多头数控涂胶机的设计
2015-01-21常城
常 城
(北京信息科技大学 机电工程学院,北京 100192)
0 引言
当今社会,移动通讯迅猛发展,手机已经成为人们现代生活必需的通讯工具。有资料显示,全国手机持有量已经超过11 亿部,而且这个数字还在不断刷新。手机除了基本的通话功能之外,现在的智能手机还拥有了多媒体播放、高速网络浏览、照相等功能,满足人们的多种娱乐需求,大大的丰富了人们的生活。各大厂商也在努力提高手机的质量和性能,使手机拥有了更轻巧的机身、更多的用户体验、更丰富实用的功能。比如现在的手机要求有悦耳的铃声,播放MP3 音乐时还要能听到动听的音乐。但在手机内部芯片上安装的扬声器发出的声音要么变音,要么音质尖锐,不能满足这样的要求。为了实现此功能,有些厂商用一个小的共鸣箱壳体将扬声器密封在手机内部,通过共鸣箱对声音的处理,使手机发出的铃声或音乐更加悦耳和动听。
共鸣箱壳体和手机壳体之间要严格密封,以防出现杂音。所以,在共鸣箱壳体边缘处要涂上一层密封胶。现在涂胶的方法主要是工人手工操作,但点胶质量不稳定、效率很低、尤其劳动力成本很高,降低了企业效益。针对这样的问题,我们设计制造了多头数控涂胶机,很好的解决了上述问题。
1 多头数控涂胶机总体设计
1.1 多头数控涂胶机应满足的基本要求
多头数控涂胶机用于手机共鸣箱壳体边缘处涂胶生产,见图1 所示。主要应满足: ①多头数控涂胶机的精度要求不是很高,能按照手机共鸣箱壳体边缘曲线,出胶针头自动移动相应的轨迹,且在移动过程中控制出胶,并保证出胶量均匀;②可以同时对多个共鸣箱壳体涂胶,以提高生产效率;③应具有较高的使用寿命和较低的制造成本;④造型应简洁明快、美观大方、使用方便可靠。
1.2 多头数控涂胶机总体方案设计
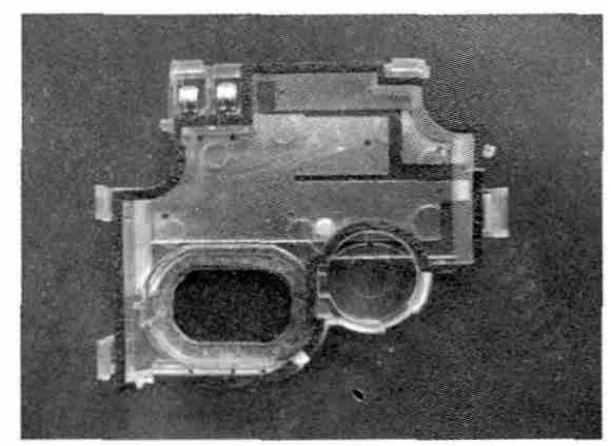
图1 共鸣箱壳体及黑色密封胶
在充分调研的基础上,我们拟定了几个方案。并从工艺分析、主要参数、总体布局、传动系统、数控系统、电气系统以及技术经济等方面进行了分析、论证。最后统一了认识,确定了最终的方案。
(1)多头数控涂胶机的总体布局设计。总体布局设计就是指各部件间的相对运动和相对位置关系,并使涂胶机具有协调优美的造型。合理的确定涂胶机总体布局,可以使涂胶机满足基本要求,还可以使机械结构更加简单、合理、经济、耐用。
在总体布局设计上,我们力求结构简单、操作方便、胶头运动更加直观、结构刚度高以及动态性能好等。因此我们采用了龙门数控机床的布局,如图2 所示多头涂胶机的整体结构。数控系统采用三轴联动的铣床数控系统。
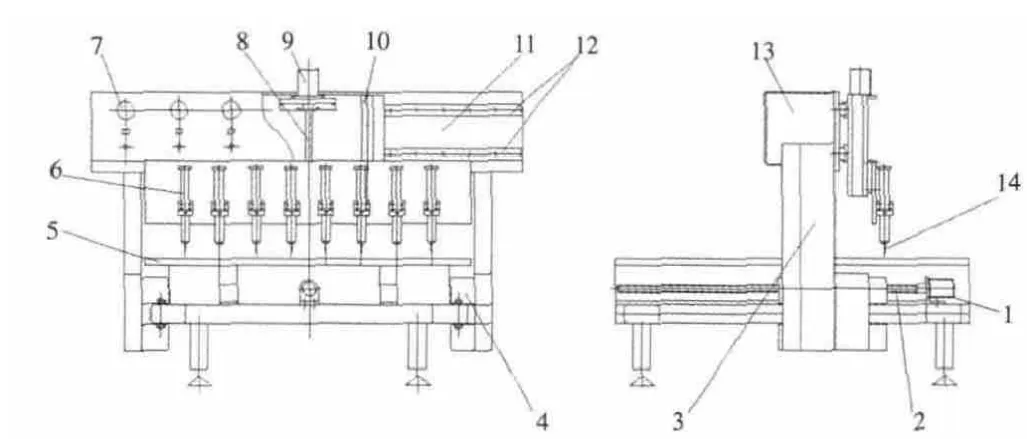
图2 多头涂胶机的整体结构
(2)出胶方案设计。胶筒类似于一个注射器,前端接有出胶针头,胶筒中的活塞运动可以将液体胶通过针头挤出。而胶筒中活塞可以由压缩气体推动,用简单的气动系统实现,原理图如图3。可以利用数控系统中控制切削液的指令M08(切削液开)和M09 (切削液关)来控制气动系统中电磁阀的工作,调压阀可以调节气体压力,气压表可以显示压力的大小。
(3)数控涂胶机主要技术参数的确定。数控涂胶机主要技术参数包括尺寸参数、运动参数和动力参数等。①尺寸参数: 尺寸参数是影响涂胶机性能和结构尺寸的主要参数。设计时力求结构紧凑、小巧,确定整体尺寸为(1000×800×600)mm,占地小,可以充分利用生产面积;②运动参数: 运动参数是指执行件 (出胶头) 成形运动的速度。考虑到涂胶机只要求出胶头运动出共鸣箱壳体边缘曲线轨迹即可,且在运动过程中,几乎不用考虑任何外力作用,所以采用直流步进电机作为执行装置,并分别与X、Y、Z 向滚珠丝杠直连,以减少传动误差,缩短传动链;③动力参数: 主要指电动机功率及扭矩等参数。X、Y、Z 三个进给方向分别采用独立的步进电机驱动,且无需考虑外载荷,选择电动机功率及扭矩时,只需计算空载功率即可。

图3 出胶气动系统原理图
2 数控涂胶机的数控系统与伺服系统的选择
数控系统是数控装置实现自动生产的核心,主要由操作系统、主控制系统、可编程控制器、各类I/O 接口等组成。数控涂胶机的整体结构类似于龙门铣床,涂胶生产时,用出胶针头代替刀具,实现二维的运动轨迹即可。依据这样的要求,我们选用了三轴联动的国产铣床数控系统。该系统可控三个坐标轴: X、Y、Z。三轴直线插补、二轴圆弧插补,编程更方便;中英文显示界面;参数编程功能,可满足特殊需求等。满足我们作为数控涂胶机的数控系统的要求,且价格较合理。
通过计算和分析,伺服系统选择了两相混合式步进电机及步进驱动器。步进电机具有较好的定位精度,无漂移和累计定位误差,能跟踪一定频率范围的脉冲列。步进电机伺服系统没有反馈检测环节,是典型的开环控制系统,既满足了伺服控制的需要,也满足了降低成本的要求。步进电机的运行性能不仅与电机本身特性、负载有关,而且与其配套使用的驱动电源有着密切的关系。步进电机的运行性能是步进电机和驱动电源的综合结果,选择性能良好的驱动电源对于发挥步进电机的性能是十分重要的。
3 多头数控涂胶机机械结构设计
3.1 多头数控涂胶机本体的设计
多头数控涂胶机主要用于涂胶生产,在加工过程中没有或很小的运动阻力,本体对刚度和强度的要求并不是很高。因此涂胶机的本体采用工业铝型材搭建而成,包括工作台、立柱、横梁等,都选用不同类型和规格的工业铝型材组装,见图4。
工业铝型材具有很高的精度,如在5700mm 范围内,铝型材的交线及槽线的平行度不大于±0.05mm,在300mm 长度内直线度不大于±0.3mm,在2000mm 长度内直线度不超过±1.5mm,在2000mm 长度内扭曲度最大为1.5mm。工业铝型材表面经过氧化后,外观非常漂亮,且耐脏,一旦涂上油污非常容易清洗。组装成产品时,根据不同的承重采用不同规格的型材,并采用配套铝型材配件,不需要焊接,较环保,而且安装、拆卸,轻巧便于携带、搬移极为方便。
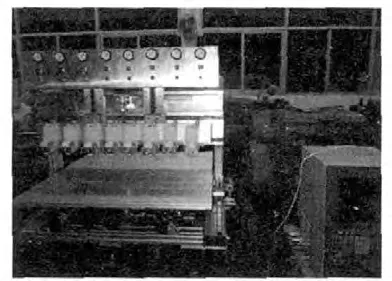
图4 多头数控涂胶机整机实物
3.2 传动零部件的设计与选择
涂胶机的传动系统是将伺服电机的旋转运动变为工作台直线运动的整个机械传动链,主要包括丝杠、导轨等零部件。为保证数控装置的传动精度和工作平稳性,零部件应具有较高的传动精度、较快的响应速度、较高的传动刚度、较小的摩擦力,以及较高的稳定性、寿命长、使用维护方便等要求。
丝杠选用了滚珠丝杠螺母副。它具有传动效率高、运动平稳无爬行、无轴向间隙、使用寿命长以及维护方便等特点。
导轨选用了直线滚动导轨。它除了导向外还能承受颠覆力矩,其制造精度高,可高速运行,并能长时间保持精度,通过预加负载可提高刚性,具有自调的能力,安装基面允许误差大,维护方便简单,寿命长等特点。
4 结束语
多头数控涂胶机是集机、电、气动和数字控制为一体的高新技术产品。现该机已用于生产,大大的提高了共鸣箱壳体密封胶的涂胶效率、质量和稳定性,大大减少了操作工人数量,节约了人工成本。数控涂胶机还可以广泛用于其他轻工等行业的涂胶或点胶自动化生产。
[1] 杨黎明,等. 机械设计简明手册[M]. 北京:国防工业出版社,2008.
[2] 邓则名,程良伦,谢光汗. 电器与可编程控制器应用技术[M]. 北京:机械工业出版社,2008.
[3] 韩秋实. 机械制造技术基础[M]. 北京:机械工业出版社,2005.
[4] 林文坡. 气动传动及控制[M]. 陕西:西安交通大学出版社,1992.
[5] 王孝华,等. 气动元件及系统的使用与维修[M]. 北京:机械工业出版社,1996.
[6] 陆鑫盛. 气动元件[M]. 北京:机械工业出版社,1991.
[7] 孙志永,等. 数控与电控技术[M]. 北京:机械工业出版社,2002.
