跟踪式光伏设备的阵列排布优化设计
2015-01-23孔月萍代冰辉许启明
孔月萍,张 璋,代冰辉,许启明
(1.西安建筑科技大学信息与控制工程学院,陕西 西安 710055;2. 西安建筑科技大学资源与材料学院,陕西 西安 710055)
光伏电站建设时,光伏设备的排布将决定光伏电站的发电容量、耗材用量及土地占用面积.早期光伏电站的建设选用固定式光伏设备,其设备排布间距的设计方法较为成熟[1-3],排布方案也比较简单.近年来,为提高光伏设备的光能接收效率,跟踪式光伏设备不断涌现并逐渐得到广泛应用,它与固定式设备相比可有效提高发电量10%~45%[4].目前跟踪式光伏设备的排布设计方法极少见诸报道,仅李军[5]沿用固定式设备的排布思路提出了斜单轴跟踪式光伏设备的阵列间距设计方法,但该方法没有对电池面板的全年阴影变化情况进行研究和分析,设计的阵列排布间距过大,浪费土地和建设耗材.
光伏设备阵列式排布时,相邻设备的间距测算主要受三方面因素的影响,一是设备间电池面板的阴影遮挡,二是光伏设备出现故障后的维护通道,三是光伏设备发电过程中的通风散热空间.其中设备间电池面板阴影遮挡是最重要的因素,它会导致大量的产能损失,甚至造成光伏电池的报废[6].经验表明,根据阴影遮挡因素确定的光伏阵列间距通常能够满足通风散热及维护通道所需空间,因此,避免设备间电池面板的阴影遮挡成为光伏阵列间距设计的决定性因素.
跟踪式光伏设备的电池面板跟随太阳转动,若能掌握其阴影在全年内的变化规律,找出电池面板之间不产生阴影遮挡的临界阴影投射位置,就可以确定出最优排布间距.从物体阴影形成的机制出发,运用三维图形变换原理即可构造太阳照射下跟踪式光伏设备电池面板的阴影测算模型.在此基础上借助计算机仿真技术绘制电池面板在全年内的阴影投射位置,总结其阴影变化规律,进而设计设备的阵列排布间距.
1 电池面板的阴影测算模型
如图1所示,阴影的形成至少需要三个因素,光线λ投影面π和物体P.一个物体P只有在光线的照射下,遮挡住了物体背面的另一个物体(投影面π),才会在背面的物体上留下阴影 P'.因此根据这三个因素,可用三维图形变换原理构造出太阳照射下跟踪式光伏设备电池面板的阴影测算模型.
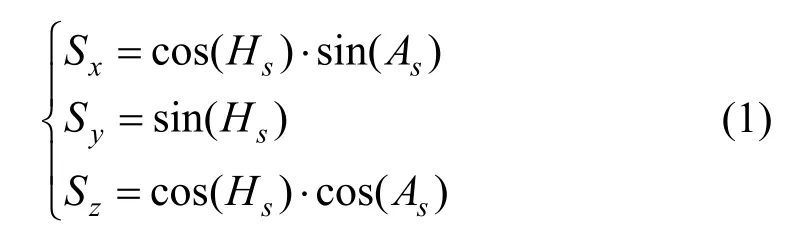
根据天球理论对地平坐标系的描述,太阳的方位由其高度角HS与方位角AS确定,它们的计算方法可参见文献[7-8].将HS和AS转换为矢量形式的方向向量后,便可代入矩阵中进行运算.设太阳的方向向量 S =[SX, SY, SZ]由球面坐标系与直角坐标系的转换关系,得出太阳的方向向量S,再做归一化处理,可得太阳的单位方向向量如式(1).
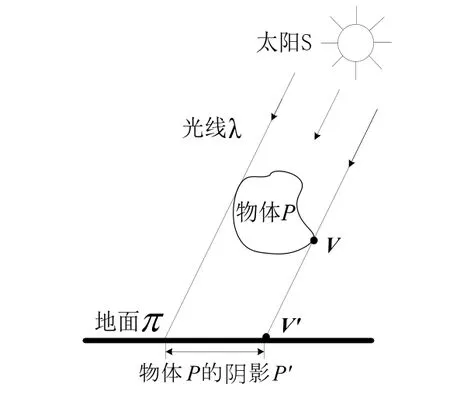
图1 物体阴影的形成Fig.1 The formation of shadow
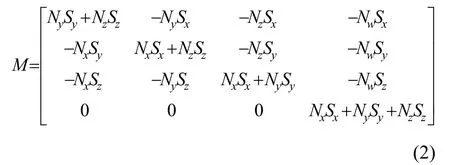
地面π的方程用点法式表示,设为Nxx+Nyy+Nzz+Nw=0,其中 N =[Nx, Ny,Nz]为地面的法向量, Nw为常数项.根据平面投射变换矩阵[10-11],得太阳照射下的阴影变换矩阵如式(2).
此外,跟踪式光伏设备的电池面板绕支架的端点转动,这个变化可以旋转变换来描述.设RX、RY、RZ分别为点绕X、Y、Z轴旋转的变换矩阵[9],则三者的乘积就可表达空间中任意一种旋转的复合变换矩阵,即ZYXRRRR= .
电池面板是由多块矩形的光伏电池组件拼接而成,呈多边形,因此对电池面板上的所有边界角点V做旋转和阴影投射变换,就可得到其跟踪过程中的投影点'
V.接下来,再对各相邻投影点进行直线连接即可绘制出电池面板的阴影投射位置及形状.至此,得太阳照射下跟踪式光伏设备电池面板的阴影测算模型如式(3).

2 电池面板的阴影变化规律
光伏设备的运行过程中,要避免相邻设备电池面板之间的阴影遮挡,这需要掌握电池面板的阴影变化规律,并依此确定光伏设备的阵列式最优排布间距.图2为某斜单轴跟踪式光伏设备的三维模型示例,其中点 HA~ 为电池面板上的8个边界角点,从以下两个角度分析电池面板的阴影变化规律.
(1) 阴影的全天变化规律
任取一天(如2月21日),对设备的电池面板从上午跟踪起始时刻到下午跟踪终止时刻(真太阳时)进行每30分钟一次的阴影投射位置测算和绘制,得到如图3所示的全天阴影变化情况.可以看出,电池面板上午与下午的阴影变化情况是对称的,且东西方向上设备运行的起始和终止时刻阴影最长.
(2) 阴影的全年变化规律
地球本身自转,还绕着太阳公转,因此物体的阴影除了一天内会随着太阳的方位发生变化外,每天同一时刻的阴影也会随着季节的变化发生偏移.因此,结合(1)中的结论,选取每天上午的跟踪起始时刻(如8点)对电池面板8个角点的阴影进行全年投射位置的测算和绘制,其结果如图4所示.
图中, lA~lH分别为电池面板上8个角点的阴影投射轨迹,可以看出,它们都为直线且相互平行,整个电池面板的阴影都夹在边界角点的东西方向上两条最外侧投影轨迹线内.电池面板的阴影在夏至时最短,再经过秋分到冬至时阴影达到最长,随着年份的推移这一规律循环出现.
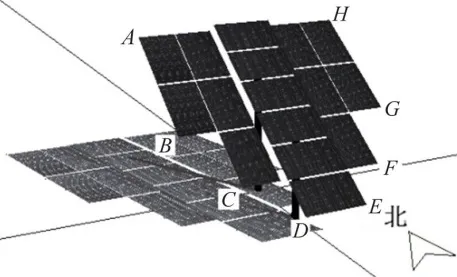
图2 某斜单轴跟踪式设备三维模型Fig.2 3D model of a tracking PV-panel with a inclined single-axis rotating
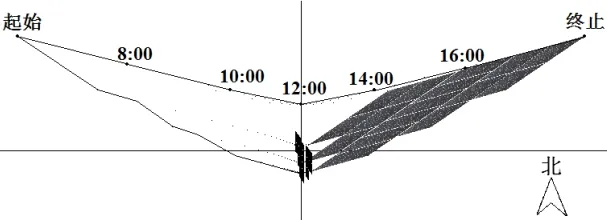
图3 一天内阴影的变化情况Fig.3 Variation of the PV-panel’s shadows throughout a day
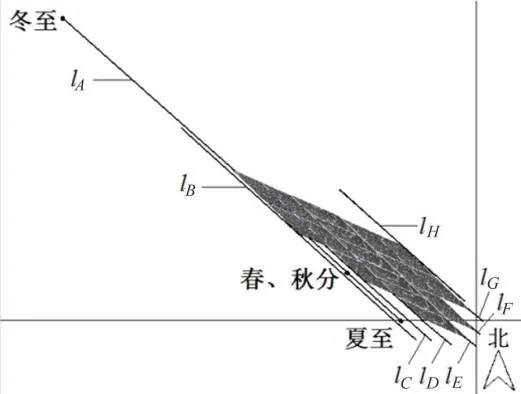
图4 全年8点的阴影变化情况Fig.4 Variation of PV-panel’s shadow at 8:00a.m.throughout a year
3 光伏阵列的排布间距优化设计
如果光伏阵列中相邻设备的电池面板阴影间出现重叠,说明电池面板之间发生了遮挡,被遮挡设备的发电效率会随之下降.若能根据电池面板的阴影变化规律求解电池面板之间不产生阴影遮挡的临界阴影位置,就可测算出相邻设备的最小排布间距.图4中的研究表明,一年中每天跟踪起始时刻电池面板的阴影都夹在边界角点的最外侧投影轨迹线内,因此测算并绘制出边界角点在跟踪起始时刻最外侧的全年阴影轨迹线,就可测算出跟踪式光伏设备的阵列式排布最小间距.
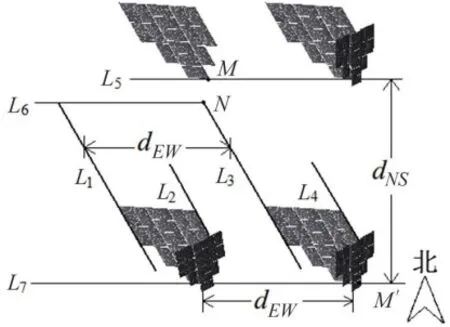
图5 光伏阵列间距计算示意图Fig.5 Calculating the distances of PV-array
如图5所示, L1、L2与L3、L4分别为东西相邻光伏设备的两对最外侧阴影轨迹线,M点和 M'点为设备南北方向上所有边界角点阴影轨迹线的最南端点,N点为最北端点;L5、L6、L7分别为东西方向平行且过点M、N、 M'的直线.显然,东西方向上相邻设备的间距为 dEW,它等价于 L1与 L3(或L2与 L4)之间的东西方向距离,当 L2与 L3重合时dEW最小.南北方向相邻设备间距为 dNS,它等价于L5与L7之间的距离,当L5与L6重合时 dNS最小.
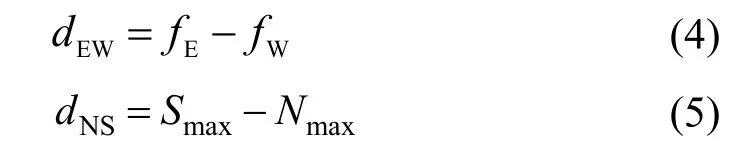
综上,光伏设备的阵列排布间距设计及优化就简化成为单台设备投影轨迹线的测算.设 fE与 fW分别为单台光伏设备电池面板东西方向最外侧的阴影轨迹线方程,其东西向差值 dEW即为东西向相邻设备的最小排布间距(如式(4)).Nmax和 Smax分别为单台光伏设备电池面板上所有边界角点阴影轨迹线最北端点和最南端点所在位置,其差值 dNS即为南北向相邻设备的最小排布间距(如式(5)).
4 仿真实验
为了验证新方法的有效性,对建设在甘肃敦煌(北纬 4 0.1°,东经 9 4. 7°)的跟踪式光伏电站进行了排布间距设计,并与文献[5]提出的方法进行对比.电站建设选用了斜单轴跟踪式光伏设备,其电池面板南北向最大长度为6.214 m,东西向最大长度为5.794 m,支架距地面高度3.728 m,面向正南倾斜°35安装.
设计要求在设备运行的6 h内(真太阳时9~15点)电池面板间无阴影遮挡.采用新方法求得的东西和南北向光伏阵列排布间距分别为8.4m和20.5m,单台设备占地面积为172.2 m2.采用文献[5]方法求得的排布间距分别为24.8m和15.5m,单台设备占地面积为384.4m2.图6为按上述两方法求得排布间距建立的3行3列光伏阵列及其阴影的对比示意图.可以看出在全年阴影最长的冬至日,两种方案下电池面板间均无阴影遮挡,但新方法的占地面积明显减少,可节约土地面积约55.2%.
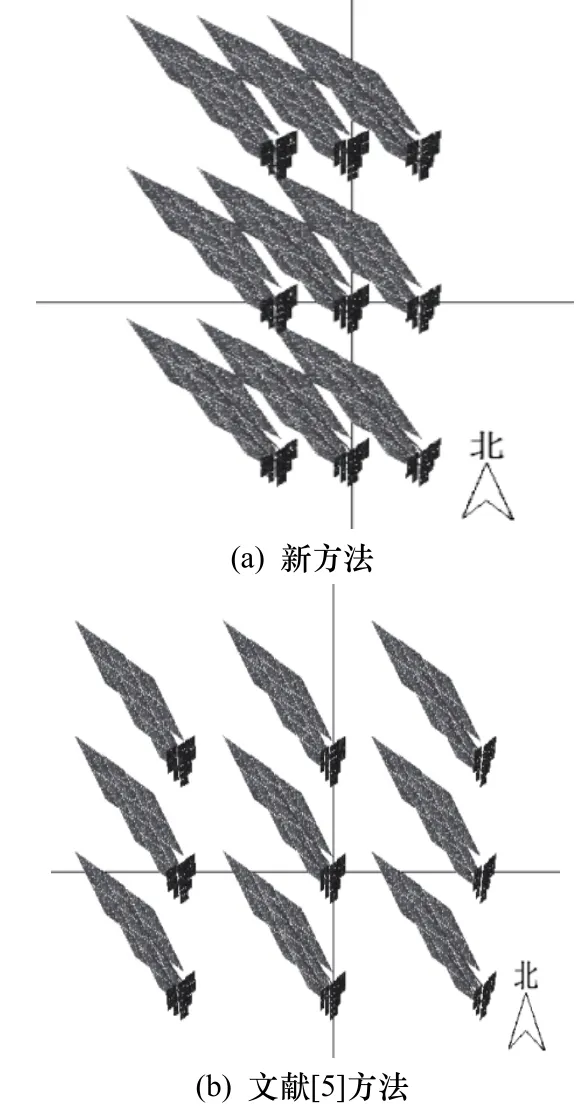
图6 冬至日9时,光伏阵列排布仿真图Fig.6 Simulating configurations at 9:00 a.m. on winter solstice.
5 结束语
针对斜单轴跟踪式光伏设备电池面板构造了太阳照射下的阴影测算模型,分析了跟踪式电池面板的阴影变化规律,提出了光伏设备的阵列式排布间距优化设计模型及方法;能保证在运行时段内相邻光伏设备的电池面板之间无阴影遮挡,且排布间距最小,可有效节省单台光伏设备的土地占用面积,提高装机容量.但该方法仅适用于地势较为平坦的地区,对于地势起伏变化较大的地区,有一定局限性.
Reference
[1] ISHISAKA Y, HARADA K, ISHIHARA Y. Optimization of setting arrays considering the influence of front array's shadow[C].//World Conf. on Photovoltaic Energy Conversion. Waikoloa: IEEE. 1994,(1): 1094-1097.
[2] WEINSTOCK Dan, APPELBAUM. Shadow variation on photovoltaic collectors in a solar field[C].//IEEE Convention of Electrical and Electronics Engineers in Israel,Proceedings. Israel: Institute of Electrical and Electronics Engineers Inc. 2004.
[3] 李杰慧, 刘祖明, 李景天. 固定式独立光伏系统中光伏方阵设计[C].//中国太阳能学会学术年会论文集. 上海:中国太阳能学会, 2003.LI Jiehui,LIU Zuming,LI Jingtian.The design of PV array in fixed stand-alone photovoltaic system[C].//China Solar Energy Society Annual Conference Proceedings. Shanghai: China Solar Energy Society, 2003.
[4] SEFA Ibrahim, DEMIRTAS Mehmet, ÇOLAK Ilhami.Application of one-axis sun tracking system[J]. Energy Conversion and Management. 2009, 11(50): 2709-2718.
[5] 李军.影子计算方法. [EB/OL].http://www.doc88.com/p-69234090133.html.2011-04-16.LI Jun. Shadow calculation method.[EB/OL]. http://www. doc88.com /p-69234090133.html.2011-04-16.
[6] DELINE Chris, DOBOS Aron, JANZOU Steven. A simplified model of uniform shading in large photovoltaic arrays[J]. Solar Energy, 2013, 96: 274-282.
[7] ROBERTO Grena. An algorithm for the computation of the solar position[J]. Solar Energy, 2008, 82(5): 462-470.
[8] KITTLER Richard, DARULA Stanislav. Determination of time and sun position system[J]. Solar Energy, 2013,93: 72-79.
[9] DONALD Hearn M, PAULINE Baker Warren R, CARITHER. 计算机图形学[M]. 3rd ed. 蔡士杰, 宋继强, 蔡敏, 译. 北京:电子工业出版社. 2010.DONALD Hearn M, PAULINE Baker Warren R,CARITHERS. Computer graphics with open-GL[M].3rd ed. CAI Shijie, SONG Jiqiang, CAI Min, translated. Beijing: Electronic Industry Press, 2010.
[10] 王子茹, 黄红武, 周惠成. 一种新的堤坝三维透视模型构建方法及应用研究[J]. 湖南大学学报: 自然科学版.2004, 31(6): 56-59.WANG Ziru, HUANG Hongwu, ZHOU Huicheng. A new method of building three-dimensional perspective model for dams and its application[J]. Journal of Natural Science of Hunan Normal University, 2004, 31(6): 56-59.
[11] 张文辉. 平面阴影算法研究与实现[J]. 计算机应用.2007, 20(6): 1472-1474.ZHANG Wenhui. Improvement of real-time planar shadow algorithm and its implementation[J]. Journal of Computer Applications. 2004, 31(6): 56-59.
