一种高压线巡检机器人的设计研究
2015-01-21黄荣舟李炳川汪明辉
黄荣舟,李炳川,陈 果,汪明辉
(西南科技大学,四川 绵阳 621010)
0 引言
高压输电线路长期暴露于野外,存在线路老化、电器闪络、材料老化等问题,需要及时发现并予以修复。传统的地面目测法劳动强度大,工作效率和探测精度低;航测法尽管探测效率和精度高,但技术难度大、运行费用高。为了解决上述问题,本文设计了一种高压线巡检机器人,其主要特征是能在电线上行进、具有一定的避障和爬坡能力,其避障方式为遥控或手动控制。
1 障碍物模型
在设计之初,本文通过查询高压线传输相关资料得知,高压线上常见的保护金具有悬垂线夹、防震锤、压线管等,故本文将高压线上的障碍物简化为以下三种: 压线管,防震锤,悬垂线夹。障碍物模型与参数如图1 所示。
2 机器人结构设计
本文设计的高压线巡检机器人能在电线上移动,完成线路的检测任务。机器人在线上的行进分为两个过程,其一为线上移动,其二为越障。针对机器人的行进特点,本文设计了以连杆机构为主的机械本体结构,以实现机器人在线上的行进与越障。机器人模型如图2 所示,图中的虚线为电线。机器人的机械结构主要由三部分组成:行走轮、开合掌机 构、滑 台 机构。机器人依靠三对行走轮在线上行进,行走轮可以直接通过高压线上的小型障碍物;开合掌机构的升降功能可改变行走轮的高度和开合角度,从而越过障碍物;机器人在越障和爬坡过程中通过移动滑台机构改变质心,保证自身行进的稳定性。
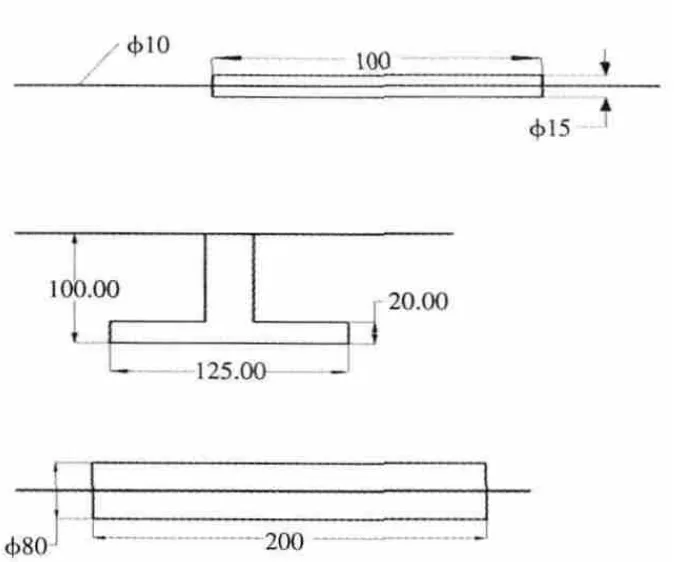
图1 障碍物模型Fig.1 Model of obstacles
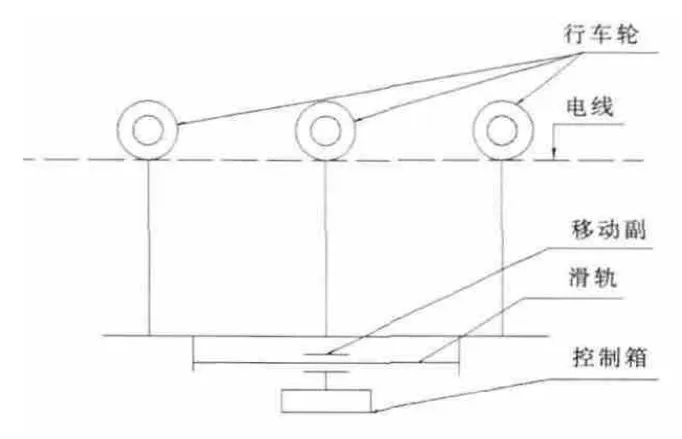
图2 机器人简图Fig.2 Schematic diagram of the robot
2.1 行走轮设计
本文设计的行走轮如图3 所示。图中60°的夹角增大了线与行走轮之间的摩擦力,增加小车的行走能力以及提高行走的坡度。由于行走轮的左右两个半轮具有离合性,在两个半轮合并时,为了保证它们之间的转动同步同时减少能量损失,故在左右轮上分别加工处理成带有互补形状的方块,使之能够正确啮合。
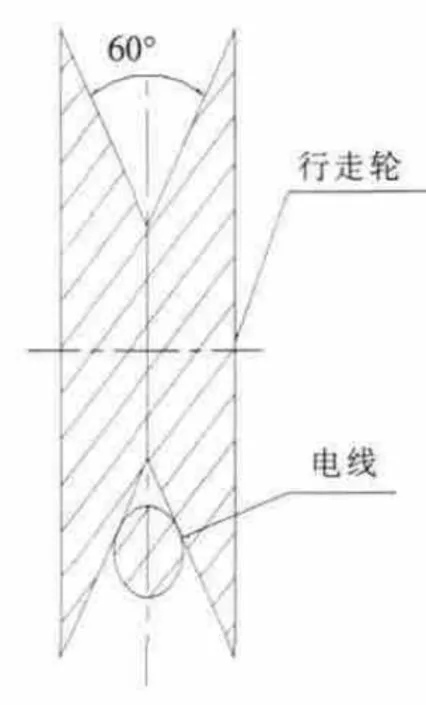
图3 行走轮Fig.3 Wheel
2.2 开合掌机构的设计
开合掌机构为连杆与丝杠的组合机构,通过丝杠控制连杆机构运动,从而使行走轮开合、升降。当前方有障碍物时,两个开合掌机构固定不动,另一个开合掌机构作为工作机构,通过工作的开合掌机构的张开使一对行走轮之间产生一定角度,并向上抬升。当工作的开合掌机构顺利通过障碍物后,需要对线路重新定位,定位成功后缓慢将工作的开合掌机构的移动副下移,使工作的开合掌机构的轮子与线路重新夹紧,从而顺利通过电线上的障碍物,继续移动行走。
如图4 所示为开合掌机构闭合和开合两种状态图。开合掌机构能够在闭合状态下通过压线管与防震锤,在开合状态时通过悬垂线夹。设BC 两点间的距离为l1,AB 两点间的距离为l2,BF 两点间的距离为l3,FG 两点间的距离为l4。
开口度是衡量该机构越障能力的指标,设开口度为op,可得:
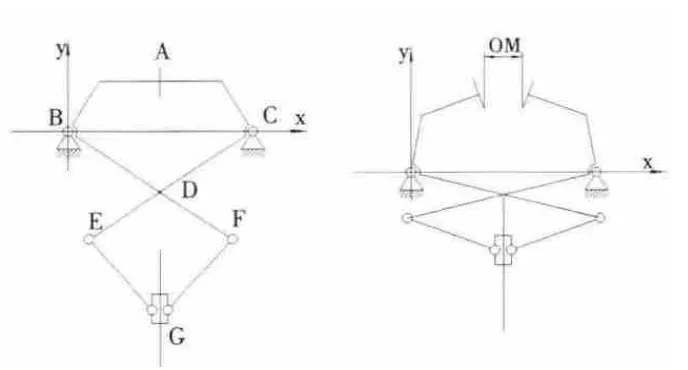
图4 开合掌机构Fig.4 Link and screw structure
op 取值范围为(0,1),设a边与x 轴的初始夹角为θ,变化量为△θ,则行走轮半径r 和开合过程中行走轮相对竖直线角度的变化也为△θ,设行走轮中心开合距离为om',可得:
om'=om+2rsin△θ
行走轮中心的竖直位移为:
Sy=l2sin(θ+△θ)-l2sinθ
水平位移为:
Sx=0.5l1-l2cos(θ+△θ)
故行走轮中心的合位移为:
当行走轮的直径相对l1、l2较小时,行走轮可以看做一个质点,开合掌机构在开合状态下,行走轮可通过障碍物的半径即为S。设AB 边与BF 边的夹角为β,BF边与FG 边交点的上升距离为H1,可得:
H1=l3sin(β-θ-△θ)-l3sin(β-θ)
设FG 边与y 轴的初始角度为γ,变化角度为△γ;丝杠节点与F 点间上升距离为H2,得:
H2=l4cosγ-l4cos(γ+△γ)
故丝杠总的上升高度为:
Hmin=H1+H2=l3sin(β-θ-△θ)-l3sin(β-θ)+l4cosγ-l4cos(γ+△γ)
开合掌机构在通过悬垂线夹时,需要使行走轮底部与D 点距离大于障碍物的距离,设该距离为L,可得:
L=l2sinθ+0.5l1tan(β-θ)-r
经过计算后,得到了机器人相关参数。
2.3 滑台机构的设计
滑台机构,其主体为一个可以移动的控制箱,用于存放电源、控制器件、检测设备等。控制箱可由滑轨来调整其位置,在机器人通过障碍物与爬坡时会适当地向前或向后运动,从而调整机器人的质心,使机械本体保持稳定。
本文用一个额外的驱动来控制滑台机构移动,采用了挠性传动的方式提供过载保护,使用双绕线,完成对重物的拖动,其结构如图5 所示。
图5 滑台机构Fig.5 Centroid moving structrue
3 三维建模分析
在完成机构设计与参数计算后,本文在Pro/E 中对机械结构进行三维造型,建立了线上障碍物模型,并且将机器人与线上障碍物模型一同导入ADAMS 中进行仿真设计。在ADAMS 中虚拟仿真的主要目的是测试小车是否能顺利通过线上的三种障碍物,并且在斜坡上行走。
3.1 开合掌机构仿真
本文在ADAMS 中建立了开合掌机构的模型,并且对其进行了仿真处理。本文建立了测量点到点类型的测量变量,测定前文所述L 的距离,以验证开合掌机构张开时能否通过悬垂线夹。
从图7 可以得知: 当该机构不开合时,允许通过190mm 的障碍物,当考虑到障碍实际尺寸时可能会略微减小;随着开合的进行,其值逐渐减小,开合掌机构运动到极限时,最小距离时为123mm 左右,大于悬垂线夹的直径,故机构设计合理。
本文又测试了丝杠驱动端的驱动力矩,以此选取了电机,丝杆驱动力矩如图8 所示。
图6 开合掌机构Fig.6 Opening and closing structure in ADAMS
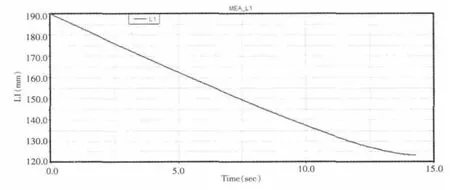
图7 距离曲线Fig.7 Distance curve
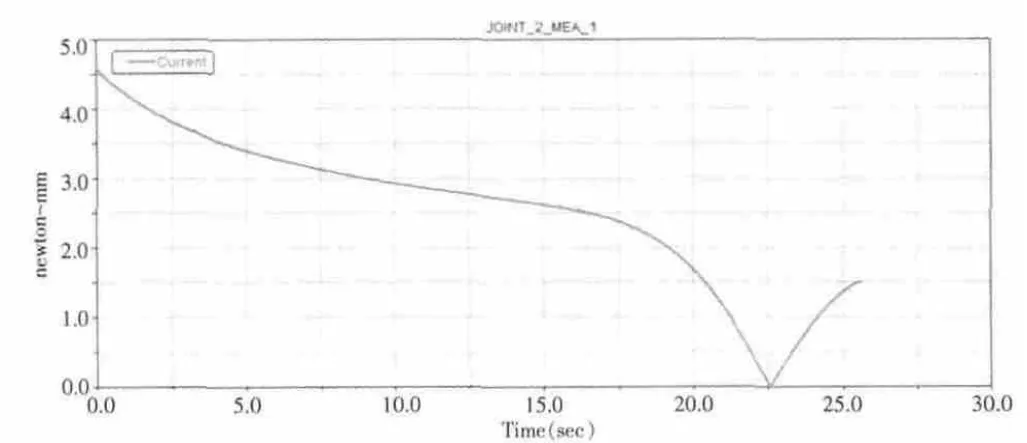
图8 丝杠力矩曲线Fig.8 Torque curve of screw
3.2 通过障碍物仿真
本文先在ADAMS 中测试了机器人能否在开合掌机构的闭合状态下,通过压线管与防震锤。在完成测试后,本文在ADAMS 中重点对机构通过悬垂线夹进行了虚拟仿真。仿真结果表明,在经过悬垂线夹时,机器人可以保持两臂不动,剩下的一臂通过调整开合掌机构的张开状态,改变两个行走轮之间的距离与角度,从而顺利通过悬垂线夹。

图9 机器人通过压线管Fig.9 Moving across connection pipe

图10 通过悬垂线夹Fig.10 Moving across suspension clamp
最后,本文在ADAMS中验证了线上避障行走机器人能爬上坡度为15°的高压线。
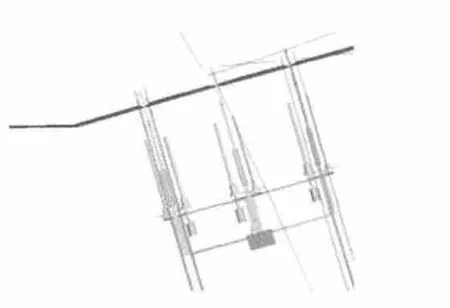
图11 机器人在斜坡行进Fig.11 Moving on the slope
4 结束语
本文设计了一种高压线巡检机器人,对机器人的机械结构设计过程进行了阐述,建立了机器人的三维模型,并在ADAMS中对其进行了仿真设计。本文在ADAMS 中对机器人进行了测试,结果表明机器人不仅能够稳定地通过线上的障碍物,而且可以爬上15°的斜坡。实物如图12 所示,对加工出的经行测试表明,本文设计的机器人满足设计要求,具有控制方便、行进稳定、机构可靠等特点。

图12 实物图Fig.12 The robot
[1] 孙翠莲,王洪光,赵明扬,等.超高压线巡检机器人移动越障机构综述[J].机械设计与制造,2006,10.
[2] 张廷羽.高压线巡检机器人动力学建模及分析[J].系统仿真学报,2008,18.
[3] 张廷羽.高压线巡检机器人的研究[D].上海:上海大学,2008.
[4] 任志斌.高压输电线巡检机器人控制系统的研究与实现[D].上海:上海大学,2009.
[5] 杜娥.基于ADAMS 的巡检机器人运动学、动力学仿真[D].武汉:武汉大学,2005.
[6] 孔志增.输电线路巡检机器人系统及控制软件研究[D].北京:华北电力大学,2008.
[7] Alisson Fonseca,Ricardo Abdo,João Alberto. Robot for Inspection of Transmission Lines[C]. IEEE International Conference on Applied Robotics for the Power Industry,2012.
[8] S.Peungsungwal.B.Pungsiri.Autonomous Robot For A Powr Transmission Line Inspection[J].IEEE,2001.
[9] Jaka Katrasnik,Franjo Pernus,Bostjan Likar.New Robot for Power Line Inspection[J].IEEE,2008.
