基于ADAMS的货叉式AGV稳定性研究
2015-01-21陆久云
车 睿,陈 金,陆久云
(机科发展科技股份有限公司,北京 100044)
0 引言
货叉式自动导引车(AGV)主要用于托盘类物料的搬运,可以实现机台到机台、机台到地面、地面到地面、以及叠放托盘等多种模式,可以解决不同高度、不同区域多站点间的物料输送。根据保定物流输送系统设计要求,货叉式AGV 最大举升高度达到4300mm,货叉长度达到1800mm,这些都对自动导引无人操作的AGV 带来难度,能否安全平稳运行是设计阶段必须严肃考虑的问题。而在车间工作环境中不可避免的会出现地面不平整的现象,必须提前对可能发生的情况进行预判,以便在设计阶段更有针对性的提出安全保护措施。ADAMS 软件正是专门用于机械产品虚拟样机开发研究的工具,通过虚拟试验和测试,在产品开发阶段就可以发现设计缺陷,提高产品性能。
1 高举升货叉式AGV 实体建模
本文采用Pro/E 对此货叉式AGV 进行三维建模设计。货叉式AGV 主要结构包括车体、门架、货叉、驱动轮、万向轮、液压系统、电气系统等。
三维模型建立的好坏程度对于虚拟样机的仿真分析结果影响很大,为了让虚拟样机的模型更加贴近实际,在建立三维模型时要严格按照实际尺寸来建立模型。为了减少导入ADAMS 中的模型需要添加的约束数量和提高进行运仿真过程的效率和成功率,建模时对AGV 的部分结构进行了简化处理。简化的原则是不能对AGV 工作装置的受力状况产生较大的影响。简化处理如下:①删除了不影响结构强度的电气元件;②将部分零件的螺栓固定直接设定为整体焊接关系,可以减少模型中零件的数量,提高计算速度。
除了AGV 本身,还应添加工作环境模型,如纸卷和地面,在地面上直接加入沟槽、台阶等路面情况。根据国家标准GB/T20721-2006 自动导引车通用技术条件对于环境适应性有如下要求,路面台阶高度的最大允许值需小于5mm(含5mm)。
2 AGV 虚拟样机模型建立
2.1 模型的导入
鉴于ADAMS 自身建模能力比较欠缺,所以先在专业的三维造型软件Pro/E 中建立系统的模型。下一步就是三维模型导入ADAMS 中,Pro/E 和ADAMS 的数据接口需要通过Parasolid 标准来完成。
具体步骤为将上一节中在Pro/E 中建立好的三维模型另存为Parasolid 格式,在ADAMS 中选择Import 命令,选择AGV 模型文件,单击用户界面的render 命令将模型以实体方式显示。
2.2 模型参数设置
将AGV 模型导入ADAMS 后,共有39 个零件。但是之前在Pro/E 中的装配关系会失效,各个零件都处于自由无约束的状态,还需要定义各个零件之间的约束关系和材料属性等参数来建立虚拟样机。
(1)设置重力及单位。设置重力加速度的方向为垂直于地面,大小为g。单位选择MMKS 单位制。
(2)设置材料属性。在此AGV 虚拟样机中,主要涉及三种材料,车体、货叉、门架等为碳钢,车轮为聚氨酯,地面为混凝土。如表1 所示。
(3)添加约束及运动副。ADAMS 中各零件之间的运动关系是通过添加约束和运动副来实现的,约束和运动副是否添加合理直接关系到仿真结果的准确性。在此模型中,主要的运动副有固定副、直线副、旋转副、铰链链接等: ①固定副,如车体和外门架,车体和车罩等;②旋转副,如车体与驱动轮、门架与门架导轮、货叉与货叉导轮等;③铰链链接,链条与货叉、链条与内门架等;④直线副,液压缸等;
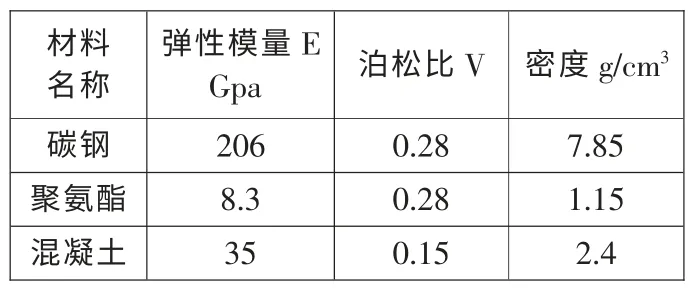
表1 材料属性设置Tab.1 Setting up the material propert ies
2.3 ADAMS 接触理论研究
在ADAMS 中接触力由两个部分组成: 一个是由于两个构件之间的相互切入而产生的弹性力;另一个是由相对速度产生的阻尼力。其广义形式可以表示为:
F=Fn+Ft
式中: Fn—弹性力;Ft—摩擦阻尼力。在ADAMS 中求解弹性力有两种方法: 冲击函数法和恢复系数法[1]。这两种方法都来自于对法向接触约束的惩罚,刚体间的接触从理论上来说两物体不能相互穿透,即满足单边约束,接触力即是与实现这种互不穿透的接触有关。此种约束是将型位约束转变为几何约束。ADAMS 是用惩罚因子或拉格朗日乘子来处理。惩罚因子没有引入额外的方程和变量,对于计算求解更简单。而且理解起来也更容易,弹性力大小等于穿透量乘以物体刚度。而惩罚因子的缺点是惩罚系数的设置,若惩罚系数过大,就会导致积分求解困难,过小则会起不到好的惩罚效果。冲击函数法求弹性力的模型为:
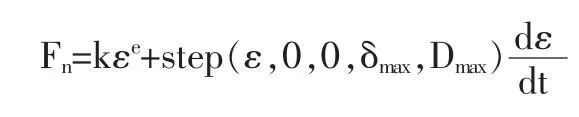
其中,ε—穿透量;K—刚度系数;e—力指数。最后一项为接触碰撞过程中的能量损失,dε/dt—接触点的穿透速度,step 函数是ADAMS 的内部函数,由三次多项式构造的阶跃函数。ADAMS 中计算弹性力Fn需要确定四个参数,接触体的刚度系数K、力指数e、阻尼系数D 以及最大穿透深度δmax。其中后三项系数可以直接使用ADAMS 中的默认值,下面介绍一下刚度系数K 的计算。
一般情况刚度值越大,积分求解越困难,但是若刚度值过小,就不能反映两个构件之间的实际接触情况。刚度是一个常数,根据赫兹接触理论[2]:
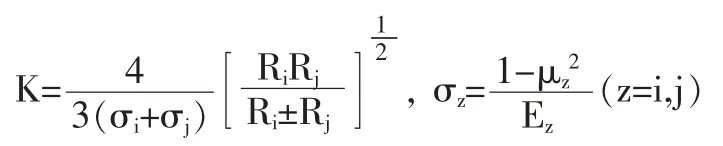
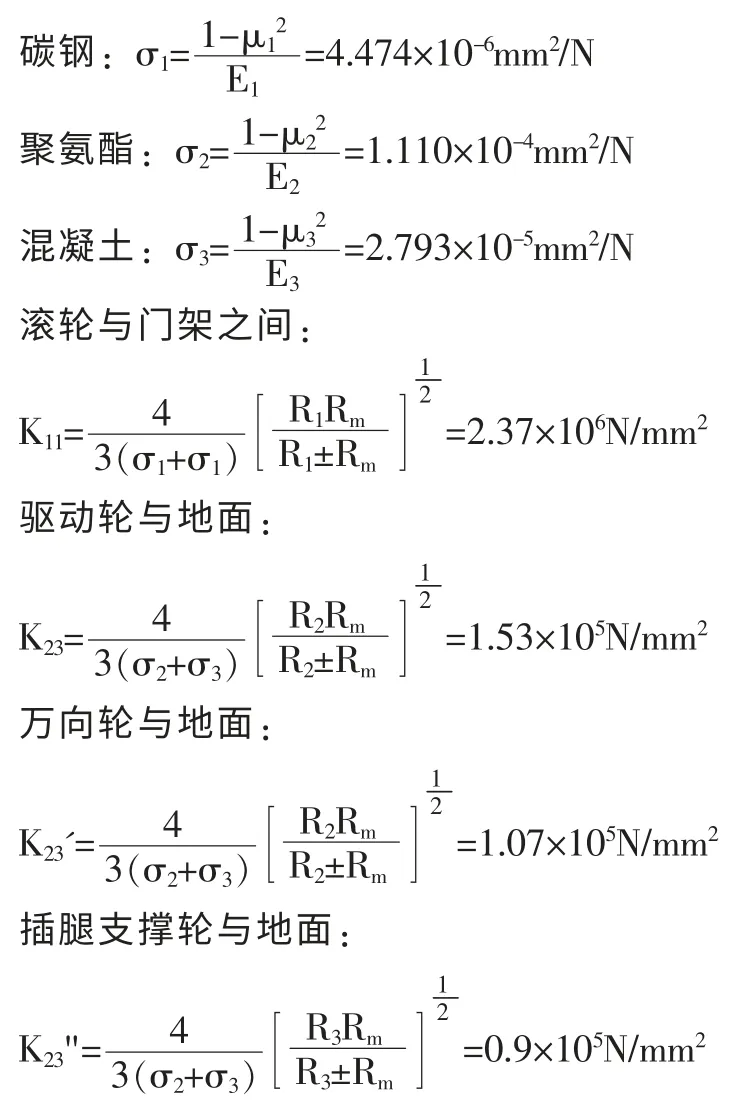
式中: Ri、Rj—接触体在接触点的曲率半径,正值为外接触,负值为内接触。μz—物体的泊松比;Ez—弹性模量,在表1 材料属性设定中已完成定义。下面是不同接触材料之间的刚度系数计算过程:
3 AGV 仿真及结果分析
根据设计要求,AGV 使用工况为货叉高度4300mm,载重850kg,货物位于叉尖,重心距货叉根部距离为1525mm。
仿真中执行动作的顺序是首先由中间液压缸通过链条带动货叉升起,此时门架不动;然后两侧的液压缸顶起中间门架,同时链条通过中间门架上的链轮将内门架升起;然后驱动轮启动,使AGV 向前行走,逐渐加速至最大速度。
现在仿真以下路面情况: 载重850kg,货 叉提升至最大高度4300mm,以最大举升运行速度0.5m/s 通过5mm 台阶路面测试稳定性。
图2 所示为纸卷与货叉的接触力随时间变化曲线。从图中可以看出,在仿真的前两秒,接触力波动较大,原因主要是在仿真开始前,由于没有重力,各零件都处于 “悬浮” 状态;仿真开始后,在重力作用作用下,各零件间发生接触碰撞,然后逐渐稳定,纸卷与货叉接触力亦稳定至8500N 左右。AGV 启动时,接触力再次发生波动。在经过台阶路面时先后发生两次较大波动,最大接触力达到17500N。在设计货叉强度时,要充分考虑这种冲击,安全系数需大于2。另一方面接触力始终大于零,说明纸卷与货叉始终保持接触。
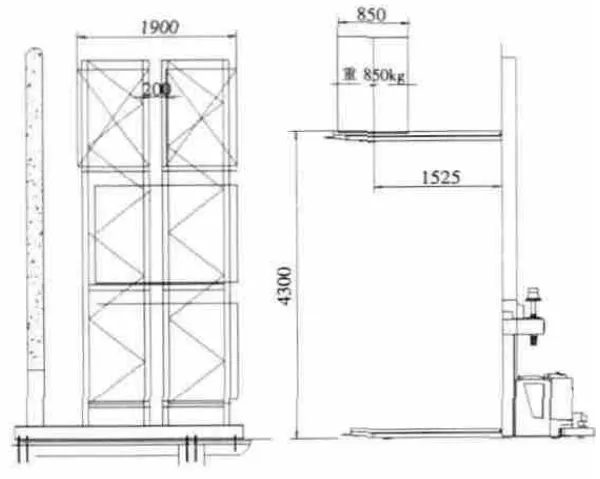
图1 AGV 使用工况Fig.1 Using conditions of AGV

表2 AGV 驱动参数Tab.2 Driving parameters of AGV
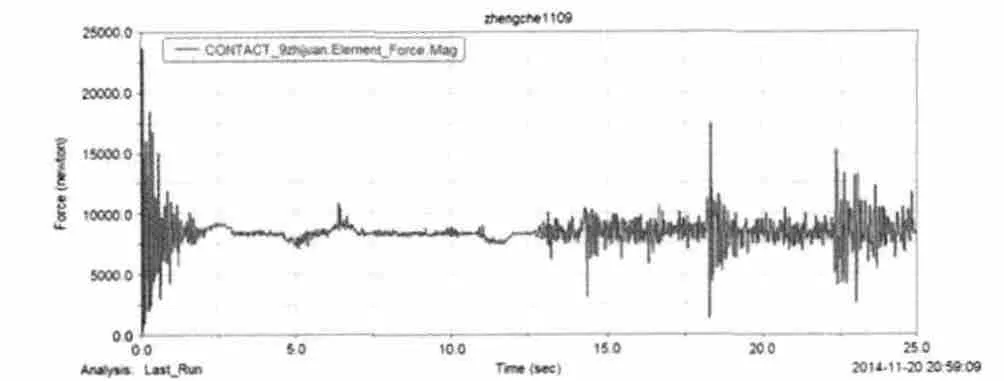
图2 纸卷与货叉的接触力Fig.2 The contact force of scroll and fork
图3 所示为纸卷在垂直方向上的跳动量,此图已过滤掉了货叉升起至4.4 米这一过程对货叉跳动的影响,能够直观看到货叉的真实跳动。12 秒AGV 启动向前行走,前后轮先后经过台阶路面,纸卷也发生两次较大跳动,最大摆动量达到了31.3mm。这一摆动量已经超出AGV 能够平稳运行的标准。并且此时AGV 正处于货架前取、卸货阶段,过大的摆动有可能导致货叉碰撞货架,这是极其危险的,必须避免。
图4 所示为货叉高举升时纸卷相对于货叉的窜动量,在经过台阶路面时,纸卷发生了向前的位移,最大位移值为3.2mm,能够满足使用要求,处于安全范围内。
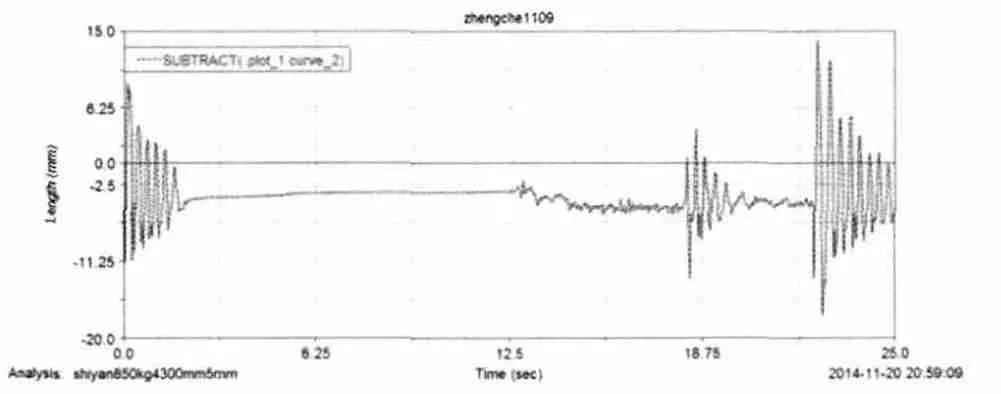
图3 纸卷垂直方向的跳动量Fig.3 The displacement of fork in the vertical direction
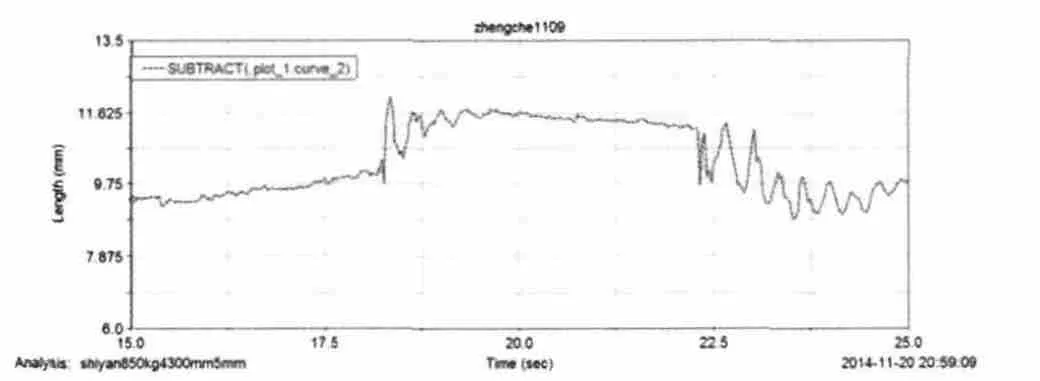
图4 纸卷前进方向的跳动量Fig.4 The displacement of fork in the moving direction
4 结论
以上通过对AGV 经过5mm 台阶路面的虚拟样机仿真,可以得出以下结论: ①AGV 负载850kg 纸卷通过台阶路面,货叉不论是高位还是低位,货叉与纸卷的接触力始终大于零,货叉与纸卷始终保持接触。另一方面由于台阶的冲击,最大接触力达到了纸卷重力的两倍,在设计货叉时安全系数必须大于2;②当货叉举升到最大高度4300mm 时,通过5mm台阶路面,纸卷跳动31.3mm,纸卷位置向前窜动3.2mm。而此时AGV 的工作状态正处于货架前装卸货物,过大的跳动可能导致定位不准、货叉刮蹭货架等危险情况发生,所以必须保证货架附近AGV 工位的地面质量。
[1] 范成建,熊光明,等.虚拟样机软件MSC.ADAMS 应用于提高[M].北京:机械工业出版社,2006.
[2] Edinberg D, Back K, McVeigh J. Modeling and simulation in the sealift program[J]. Naval engineers journal,1996,6.
[3] 李金欣. 基于虚拟样机技术的巷道堆垛机三维建模与性能分析[D].北京:北京科技大学,2013.
[4] 陈龙.空间可展开天线中间隙接触力的确定及其对展开性能的影响[D].西安:西安电子科技大学,2013.
