基于压电自感减振器的振动控制研究
2015-01-22潘公宇王申申
潘公宇,王申申
(江苏大学汽车与交通工程学院,江苏镇江212013)
0 引言
利用智能结构对结构进行振动抑制,是近年来振动控制研究的热点问题。压电材料是近年来发展起来的新型智能材料,在光学、电子、航空航天、机械制造、生物工程和机器人等领域得到了广泛的应用[1]。近年来,国内外许多学者对压电自传感作动器应用于结构振动控制时传感与激励信号分离、控制算法优化等问题进行了深入研究[2]。Crwalye、DeLuls 和Hagwood将压电材料作为嵌入式的传感器和激励器用于智能结构中;Fnason、Cuaghey 和Hnaagud 等人把它用在主动减振系统中[3]。
本研究将压电材料运用在自感作动器上建立压电自感减振器,并建立起模型,然后进行实验和仿真分析,验证文中的压电自感减振器能很好地实现自感反馈的效果以及对智能结构振动的控制。与一般的结构相比,压电自感作动器结构具有如下优点:由于传感、作动完全集成在一起,这类结构在闭环控制稳定性方面,有较好性能,一般的压电结构的传感器、作动器的距离较近会产生电容耦合,从而影响模型的准确性,自感作动器结构可避免这种问题[4]。
1 压电自感减振器理论分析
1.1 压电自感减振器的介绍
压电自感减振器的结构主要由以下几个部分组成:基体结构材料、压电陶瓷传感器、压电作动器和控制系统[5]。压电作动器主要是由压电位移放大机构组成,如图1所示。压电作动器中使用了压电陶瓷材料,压电陶瓷材料能够产生很大的力,但是产生相对较小的位移。压电陶瓷作为驱动的实际执行情况,通常需要某种形式的压电应变放大。单晶片放大的实现是通过连接压电陶瓷片或是压电陶瓷盘到一侧的硬盖。双单晶片放大是指将两个单晶片串联起来,以加倍位移放大的效果。

图1 压电作动器(1)
1.2 压电作动器
在一个简化的布局中,压电作动器可以由作动器的方程描述:

那么传感器方程可以表示为:

式中:m,d,k—质量,阻尼和刚度矩阵;Cp—压电作动器的电容量;θ—机电耦合矢量;q—电荷;vp—施加于压电作动器的电压;x—机械位移;f—施加在作动器上的外力。
当仅考虑压电作动器的第一振动模式和对方程式(1~2)进行拉氏变换,运动方程可以变化成如下:

式中:YE—电纳;ZM—压电作动器的机械阻抗。
F(s)、X(s)、I(s)和vp(s)分别通过拉普拉斯变换成f(t)、x(t)、sq(t)和vp(t)的。从式(3)中得到的压电作动器的等效电路如图2所示。等效电路表明,压电作动器就像是一个理想的变压器并联一个电容。电能可以在转化率为θ 的条件下转化为机械能,反之亦然。
具有分支电路的压电作动器如图3所示。通过改变外部分流电路的阻抗,压电减振器的固有频率和模态阻尼会有所不同。在压电元件短路分流的情况下,所施加的电压vp=0。因此,可以得到如下运动方程:


图2 压电作动器(2)
在压电元件开路分流的情况下,应用电荷q=0 和vP=-θx/CP。因此,该作动器的方程可以得到:

式中:θ2/CP—压电电容的附加刚度。它主要是为了改变减振器的固有频率,那么一个大的机电耦合系数θ是必要的[6]。考虑电容分流的压电作动器,等效电路如图3所示,所施加的电压为:

运动方程可以得到为:

这表明,不同分路电容值对应一个短路电路边界条件,而非常小的分路电容对应于开路状态。外力施加在电路与电容并联的压电致动器上的质量位移传递函数可以显示如下:
作动器的固有振动频率可以由电容CS到压电电容CP的比例进行调整。固有振动频率等效于开路的固有频率,该比越接近零,那么固有频率等于短路固有振动频率时的比率越接近无穷大[7]。

图3 分支电路压电作动器的等效电路
1.3 自感式压电减振器
自感式压电作动器的自感电路如图4所示。自感式压电作动器可以作为一个集总电路元件被集成到电桥电路,也可等效为一个电容并联一个应变电流源[8]。在这个电路中,在恒定应变下的电容是指以CP为参考电容,电容器的电容CO为参考电容,两个电容分别并联两侧电阻RP和RO。驱动电压vc是从控制器到压电元件所施加的电压。输出电压v1由两个来源分别是控制器的电压vc和适当压电材料的应变电流电压ie。在v2上的信号是由一个单一的电压源是由电压发生器vc触发的。自感信号电压vs为:

用拉氏变换的可变电压vs为:
如果电路元件选择RPCP=R0C0,那么:

当感应频率为ω≪1/RPCP,那么获得的传感器信号为:


图4 自感电路
自感反馈控制压电作动器的反馈电路如图5所示。在这个电路中,在恒定应变下的电容是指以CP为参考电容,电容器的电容CO为参考电容,两个电容分别并联两侧电阻RP和RO。驱动电压vc是从控制器到压电元件所施加的电压。输出电压v1和v2上的信号通过反馈电路而改变,并且通过改变反馈增益g 来改变电压发生器vc。它的运动方程如下所示:

2 压电自感减振器的建模
考虑压电减振器连接到一个单自由度系统,如图6所示。本研究假设M 和K 分别代表结构的有效质量和刚度,m、d、k 分别代表压电减振器的质量、阻尼和刚度。当M 在外力Pejwt激励下,方程系统的运动可以得到如下:

图5 反馈电路


图6 连接单自由度系统的压电减振器
压电元件在分流的情况下施加电压。因此,运动方程可以得到如下:

主系统的振动振幅和动力:

在压电元件开路的情况下,应用电荷q=0 和vP=-θ(x-y)/CP。因此,该系统的运动方程可以得到:

主系统的振动振幅和动力减振器通过拉氏变换得到:

有分支电路的压电作动器。考虑电容分流压电振动减振器,所施加的电压为:

因此运动方程可以推导为:
考虑电阻分流压电振动减振器的,所施加的电压为:

因此运动方程可以推导为:

对于带有自感反馈控制的压电减振器,在它的自感电路中具有电阻分支电路的压电减振器。因此,运动的方程可为:

伴随着正的速度反馈,所施加的电压为:vC(t)=。因此,运动的方程可为:

主系统的振动振幅为:

3 实验与仿真
实验装置示意图如图7所示。在实验中,一个振动器用来激励压电作动器。为了评价该动态减振器的性能,该实验是通过在下部和上部安装力传感器和加速度传感器,它们的作用是评估动态减振器的振动减振性能。
实验装置如图8、图9所示。
实验室设备的类型如表1所示。在自感反馈电路,使用了3 个运算放大器[9]。在实验中,振动可以被输入振荡器得到正弦波,并且它检测到该附加质量的加速度,使用加速度传感器和力传感器传送数据。该实验设备均在30 s 后根据来自力传感器和加速度传感器的数据来确定传递函数。

图7 实验装置
压电减振器的各个参数如表1所示,可以对其进行仿真,得到结果,然后和实验数据进行一下简单的比较。

图8 压电减振器

表1 压电减振器各个参数

图9 具有自感电路的压电减振器
压电减振器的各个系数如表1所示。可以对其进行简单的仿真得到结果,然后和实验数据进行一下比较。改变压电作动器的分流电容,得到在开路和短路情况下的频率响应如图10所示。电容分流的实验结果如图11所示。
本研究利用上述的实验和仿真数据,改变自感作动器反馈增益得到它的反馈控制结果如图12所示。
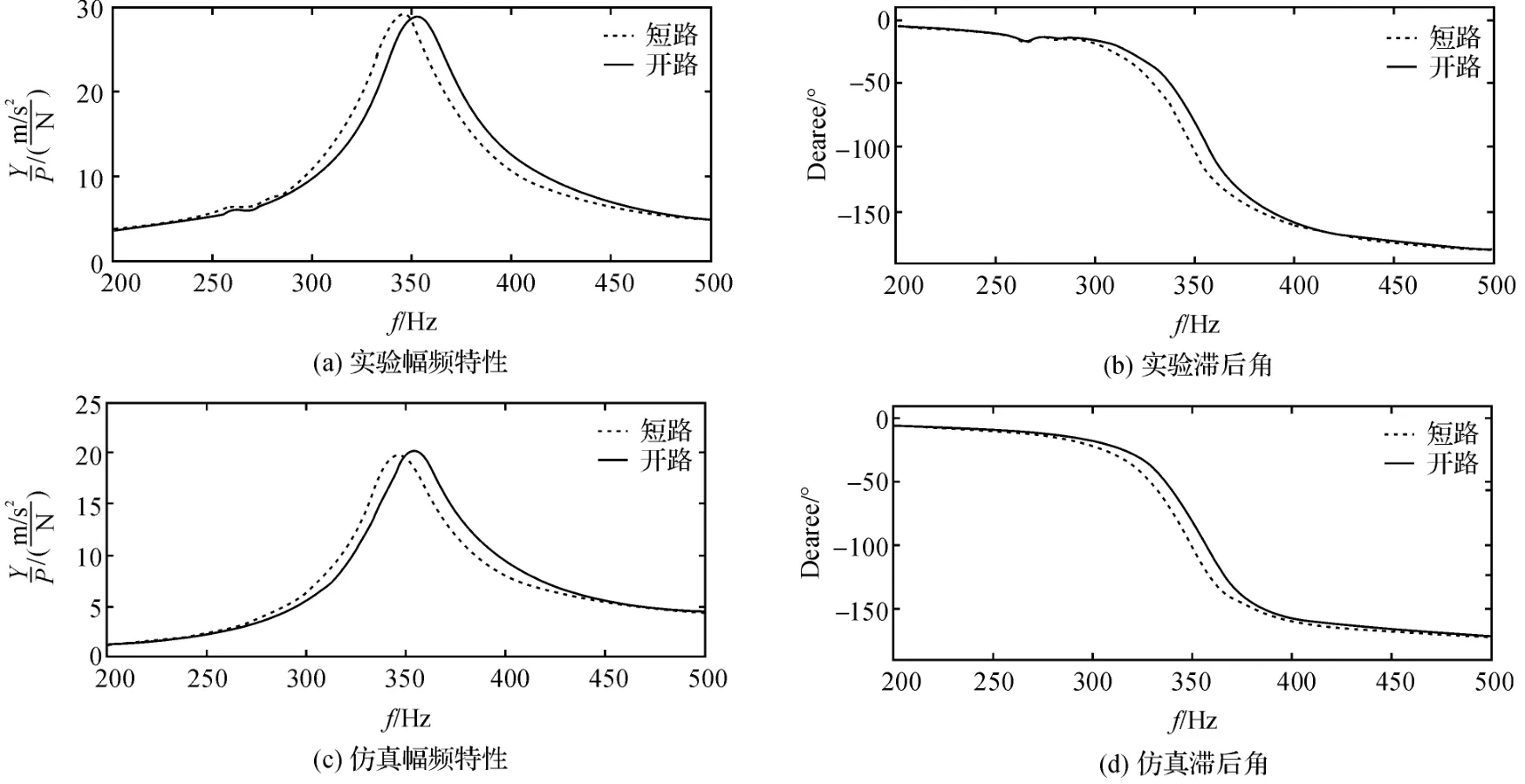
图10 开路和短路时的频率响应

图11 电容分流的实验结果
分析结果表明,分流电容器可以改变了刚度,从而改变了装置的固有频率。不同分路电容的值相当于不同短路电路的边界条件,而非常小的分路电容相当于开路状态。此外,该分流电容电路改变固有频率和增加能量消耗。若分流电容被选择得当,该阻尼可显著增加。图12 是通过改变其反馈增益得出的实验和仿真结果,分别选择g=-10、-5、0、5、10,通过图12 可以看出,该压电振动减震器的阻尼比是通过使用自感应的电压信号来反馈。此外,反馈增益g 可以根据压电减振器的阻尼比可以从负数到正数来设定。
通过本研究对压电减振器的特性分析可知,用户可以调节压电减振器的特性,固有频率的改变可以通过对并联电容器进行更改,而阻尼比可以为自感提供反馈。
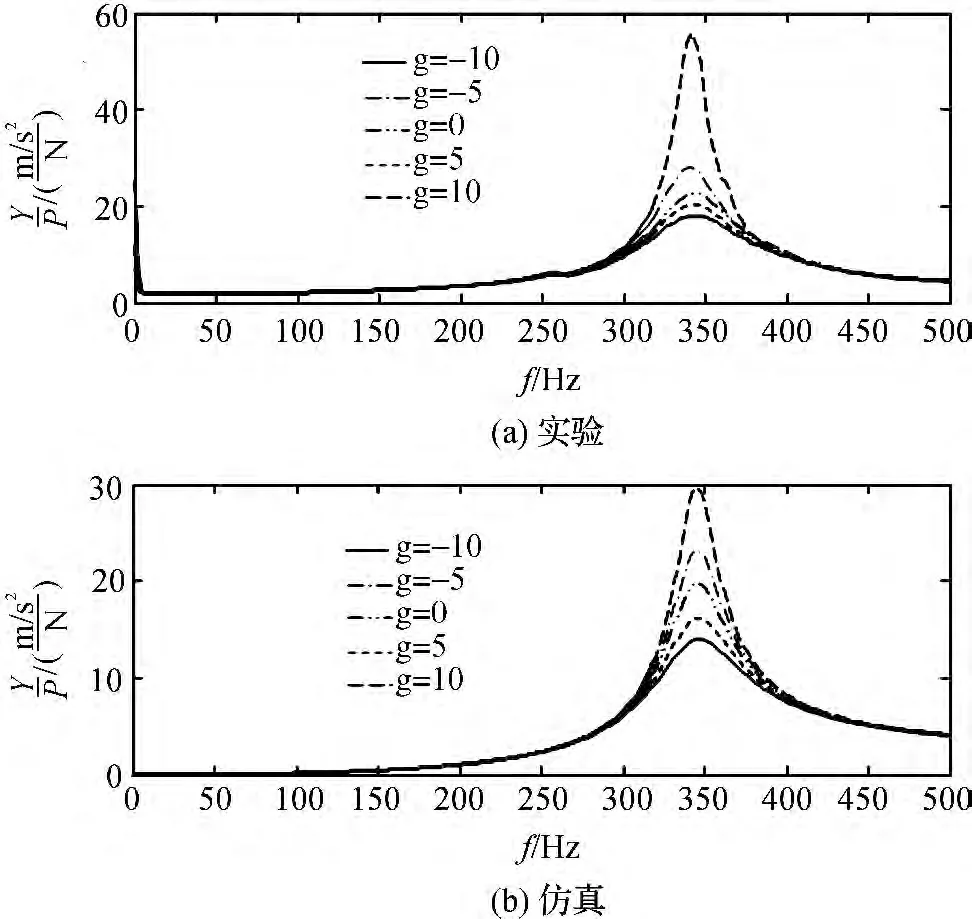
图12 减振器的频率响应
4 结束语
本研究中开发的是压电减振器的动态模型,并从细微的特性来分析,为以后压电减振器的研究提供了基础,同时软、硬件仿真试验结果证明该系统能很好地实现自感反馈的效果以及对智能结构振动的控制。
本研究为以压电自感减振器器为核心的振动控制装置应用于结构振动、噪声的主动控制奠定了基础和创造了良好的条件[10-11],也为压电减振器运用到汽车行业来减小汽车振动提供了有力的保障。
致谢
本研究从选题到完成都是在导师的悉心指导下完成的,在论文写作过程中,老师多次询问我研究进程,耐心为我解决疑难问题,帮助我拓宽论文思路。在此我向潘公宇老师致以我崇高的敬意和诚挚的感谢。同时我也要感谢实验室的老师给予我实验上的帮助。
[1]陶宝祺.智能材料结构[M].1 版,北京:国防工业出版社,1997.
[2]董维杰,孙宝元,崔玉国,等.基于压电自感知执行器悬臂梁振动控制[J].大连理工大学学报,2001,41(1):77-80.
[3]GIOVANNI C.A critical analysis of electric shunt circuits employed in piezoelectric passive vibration damping[J].Smart Mater Struet,2001(10):1059-1068.
[4]崔艳梅,刘向锋,高 志.大位移压电陶瓷驱动器的设计与试验[J].功能材料与器件学报,2007,13(6):507-511.
[5]DAVIS C L,LESIEUTRE G A.An actively tuned solid-state vibration absorber using capacitive shunting of piezoelectric stiffness[J].Journal of Sound and Vibration,2000,232(3):601-617.
[6]LESIEUTRE G A,RUSOVICI R,KOOPMANN G H,et al.Modeling and characterization of a piezoceramic inertial actuator[J].Journal of Sound and Vibration,2003,261(4):93-107.
[7]孙 涛,谭久彬,董 中.压电陶瓷微驱动器用于超精定位的技术研究[J].压电与声光,1999,21(2):493-497.
[8]崔海涛.压电智能悬臂梁的被动与主动振动控制研究[D].兰州:西北工业大学航空学院,2004.
[9]季宏丽.智能结构的自感主动振动控制以及半主动振动控制的研究[D].南京:南京航空航天大学机电学院,2007.
[10]孙智慧,李 伟.压电振动给料技术及装置的研究进展[J].包装与食品机械,2013(3):55-59.
[11]吴欣慧,杨军平,秦长海.压电微位移驱动器的高精度控制系统设计[J].中国科技信息,2009(14):163-164.
