,验证了所建立的数学模型和实体模型的正确性,为仿人机器人动力学分析和步态优化提供了研究平台。
仿人机器人;数学模型;运动仿真;SolidWorks;Adams
0 引言
仿人机器人是一种模仿人类的机器人,典型特点是机器人的上下肢通过运动副连接,模仿人类的腿及髋关节、膝关节和踝关节,以执行机构代替肌肉,实现对身体的支撑和连续协调的运动。仿人机器人具有和人类相似的外形,具有很大的灵活性,更适合在人类生活、工作的环境与人类协同工作[1]。步行能力是仿人机器人最基本也是最重要的能力,本文针对本课题组设计的一款仿人机器人,建立其下肢的数学模型,求解其逆运动学公式;规划本机器人完整的行走步态,并导入完整的Adams仿真模型,将该步态在虚拟样机里实现,以验证数学模型和仿真模型的正确性。
1 数学模型建立
仿人机器人下肢部分是关乎其行走的关键机构,本仿人机器人下肢具有10个自由度,其中2×3=6个控制前向运动,2×2=4个控制侧向运动为描述杆件之间的相对位置关系,采用D-H矩阵表示法建立连杆坐标系[2]。因仿人机器人自由度数较多和不存在固定基座等问题,提出一种新思路,将参考坐标系W建立在机器人两髋关节中心连线的中点在地面的投影点上,在行走过程中此投影点随着机器人向前运动,参考坐标系也随之往前运动,即相当于有一个虚构的杆件在“支撑”着机器人,这样求解左右脚运动就是相对独立的,避免了因左右脚交替支撑地面(甚至在跑步时双脚都腾空)而引起的求解需划分区间和求解复杂的问题,并且在求解左右脚运动时各自的求解误差不会相互积累,提高了运动精度。
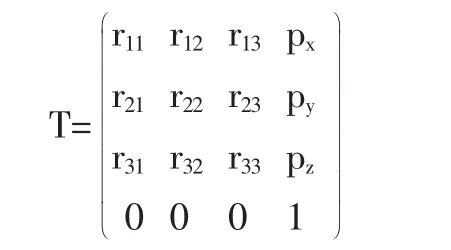
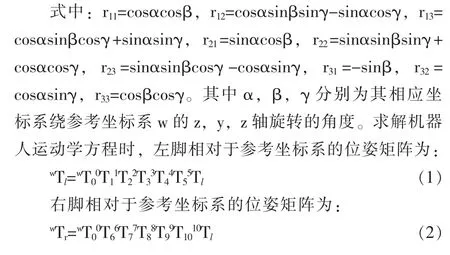
将机器人躯干定义为杆l0,机器人右腿依次往下定义为杆l1~l5,相应的关节定义为关节1~5;左腿依次往下定义为杆相应的关节定义为关节6~10。杆件坐标系分别建立在相应的关节上,并与其对应的上方一杆件上固连,左右脚上建立坐标系根据建立的坐标系和杆件参数,确定相邻坐标系的变换矩阵四个D-H参数中只有θi为变量(θi为xi转向的角度,与zi轴呈右手定则时为正)。躯干坐标系O0相对于参考坐标系W的转换矩阵wT0和左右脚相对于参考坐标系的转换矩阵wTl和wTr均可用矩阵T来表示[3]:
2 运动学求解
数学模型建立后,对机器人进行运动学求解,得到其正逆运动学公式。
2.1正运动学求解
上节得到了躯干相对于参考坐标系的位姿矩阵、左脚相对于参考坐标系的位姿矩阵和右脚相对于参考坐标系的位姿矩阵在杆件参数和各个关节转角已知的情况下,就可以得到躯干、左脚和右脚的位姿。
2.2逆运动学求解
对机器人进行步态规划,首先建立机器人的运动学方程,再引入约束条件,最后求解得到机器人各个关节的运动轨迹。最关键的问题是机器人的逆运动求解。双足机器人的逆运动学问题可以描述为给定腰部和脚的期望位姿,求解使机器人满足此位姿的各关节转角问题。对于这个问题可能多解、唯一解和无解。为使求解比较简单,对机器人添加三个约束[4]:
约束一:在运动过程中,机器人上半身总是相对于地面保持竖直的。
约束二:在运动过程中,机器人两脚掌与地面总是平行的。
约束三:手臂在静态步行中对运动的影响性较小,不考虑手臂的影响。
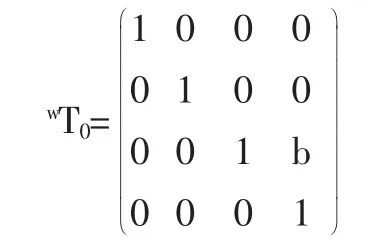
在这三个约束下,在躯干坐标系O0相对于参考坐标系W的转换矩阵wT0中,各个量为:则矩阵可表示为:

将上述矩阵带入式(1)、(2),得到逆运动学求解的等式。在逆运动学求解过程中px,py,pz和b可以看做已知量,用以求取各个关节的旋转角度。因为左右腿的求解过程相似,这里只列出右脚各个关节的求解过程:
(1)在式(2)的两端同时左乘以wT0的逆阵(wT0)-1:
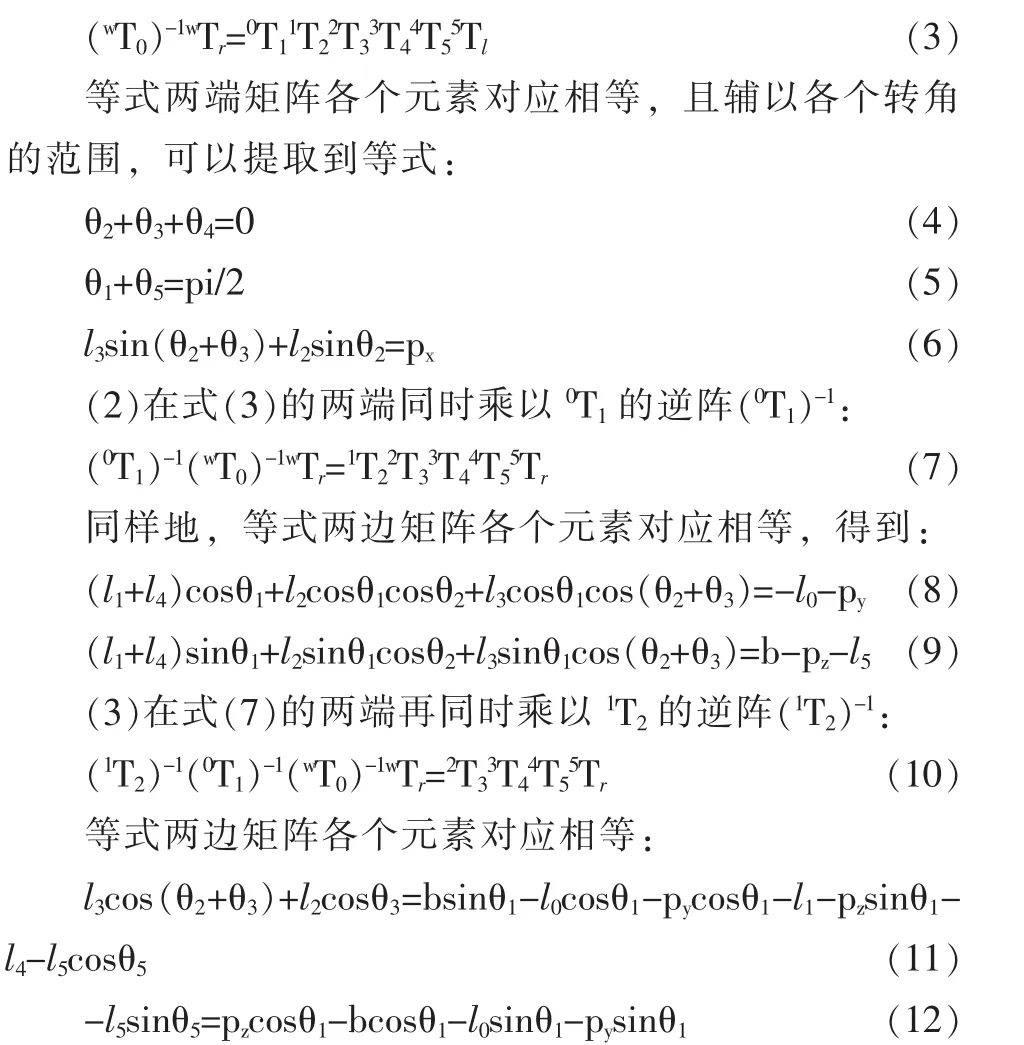
那么,由式(4)~式(6),式(11),式(12)组成方程组,px,py,pz和b可以看做已知量,可以求得各个θ角度的值,在考虑了各个角度因结构而限定的实际范围后,得到各个角度的表达式。
3 步态规划
仿人机器人的步态行走分为静态行走和动态行走。规划机器人处于低速静态步行,惯性力可忽略,因此采用静态稳定性判据——重心投影法,即保证在行走过程中机器人重心始终落在脚掌与地面形成的支撑区域内[5]。
重心在地面的投影必须落在机器人的支撑脚与地面的接触范围之内,设计重心的轨迹为正弦曲线,如图1所示,这样避免重心出现突然的转变,引起机器人行走不稳定。

图1 重心轨迹规划图Fig.1 The center of gravity of trajectory planning
机器人通过双腿蹬地实现运动,为了减小地面对脚的冲击力,规划非支撑脚的侧向运动也为正弦运动,抬脚高度最大为5mm,这样机器人脚部在最高处速度达到最大,在离地和落地瞬间的速度最小,可以有效的减小冲击。规划曲线如图2所示。

图2 脚步运动轨迹Fig.2 Moving track
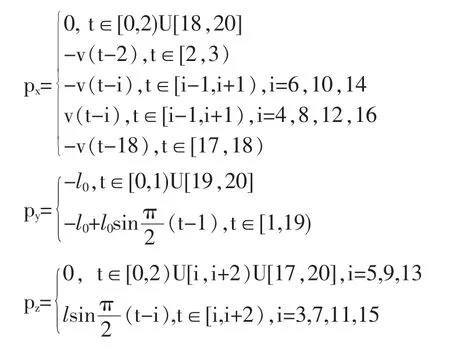
图2设定机器人行走速度为v=30mm/s,则规划机器人行走中2s前进一步,行走过程中重心下降l=5mm,则各个时间段的机器人步态如表1所示。

表1 各个时间段机器人步态Tab.1 The robot gait of each time
根据图1,图2,表1规划的信息编写左右脚相对于参考坐标系的转换矩阵中的px,py,pz和b的运动函数式,因本参考矩阵的设置是随机器人一起移动的,故px,py,pz和b的运动式相对较简单,仅列出右脚在20秒内的起步、步行、停止的规划公式:

在规划得到了左右各个脚的px,py,pz和b的运动曲线后,带入到各个角度的表达式里,在Matlab里计算并绘出各个旋转角θ的曲线,仅画出右脚各个关节运动曲线,如图3所示。

图3 右脚各个关节旋转角运动曲线Fig.3 Motion curve of each joint angle
4 虚拟样机仿真
根据设计要求在SolidWorks里建立了实体三维模型,将建好的模型保存为parasolid(*.x_t)格式的文件后,便可在Adams中直接导入(Import)[6],导入后,在Adams下对三维模型的各个零件重新进行名称、材料、密度和惯性特性等基本信息的录入,再根据运动形式添加了约束(Joint)和驱动(Motion),并根据实际情况再机器人脚底板和地面间添加了接触力。
将在Matlab里得到的左右脚各个关节运动曲线离散化,用dlmwrite()函数将数据导出为文本文件(*.txt)。在Adams中根据这些离散的数据(Data Element)生成样条曲线(Spline)[7],通过Cubic Fitting Method指定到相应的关节驱动(Motion)中去。这样,机器人各个关节就能够按照规划的轨迹运动[8]。
使用Adams/simulink进行仿真,仿真结束后,启动ADAMS/Postprocessor模块,利用仿真结果后处理,得到相关的数据曲线。得到机器人躯干的侧向运动的轨迹如图4所示。

图4 机器人躯干侧向运动轨迹Fig.4 Lateral moving track of robot body
由仿真轨迹可见,机器人前进了480mm,侧向误差只有10mm左右,相对误差仅为2.03%,仿真运动轨迹基本与规划的曲线相吻合,证明了模型的正确性。
5 结论
步行是仿人机器人最基本的能力,也是研究的重点之一,将参考坐标系建立在双腿髋关节连线的中点在地面的投影上,简化了机器人的数学模型,使在求解机器人四肢的运动时,不会相互影响,其运动学和动力学方程也更为简单,方便了机器人运动学和动力学分析和优化。
规划了运动曲线,Adams仿真可以直观了解仿人机器人的行走步态,获得机器人行走的运动学、动力学参数,为进一步研究步态优化和稳定性提供了基础。运用matlab和虚拟样机Adams进行联合仿真成为了研究机器人运动的有力手段。仿真轨迹与规划的曲线基本吻合验证了机器人模型建立的正确性,也为更深层次仿人机器人运动学和动力学研究提供了基础与平台。
[1]ZHANG Zhou,HUANG Qiang,LI Guang-ri.Kinematic Ana-lysis and motion planning of a Humanoid Leg with7 DOF and Double Spherical Hip Jiont[J].ROBOT,2007,6.
[2]Cui Yu-jie,SHI Pu,HUANG Qiang.Kinematics analysis and simulation of a 6-DOF humanoid robot manipulator[C].IEEE Computer Society,2010.
[3]Yang Dong-chao,LUI li,XU Kai.etc.Kinematics anal-ysis of humanoid robot[J].Chinese Journal of Mechanical Engineering,2003,9.
[4]LIAO Shao-hui.Biped Robot Geometry Modeling and Motion Planning study[D].Dalian Jiaotong Univer-sity,2007.
[5]Mitobe K,Sotah M,Capi G.A ZMP control of a power-ed passive dynamic walking robot[C].Piscataway,NJ,USA:IEEE,2010.
[6]Pengjun M,Zhang Fu,Zhang Guo-ying.Data exchange method between ADAMS,CATIA and SolidWorks software[J].Applied Mechanics and Materials,2011,1.
[7]Tlalolini David,Aoustin Yannick and Chevallereau,Christine:Modeling and optimal trajectory planning of a biped robot using newtoneuler formulation[C].INSTICC Press,2007.
[8]DU Zhi-jiang,ZhANG Bo and SUN Li-ning.Research on motion simulation of biped walking robot based on virtual prototype technology[J].Journal of System Simulation,2007,19.
[9]刘晋霞,胡仁喜,康士廷,等.Adams2012虚拟样机从入门到精通[M].机械工业出版社,2013.
Kinematic Modeling and Simulation of Humanoid Robot Walking
MA Fei,ZHAO Jian-Wei,ZHU Bin,SUN Zhi-Kun,JIA Rui-Qing
(China University of Mining and Technology(Beijing),Beijing 100083,China)
To research the technical problems of humanoid robot walking,running and jumping and apply humanoid robot in unstructured human life environment.A rigid-flexible coupled humanoid robot system was established;the mathematical model of humanoid robot was established with the D-H homogeneous coordinate transformation and forward and inverse kinematic equation of motions was calculated with analytical solution.After planning the gait of stable and no impact walking,the Solidworks model was imported into virtual prototying Adams for kinematic simulation.The result of simulation being unanimous with gait planning has tested and verified the correctness of mathematical and solid modeling,thus a research of platform for the kinetic analysis and gait optimization of humanoid robot was provided.
humanoid robot;mathematical model;kinematic simulation;Solidworks;Adams
TP24
A
10.3969/j.issn.1002-6673.2015.01.005
1002-6673(2015)01-014-04
2014-09-24
项目来源:中央高校基本科研业务费项目(2011YJ02)
马飞(1990-),男,硕士研究生。研究方向:机器人技术与设备。
