电传动履带车辆转向补偿控制策略研究*
2015-01-22涂群章张晓辰郑伟杰
涂群章,张晓辰,潘 明,冯 霞,郑伟杰
(解放军理工大学野战工程学院,江苏南京210007)
0 引言
电传动履带车辆凭借其良好的动力性以及在节能、环保、降噪方面的杰出表现,近年来在农业、矿用工程机械和军用车辆领域得到了广泛应用[1-2]。转向控制是电传动履带车辆驱动系统研究的重难点方向,主要体现为:高速转向过程中功率需求大、平稳性差;低速转向过程中系统响应能力差、转向可控性不强[3]。
近年来,在转向控制策略方面,国内外学者开展了大量理论分析与实验研究,目前应用最广泛的是直接转矩控制策略,该控制方法简单易行,但控制效果有限,无法实现对驾驶员瞬时操控意图的快速响应[4];在控制其设计方面,研究人员普遍采用离线仿真技术和实车测试方法,但离线仿真不能真实反映驾驶员的实时操控意图,而实车测试往往周期较长,成本较高。
为了解决上述问题,提高电传动履带车辆转向系统的响应能力和工作效率,本研究针对转向补偿控制策略的设计与实时仿真验证展开研究。
1 面向实时控制的系统模型建立
1.1 履带车辆动力学模型
为研究电传动履带车辆的转向控制策略,需首先对车辆转向过程进行动力学分析,建立面向实时控制的车辆动力学模型。基于相对转向半径,电传动履带车辆转向,可分为大半径修正转向、再生制动转向、小半径转向3 种工况。对于采用双侧电机独立驱动布置方式的车辆而言,通过精确、合理地控制两侧驱动轮转速差,即可根据驾驶员意图实现不同工况的转向。典型的车辆转向运动平面如图1所示。

图1 车辆转向动力学示意图
本研究将车辆转向运动简化为具有集中质量的刚体平面运动,忽略车辆的侧倾和俯仰,只考虑履带纵向运动。考虑到转向速度不高,忽略离心力对转向稳定性的影响,不计履带的滑转、滑移,根据平衡关系可建立履带车辆动力学模型:

式中:m—整车质量;Iz—转动惯量;R—转向半径;n1,2—双侧驱动轮转速;i0—减速器传动比;r—驱动轮半径;μ—转向阻力系数,由A.O.尼基金经验公式[5],取μ=μmax/(0.925 +0.15R/B);Mh—转向阻力矩,当转速不为零时取Mh=μLG/4。
由于车辆行驶过程中的牵引力F1,2由驱动电机提供,在实际情况中需综合考虑地面附着力和电机驱动能力对最大牵引力的影响,因此双侧履带牵引力可表示为:

式中:T1,2—双侧电机驱动(制动)力矩,φ—地面附着系数,ηm—侧传动效率,ηt—履带效率,α—表征制动状态的参数。
1.2 驱动电机模型
电传动履带车辆的转向动力学特性取决于电机的驱动控制特性,因此有必要对电机驱动系统进行建模。由于工况仿真时只需要获取驱动电机转子端的输出转矩和转速,不关注电机内部电流电压的变换关系,本研究在建模中采用基于台架实验的查表计算模型,考虑控制响应时间的电机转子端输出转矩可表示为:
式中:Treq—目标转矩;Ttmax(n),Tbmax(n)—转速为n 时的电机最大驱动与制动转矩;τ—由实验标定的输出响应时间。
本研究选用三相交流永磁同步电机作为驱动电机,在仿真进程中目标转矩根据不同转速范围的电机外特性曲线进行限幅。
根据台架实验测得的电机转矩-转速-效率特性图如图2所示。通过图2 中的特性曲线和不同转速下的效率分布即可在Simulink 中准确建立驱动电机的查表模型。
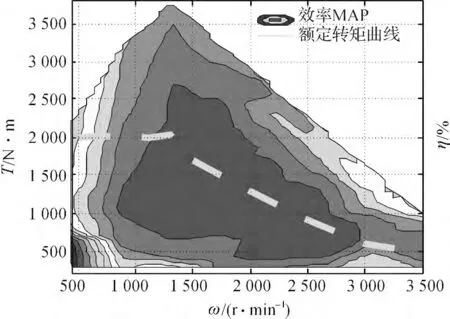
图2 驱动电机转矩-转速-效率特性MAP 图
2 电驱动系统转向控制策略
在转向方式上,电传动履带车辆通过调节驱动电机正/反转输出转矩来实现车辆转向。这种方式能够大幅简化转向机械结构,但对系统的控制提出了更高要求。转向控制策略设计的基本原则为:能够及时有效地解读驾驶员的操作意图,结合不同行驶工况合理分配、确定双侧电机的目标转矩,实现车辆的安全、快速转向。
2.1 驾驶员输入定义
在基于转矩调节的动力学控制策略中,驾驶员不必考虑外界阻力变化的影响,只需通过对实时行驶信息进行判别、处理即可完成对车辆的操作控制。采集的驾驶员输入信号主要包括:加速踏板信号、制动踏板信号和方向盘信号。将加速/制动踏板的输入信号定义如下:

式中:δ,δmax,δ0—加速/制动踏板的瞬时角位移、最大角位移、自由行程角位移。本研究中δ0、δmax分别5°、60°。取k 为符号函数,驱动时取1,制动时取-1。
电传动履带车辆能够实现3 种不同半径的转向工况,因此将方向盘转角划分为3 个过渡区,以便实现双侧电机的驱动/制动状态切换。根据方向盘的对称性,只考虑其左转情况,将方向盘输入信号定义如下:

式中:λ,λ0,λ1,λ2—转向盘瞬时转角、自由行程区切换转角、双侧驱动区切换转角、单侧驱动/制动区切换转角。本研究设定的λ0、λ1、λ2值分别为18°、90°、180°。当方向盘由λ0向左旋转到λ2时,ψ 值由1 线性递减为-1。
2.2 直接转矩转向控制策略
转向过程当中,为了使车辆迅速响应驾驶员操纵意图,需控制外侧电机目标转矩始终大于内侧转矩,且最好形成较大转矩差,基于此制定的转向控制策略如表1所示。
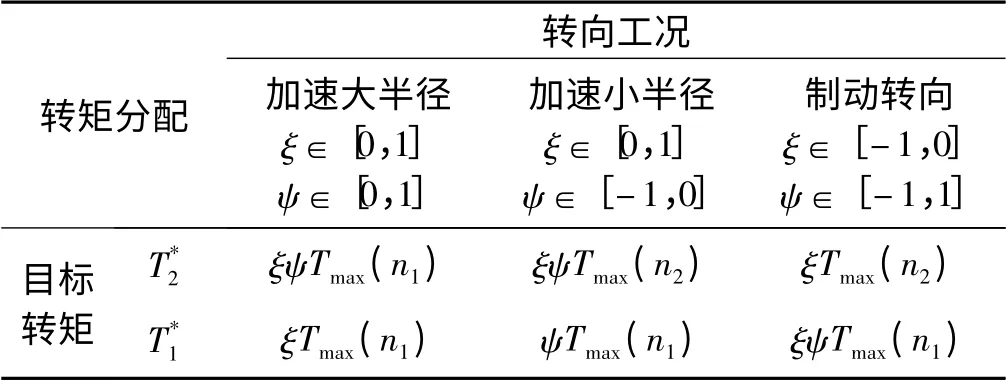
表1 基于转矩调节的转向控制策略
转向完毕后,为保证车辆尽快回正,应根据驾驶意图迅速缩小内外侧电机转矩差或为车辆提供与原转向方向相反的负转矩。因此在设计回正策略时可控制车辆进行逆转向,基于转矩调节的回正控制策略如表2所示。
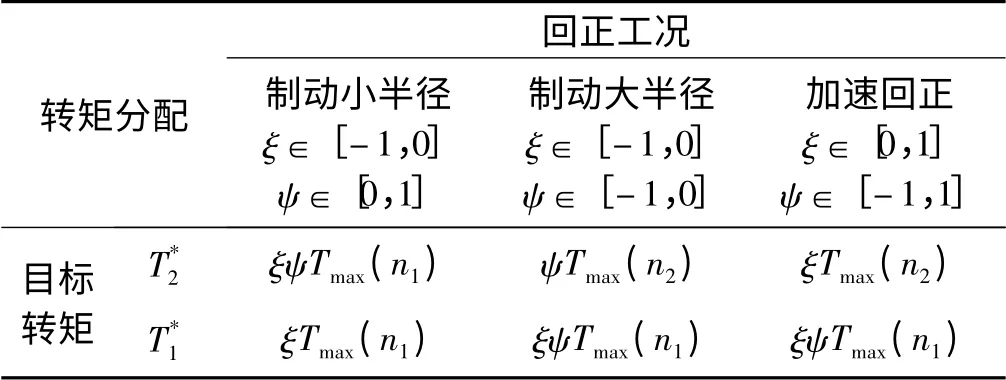
表2 基于转矩调节的回正控制策略
结合表(1,2)及对驾驶输入信号的定义可以看出,当同时操纵踏板和方向盘时,基于转矩的控制策略能够从一定程度上解读驾驶意图并控制车辆完成不同的转向/回正工况,但其控制效果往往取决于策略中门限值的设定。当踏板位移或方向盘转角位于状态切换值附近时,状态的频繁转换使系统无法及时跟随驾驶意图,进而影响车辆的转向效率与回正安全性。基于该情况,本研究在转矩调节的基础上引入模糊控制以提高电传动履带车辆的转向/回正相应速度。
2.3 基于模糊的转向补偿控制策略
模糊控制是一种拟人化的控制方法,它以模糊数学和模糊逻辑推理为理论基础,首先将输入变量模糊化,再按照控制器中预先设定的模糊规则进行判断、分类与决策,最终将推理结果解模糊化,输出实际系统易于识别的控制量,从而实现对系统的智能控制[6]。
由前面分析可知,车辆转向过程中,由于电机低速时制动效率不高,本研究重点考虑对外侧电机驱动力的控制。外侧驱动转矩增长速度越快,车辆的转向效率和灵敏度就越高。而当驾驶员有回正意图时,外侧电机转矩衰减速度越快,车辆回正所需的时间也越短。因此,本研究为了合理描述驾驶员的转向/回正意图,选取方向盘转角λ、转角变化率dλ/dt、加速/制动踏板开度a 作为模糊控制器的输入量,选取外侧电机转矩调节系数κ 作为输出量,选择S、MS、M、MB、B 作为输入/输出量的模糊子集。
根据驾驶经验设计的输入/输出隶属度函数如图3所示。
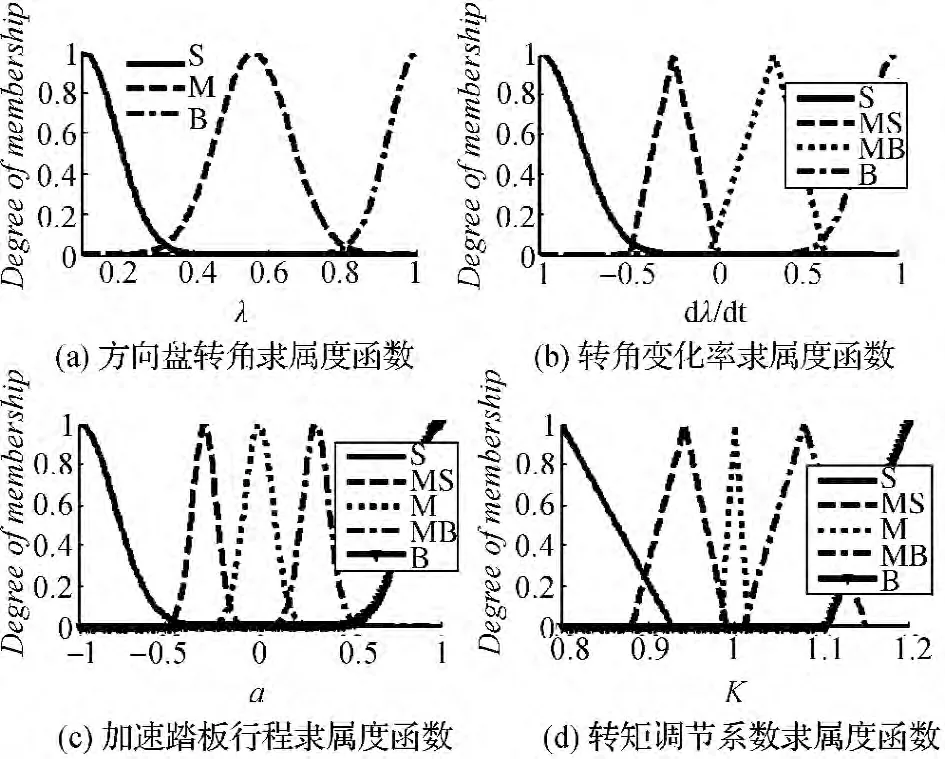
图3 模糊输入/输出量的隶属度函数
经模糊控制器调节后输出的外侧电机转矩可表示为:

模糊策略的基本思路为:
(1)当方向盘行程λ 较小且车辆有转向意图时(dλ/dt >0),给外侧驱动转矩一个较大增量以便车辆迅速进入转向状态;
(2)当方向盘行程较大且车辆有回正意图时,给外侧电机一个较大的衰减量以便车辆及时回正;
(3)当驾驶员有明显加速转向/回正意图时,给电机转矩一个较大增量/衰减量以满足控制需求。反之,当制动踏板行程较大时则需降低增量/衰减量以尽量维持原行驶状态;
(4)当方向盘处于中间行程且无明显加速/制动意图时应弱化模糊控制调节效果,系统将根据驾驶员输入对驱动转矩进行线性调节。
根据以上规则,本研究采用Mamdani 解模糊化算法,为模糊控制器设计出60 条模糊规则,模糊规则的语法形式为“if λ and dλ/dt and a,then κ”。
3 转向系统半实物仿真平台的建立
为保证所设计转向控制策略的实时高效性,需要结合具体工况对其进行仿真验证。传统离线仿真技术虽然较为方便,但是鉴于其仿真输入信号由人为确定,不具备随机性,无法模拟驾驶员的真实操控需求。另一方面,由于离线仿真的控制策略未能转换为代码写入测试控制器,其运算的实时高效性难以得到验证。基于上述问题,本研究采用dSPACE 系统,将驾驶员输入设备与测试控制器作为在环硬件,对转向控制策略进行半实物仿真验证。
dSPACE 实时仿真系统由德国dSPACE 公司开发,该系统具备与Simulink 的无缝连接技术,可将创建的Simulink 模型自动转换为C 代码并下载到dSPACE 系统中[7]。系统配备丰富的I/O 接口和强大的实时计算能力,能够在真实环境下对控制器进行高效测试[8-10]。
本研究选用 MicroAutoBox1401/1504 作为dSPACE 硬件,整车与电机模型在上位机终端中建立,并通过RTW 接口编译、下载到dSPACE 中。控制策略模型则首先通过Stateflow 编译,再由TargetLink 转码并下载到测试控制器中。驾驶员信号通过驾驶员输入设备采集并输入到控制器当中,控制器通过A/D 转换读入信号,通过CAN 接口卡与dSPACE 通讯,接收双侧电机的转矩信号。基于Controldesk 创建的虚拟仪表储存在监控机当中,为驾驶员提供车辆的实时行驶信息。
本研究采用的系统硬件和创建的监控界面如图4、图5所示。

图4 半实物仿真平台硬件
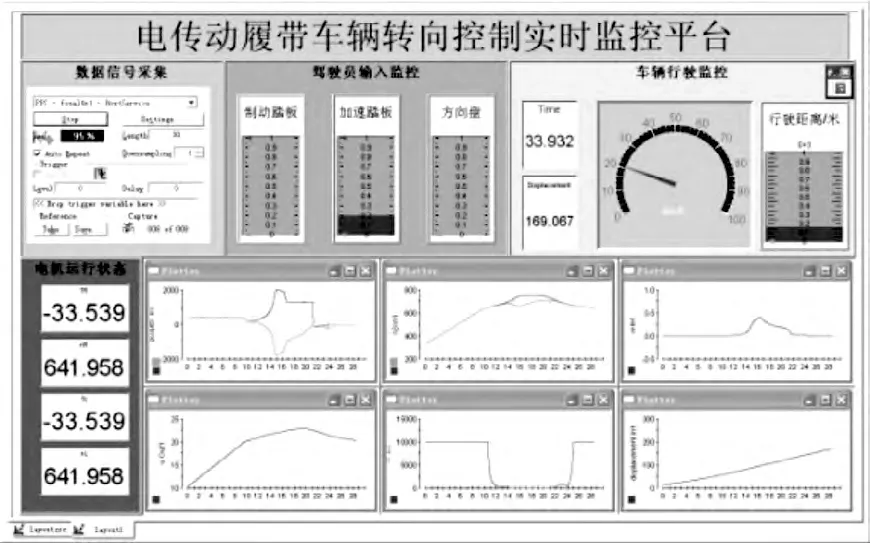
图5 基于Controldesk 的转向行驶监控界面
4 实验与结果分析
本研究的研究对象为电传动履带车辆,实时仿真的参数设置参考某型12 t 履带式推土机的设计参数[11]。仿真中主要参数的设置如表3所示。
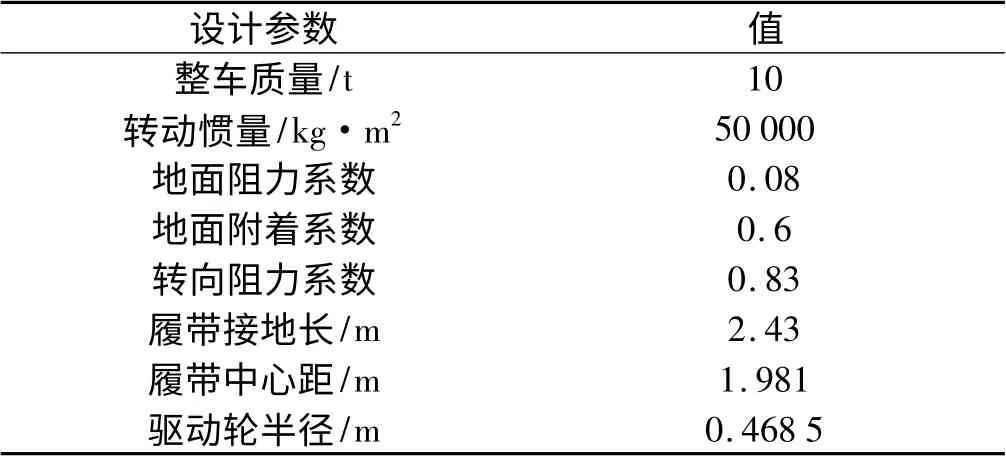
表3 仿真中主要参数的设置
为了检验系统的转向与回正效率,选择具有代表性的加速转向过程和加速回正过程作为仿真参考工况。在仿真进程中,驾驶员根据监控仪表随时获取车辆行驶状态,通过操控方向盘与踏板使虚拟转向系统完成预定的转向/回正工况。
由监控机采集的仿真结果如图6所示。
车辆行驶中的横摆角速度及驾驶员输入设备输出的方向盘、加速踏板信号如图6(a)所示。可以看出,在10 s~15 s 阶段,驾驶员控制车辆加速转向;在15 s~20 s 阶段,车辆处于平稳转向状态;在20 s~25 s 阶段,车辆加速回正。横摆角速度的变化趋势与加速踏板基本一致,说明车辆能够较好地响应驾驶意图。
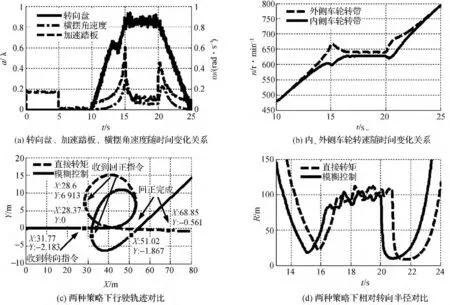
图6 转向/回正控制半实物仿真结果
转向/回正过程中双侧电机的转速变化如图6(b)所示。转向过程中,外侧电机转速不断提高,内侧电机转速不断衰减,较大转速差的形成有助于车辆实现快速转向。当车辆进入稳定转向阶段时,双侧电机转速趋稳,模糊控制的影响降低,有助于维持驾驶稳定性。回正过程则可以视作“逆转向”过程,其转速变化情况与转向工况相反。图6(c)、6(d)对比了两种控制策略的转向控制效果。车辆的行驶轨迹如图6(c)所示,当车辆收到转向/回正指令时,加入模糊补偿的转矩控制策略能够帮助车辆实现快速转向/回正,而直接转矩控制对驾驶员意图的响应较慢。两种控制策略下的车辆相对转向半径如图6(d)所示,可以清楚地看到,与直接转矩控制相比,加入模糊补偿的控制策略在转向和回正工况中均能明显提高系统的信号响应能力(响应时间分别提前了0.873 s 和0.550 s),进而优化了车辆的转向灵敏度。
5 结束语
本研究以电传动履带车辆转向控制策略为研究对象,通过实时仿真得到了以下结论:
(1)建立了面向转矩实时控制的履带车辆转向动力学模型,结合电机效率及外特性台架实验建立了驱动系统模型;
(2)在原有转向控制策略的基础上,基于模糊理论提出了一种转向/回正补偿控制策略;
(3)本研究基于dSPACE 半实物仿真技术建立了驾驶员-测试控制器在环的转向控制实时仿真平台,对提出策略进行了仿真验证。仿真结果表明:与直接转矩策略相比,基于模糊的转向补偿控制策略提高了系统的转向和回正响应能力(系统响应时间分别提前了0.873 s 和0.550 s),为同类车辆的转向系统稳定性与灵敏性研究提供了参考。
[1]JANARTHANAN B,PADMANABHAN C.Lateral dynamics of single unit skid-steered tracked vehicle[J].International Journal of Automotive Technology,2011,12(6):865-875.
[2]WONG J Y.Theory of ground vehicles[M].3rd ed.Ottawa:John Wiley & Sons Inc,2011.
[3]孙逢春,张承宁.装甲车辆混合动力电传动技术[M].北京:国防工业出版社,2008.
[4]陈泽宇,赵光耀,翟 丽.基于模糊PID 算法的双侧电传动履带车辆转向控制策略研究[J].中国机械工程,2013.2(24):410-425.
[5]王良曦,王红岩.车辆动力学[M].北京:国防工业出版社,2008.
[6]闻 新,周 露,李东江.Matlab 模糊逻辑工具箱的分析与应用[M].北京:科学出版社,2001.
[7]马云龙,章 玮.开关磁阻电机的模糊自适应简化控制[J].机电工程,2014,31(1):93-96.
[8]徐丽芳,宋文斌.交流电动控制技术在叉车中的应用研究[J].机电工程,2010,11(1):58-59.
[9]徐东明,舒利盛.具有弱磁调速功能的直流他动电机控制器[J].轻工机械,2013,31(3):40-42.
[10]于亚利,武 丽.过程控制实验平台的设计与实现[J].机电工程,2010,8(8):36-37.
[11]THAI T D,Tatsuro Muro.Numerical analysis to predict turning characteristics of rigid suspension tracked vehicle[J].Journal of Terra-mechanics,36(2013):183-196.
