进口地铁车辆牵引系统国产化研究
2015-01-22霍苗苗
王 昊,霍苗苗,李 熙
(北京市地铁运营有限公司地铁运营技术研发中心,北京102208)
0 引言
在城市轨道交通发展初期,轨道车辆的关键系统采用进口引进的方式,随着这批车辆陆续进入厂修周期,其进口部件的维护成本、维护周期成为一个亟待解决的问题[1]。北京地铁13 号线车辆牵引系统采用日本日立技术,自2003年运营已达11年之久,使用寿命达到期限,面临着高成本的厂修及后期维护压力;北京地铁运营有限公司针对这一难题,对13 号线车辆进口子系统进行国产化研究,其中国产化牵引系统实现了与原车进口系统的无缝替换。该研究的成功不仅解决了进口系统维护成本高、维护周期长的问题,同时也为国内进口地铁车辆关键部件国产化提供了借鉴作用。
本研究基于仿真计算,预期达到车辆牵引性能要求,并通过现场试验结果对仿真计算进行验证。
1 牵引系统动力性能计算
13 号线车辆采用3M3T 六辆车编组方式,即:Mc·TM·T-T·Mc。供电电压:DC750 V(DC500 V~900 V),采用第三轨受流;车辆自重:拖车29 t,动车35 t,带司机室动车36 t;定员载荷(AW2)列车重量为280 t,超员载荷(AW3)列车重量为303 t。车辆的基本牵引性能要求如下:
最高运行速度:80 km/h;
平均旅行速度不低于:39 km/h(平均站停时间30 s)。
在超员情况下,在平直线路上,车轮半磨耗状态,额定电压750 V 时,平均加速度为:
列车从0 加速到40 km/h 不小于0.83 m/s2;
列车从0 加速到80 km/h 不小于0.5 m/s2。
国产化牵引系统需要满足车辆动力性能、故障运行/救援能力及实现预期的旅行速度等,根据列车的牵引性能要求进行不同载荷下的牵引计算[2-3],由牵引计算结果进行牵引系统电器参数的计算与选型,车辆的牵引/电制动特性曲线如图1(a)、1(b)所示。

图1 牵引/电制动特性曲线
在AW3 载荷、半磨耗轮径、平直线路、额定3 轨电压750 V 条件下,列车最大启动轮缘牵引力Fs=298 kN,其中恒牵引力速度范围0~37 km/h,恒功率速度范围37 km/h~43 km/h,自然特性速度范围50 km/h~80 km/h。在齿轮比参数与原车参数7.69 保持一致的情况下,单台电机的最大扭矩约为1 333 Nm,最高转速为4 055 r/min,电机的最大功率为272 kW,电机的峰值电流有效值为370 A,网线峰值电流1 600 A。在半磨耗轮径及制动额定三轨电压825 V 的条件下,列车最大电气轮缘制动力为252 kN,其中自然特性范围80 km/h~60 km/h,恒电制动力速度范围60 km/h~5 km/h,电制动力起始减小速度点为5 km/h(可调);电台电机输出最大扭矩为-1 077 Nm,最大电制动功率为343 kW,电机的峰值电流有效值为340 A,网线峰值电流1 500 A。
列车在AW3 载荷且丧失1/3 的动力情况下,提供最大牵引力F 为199.2 kN,在坡度为24‰的坡道上起动,需克服列车的启动阻力和坡道阻力,加速度计算结果为:a=0.36 m/s2;一列空载(AW0)列车牵引一列失去动力且处于超员(AW3)状态下的列车上坡,列车提供最大牵引力F 为198 kN,共需克服两车的启动阻力与坡道阻力,此时加速度a=0.115 m/s2,国产化牵引系统性能的计算结果能够满足列车的故障运行及救援。
2 硬件结构设计与参数计算
原车牵引系统为逆变器—异步电机交流传动系统,在每个动车上各配备一套,动车间的高压母线由母线高速断路器连接,系统主要包括高压电器箱、逆变器、4 台电机及其传动装置[4-5]。国产化牵引系统为了保证能够与原型系统完全兼容,整体部件结构设计与原车保持一致,主电路原理图如图2所示。

图2 国产化牵引系统主电路原理
每个牵引单元的主电路主要部件包括隔离开关箱、熔断器箱、高速断路器箱、断路器箱、滤波电抗器、牵引逆变器、制动电阻、牵引电机、齿轮箱等,牵引逆变器包含两台逆变功率模块和牵引控制单元,每台逆变功率模块驱动两台牵引电机。其中电器部件隔离开关、熔断器、高速断路器、接触器主要用于主电路的隔离以及机械连锁放电、主电路的短路及故障保护、线路短接等。逆变功率模块集成了三相逆变桥臂和制动斩波桥臂,还包括支撑电容和IGBT 门极驱动单元,采用低感母排进行电容与IGBT 的连接,无吸收电路,电路简洁、可靠,另外散热方式为自然冷却,采用以水为冷却介质的热管散热器,对环境无污染、无噪声。支撑电容与前级滤波电抗器组成了LC 滤波回路,由于地铁运行工况较多,母线电流变化较大,电抗器设计采用空心结构,其感值几乎不受直流侧电流的影响。牵引电机采用国产化鼠笼异步电机,转子为铜排鼠笼结构,导条采用高强度的铜合金材料;定子为无机壳结构,冷却方式为带内风扇自通风。各高压电器的选型和主要参数则需考虑高压电气性能、可靠性、所承受的供电网的电压,并根据牵引计算数据进行计算,其参数选型计算如下:
根据车辆牵引计算结果母线的峰值电流为1 600 A,计算车辆每站的停站时间及运行时间,选择隔离开关的额定电流为1 000 A,熔断器的额定电流为1 600 A,高速断路器额定电流为1 000 A,脱扣电流的选择需考虑系统的过流保护顺序,分为3 级:牵引控制单元软件逻辑保护、高速断路器脱扣保护、熔断器熔断保护,因此高速断路器的脱扣电流要介于软件保护电流值与熔断器烧断电流值之间,确定为2 200 A。LC 滤波电路参数选取需考虑电流纹波系数及谐振频率[6],确定L=6 mH,C=13 mF;牵引系统的最大制动功率为343 ×2 ×0.95=650 kW,计算制动电阻阻值为:

考虑一定的裕量,制动电阻取值为1.1 Ω。各电器主要参数如表1所示。
牵引系统硬件设计过程中,结合车辆运行出现的问题及经验,在不影响兼容性的前提下进行优化设计:

表1 电器主要参数
(1)高压电器箱采用轻化玻璃钢材质,满足IP65防护等级,但是高速断路器在脱扣动作时,产生电弧,使箱体内压力增大,因此本研究在HB 箱体前门板设计时,采用百叶窗结构;
(2)功率模块集成了逆变单元和斩波放电单元,取消了制动斩波箱,考虑到车辆配重与车体走线,在原车相应的位置配备了制动电阻接线箱;
(3)国产化制动电阻电阻带厚度由2 mm 缩小为0.69 mm,电阻带方向平行于车辆行走方向,有利于空气对流散热;并且制动电阻采用二次绝缘结构。
3 牵引控制系统设计
国产化牵引控制系统由牵引TCU 控制器及其外围传感器电路组成,实现列车牵引顺序控制逻辑、牵引/电制动特性控制和牵引系统故障保护等。TCU 控制器采用双DSP +PFGA 的架构,与牵引系统主电路结构相对应,PFGA 负责信号采集、脉冲输出、快速故障保护等,两片DSP 分别控制两台PU 模块,负责完成IGBT 逆变器及牵引电机的实时控制、粘着控制、制动斩波控制等,TCU 工作逻辑如图3所示。
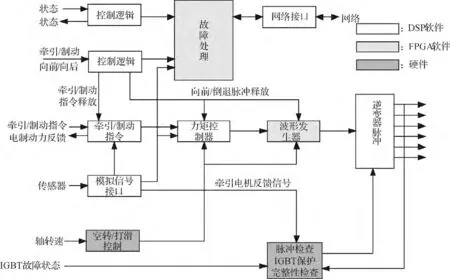
图3 TCU 工作逻辑
牵引控制系统的设计依据安全、可靠、先进的原则进行,操作功能方面包括原车既有功能:前/后牵引、电制动、高加速、坡道启动等,并结合车辆实际运行的经验进行控制优化,其软件结构分为以下几个部分:
(1)信号采集模块。该模块功能为采集用于控制和保护的电压、电流、电机转速、和功率模块温度信号,并进行滤波和转换处理。具有硬件电路自诊断功能,在上电开始,控制器先进行模拟信号电路的硬件自诊断。
(2)故障处理模块。牵引系统故障保护采用分级处理机制,分为3 级:故障A:自动恢复型故障;故障B:连续发生3 次转为永久性故障;故障C:永久性故障。并且具有PFGA 和DSP 两层保护,FPGA 为快速型保护,保护时间为μs 级,主要保护过流与过压故障,DSP 为一般型保护,保护时间为ms 级。
(3)逻辑控制模块。DSP 的软件结构分为逻辑控制模块+电机牵引算法模块两大部分[7],逻辑控制模块负责车辆司机控制器、指令开关的判断处理以及母线接触器控制、主断路器控制、充电接触器控制、主接触器控制、制动接口的控制等。
(4)矢量算法模块。逆变器控制采用矢量控制方法进行转矩和磁通的解耦控制,使得系统动态性能近似于直流电机的调速性能。这种控制方法转矩响应好,控制精度高,保证单轨车运行时系统响应快速、运行平稳、旅客舒适度高,该模块属于电机牵引算法模块中的一部分。
(5)防滑防空转模块。13 号线车辆线路条件较为恶劣,大部分线路为露天铺设,在阴雨天气粘着系数严重下降,空转、滑行现象频繁出现,国产化系统着重优化了该功能,在硬件配置方面,主电路的每个逆变单元分别驱动同一车辆不同转向架的1、3 位和2、4 位2 台并联的异步牵引电动机,以充分利用牵引/电制动运行时的轴重转移补偿,保证最佳的粘着利用;在软件控制方面,采用蠕滑和加速度判断相结合的方法进行电制动力矩的控制。在牵引工况下,随着粘着系数的下降,动轮与拖轮的相对转速差逐步增大,将会触发蠕滑控制,防止粘着的进一步下降,避免空转发生,即使发生空转,利用加速度检测的方法再进行空转控制。
(6)无电区控制模块。北京地铁采用三轨供电,受流复杂,线路上存在多处无电区,车辆在牵引或电制动工况下经过无电区时,容易产生过压、过流故障,容易造成电器设备的损坏。国产化控制系统加入网压瞬断功能,通过检测网压斜率进行网压瞬断保护,快速关断脉冲、断开接触器,使牵引系统电器设备与三轨隔离。
(7)制动电阻控制模块。车辆电制动能量吸收为车载制动电阻吸收方式,在电制动过程中,制动电阻过温发生保护后,三轨电压被抬升触发过压保护,电制动力突然切除,造成列车严重的冲动。国产化牵引控制系统采用精确的制动电阻温度估算模型,检测到制动电阻的温度超过阈值450 ℃时,电制动力进行衰减,然后制动电阻再进行切除保护,不但避免了过压故障的产生,而且消除冲动现象。制动电阻估算模型为[8]:

式中:δ—放电调制系数;Δt—开关周期;t—工作周期,s。
4 试验结果分析
为保证国产化牵引系统与原车牵引系统的一致性及兼容性,本研究对换装国产化牵引系统的车辆进行了试验。牵引4 级从零速至80 km/h 的试验波形如图4、图5所示,其中图4 为电机U 相电流母线电流Idc_means、母线电压Udc_fil、牵引档位MLC 的波形,功率模块开关频率由异步调制到同步调制最后转为单脉冲控制,图5 为励磁电流M-Id、转矩电流Iq及车辆速度Vspeed波形,当车速达到80 km/h 时,转矩电流开始下降已到达限速的目的。国产化车辆进行了动态的轻载、重载试验,试验结果表明,国产化牵引系统具有良好的动态性能。

图4 电机电流、母线电压、母线电流、档位波形

图5 励磁电流、转矩电流、列车速度波形
5 结束语
牵引系统在国产化设计过程中,不仅要根据车辆动力性能要求进行系统的结构设计及参数计算,而且还要考虑车辆的实际情况,在硬件结构及软件设计方面进行量身定制,以保证国产化系统在换装及应用过程中满足车辆的要求,为实现系统的无缝替换,需遵循以下原则:
(1)牵引控制功能保持与原车一致,以避免改变原车的操作、使用习惯;
(2)机械接口及其电气接口要与原车系统兼容,以避免车体结构及转向架进行更改;
(3)系统动力性能在充分利用粘着的基础上不能低于原车,以避免与原车混跑时影响运营;
(4)国产化系统部件重量不得大于原型系统的重量,以避免车辆配重不平衡。
[1]石红国,彭其渊,郭韩英.城市轨道交通牵引计算算法[J].交通运输工程学报,2004,4(3):30-33.
[2]饶 钟.列车牵引计算[M].北京:中国铁道出版社,2006.
[3]杜子学,杨 林,文孝霞.跨座式单轨列车牵引计算仿真系统[J].机车电传动,2010(1):52-54.
[4]王 娟,谢 谦,黄 宪.地铁车辆国产化探讨[J].铁道车辆,2003,41(8):25-28.
[5]陈文光,丁荣军.国产化北京地铁列车牵引电传动系统设计[J].机车电传动,2006(4):31-36.
[6]孙大南,刘忐刚,林文立,等.地铁牵引变流器直流侧振荡抑制策略研究[J].铁道学报.2011,33(8):52-57.
[7]BEIG A R,NARAYANAN G,RANGANATHAN V T.Modified SVPWM algorithm for three level VSI with ynchronized and symmetrical waveforms[J].IEEE Transactions on Industrial Electronics,2007,54(1):486-494.
[8]孙大南.地铁车辆牵引电传动系统控制关键技术研究[D].北京:北京交通大学电气工程学院,2012.
