基于DSP的太阳能双轴跟踪控制系统的设计
2015-01-21张国新
张国新,杨 勇
(中国煤炭科工集团 太原研究院,山西 太原 030006)
0 引言
太阳能是用之不竭的可再生能源,采用太阳能发电可以避免对煤炭、石油、天然气等不可再生能源的依赖,因此太阳能发电是解决当前能源危机的重要途径之一,受到全世界的普遍重视并得到迅速发展[1]。据国际能源署预测,太阳能热发电技术被认为是未来发电成本有望接近化石燃料发电的技术,更具良好的发展前景。本文以TMS320F2812DSP 为控制核心,采用视日运动轨迹和光电混合跟踪两者混合的方式,控制两台步进电机,来调整集热器的高度角和方位角,来对太阳进行双轴跟踪。相关理论分析表明,相同条件下,对太阳进行双轴跟踪比采用固定跟踪方式能量接收率提高37.4%,从而大大提高发电量,降低成本,拓宽太阳能的利用领域[2]。
1 双轴跟踪控制系统的设计
1.1 太阳跟踪方式的确定
跟踪系统按照不同的标准有不同的分法,按太阳入射光线和反射镜主光轴的位置关系可分为单轴跟踪和双轴跟踪;根据跟踪方法的不同也可以分为光电跟踪、视日运动轨迹跟踪(程序跟踪)和两者混合跟踪。
单轴跟踪只是在方位角跟踪太阳,而在高度角作季节性调整。双轴跟踪是在方位角和高度角两个方向跟踪太阳轨迹。因此,双轴跟踪的效果优于单轴跟踪。光电跟踪装置大多使用光敏传感器,传感器的按照靠近遮光板,调整遮光板的位置使遮光板对准太阳、传感器处于阴影区,当太阳移动时,传感器受到日光直射输出一定值的微电流,作为偏差信号,经放大电路放大,由伺服机构调整角度是跟踪装置对准太阳完成跟踪。光电跟踪优点是灵敏度高,缺点是受天气影响大,阴雨天时无法对准太阳,甚至引起执行机构的误动作[3]。视日运动轨迹跟踪(程序跟踪)是根据太阳的实际运行轨迹,按预定的程序调整跟踪装置跟踪太阳。这种跟踪方式能够全天候实时跟踪,缺点是存在积累误差并且自身不能消除[4]。混合跟踪结合了两者的优点并克服了两者的缺点,是跟踪达到最佳效果[5]。因此,本次设计使用双轴跟踪与混合跟踪的控制方式。这种控制方式在实际应用中采用较多,国外太阳跟踪装置的精度最高已经达到0.01°[6]。
1.2 跟踪系统的组成
采用两级混合跟踪方法。第一级采用程序按视日运动轨迹控制跟踪,第二级采用传感器校正跟踪。跟踪系统由传感器、DSP 控制器、执行机构和集热器以及固定连接机构组成。跟踪系统的组成如图1 所示。
1.3 视日运动轨迹跟踪设计
太阳每天东升西落,站在地球表面的人能够观测到太阳有规律地运动。视日运动轨迹跟踪就是利用到太阳有规律地运动,利用DSP 控制单元根据相应的公式和参数,计算出白天太阳的实时位置,在转化为相应的脉冲发送给步进电机,以达到对太阳进行实时跟踪的目的。
地球围绕太阳公转的平面称为黄道面,地球自转的平面称为赤道面,两者之间形成的夹角称为赤纬角,用δ 表示。赤纬角每年随阴历阳历的节气而变化,在春分和秋分两天,赤纬角δ=0°,太阳光正午直射赤道,地球南北半球昼夜时间相等;夏至时,太阳光正午直射北回归线,δ=23.44°;北半球昼长夜短达最大值,北极部分区域为全白昼;冬至时,太阳光正午直射南回归线,δ=-23.44°,南半球昼长夜短达最大值,南极部分区域为全白昼。地球赤纬角的近似表达式为[7]

式中,δ—太阳赤纬角,0°角位置点在每日正午,-23.44°≤δ≤23.44°;n—一年中的第n 天,一月一日时n=1。该公式在太阳能热发电计算中精确度是足够的,全年误差平均值为1.71%;在春分δ=0°点计算值相对误差为1.72%,夏至时基本无误差;秋分点δ=0°计算值误差为4.3%,冬至的极值点误差为0.02%。
根据地平坐标系的计算方法,在地球任意一点位置处,要确定太阳的位置,只要确定太阳的高度角和方位角,太阳和地球之间的相对位置就确定了。太阳高度角定义为地球任意一点位置和太阳的连线与水平面投影线之间的夹角,用αs表示,以地平圈向天顶方向为正,地平圈以下为负。太阳高度角计算表达式为[7]

式中,αs—太阳高度角;φ—地理纬度 (-90°≤φ≤90°);δ—太阳赤纬角 (-23.45°≤φ≤23.45°);ω—太阳时角,因为地球每24h 自转1 圈,所以每15°为1h;且正午时ω=0°,上午时ω>0°,下午时ω<0°,则ω 可由下式计算得到:

式中: t—北京时间 (h)。
现实中由于太阳在一年中的时角运动很复杂,日常生活中的钟表时间采用平均太阳时t(简称平太阳时),即太阳沿着周年运动的平均速率。真太阳时t0与平太阳时之差即称为时差,在工程计算中就会存在时差问题。因此,必须采用真太阳时,以达到实际计算中的精度要求。为了得到准确的真太阳时,可以根据定时标准来校正时差值,我国区域的时差e 确定如下[8]:
式中,Lloc—当地经度。这样,太阳时角ω 为:

太阳方位角定义为地球任意一点位置处和太阳的连线在水平面投影线与正南方向的夹角,用γS表示,以正南方向向东为负,向西为正,太阳方位角计算表达式为:

为了精确跟踪太阳的位置,除了要计算出太阳的实时位置之外,还需要知道具体某天的日出时角ω1和日落时角ω2。由于日出日落时,太阳高度角αs=0°,由式(2)得:

又由于上午时ω>0°,下午时ω<0°,可得到日出和日落时角的表达式为:

再根据式(6)可以得到日出时间T1和日落时间T2为:

1.4 光电传感器跟踪设计
双轴跟踪控制系统的光电传感器的俯视图如图2 所示。其中4 个光电传感器A、B、C、D 封装在集热器底部的上下左右四个方位,集热器底部距离顶部有一定的高度可遮挡斜射进来的阳光,图中阴影部分为太阳光直射的区域,当阳光没有全部射到集热器上的阴影区域时,A、B、C、D四个传感器中的一个或几个会被阳光照射而产生偏差信号,从而控制步进电机来对集热器的位置进行调整[9]。
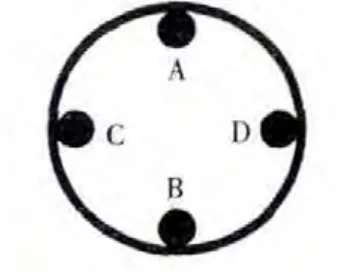
图2 光电传感器俯视图Fig.2 The vertical view of photoelectric sensor
1.5 控制系统的电路设计
太阳能双轴跟踪控制系统采用TMS320F2812 数字信号处理器(DSP)作为核心控制器。它集成了事件管理器、A/D 转换模块、SCI 通信接口、SPI 外设接口、e-CAN 总线通信模块、看门狗电路、通用数字I/O 口、多通道缓冲接口、外部中断接口等多种功能模块,具有精度高、速度快、集成度高等特点。由于太阳能双轴跟踪控制系统需要对太阳的高度角和方位角做大量的运算,同事也需要对太阳进行实时、准确的跟踪,所以本次设计采用TMS320F2812DSP 作为控制器。
本次设计的太阳能双轴跟踪控制系统要求DSP 在运算时要与实际时间同步,这样才能准确的判断太阳的高度角与方位角,所以需要在DSP 控制器上加一个实时时钟芯片,以保证控制器的系统时间与实际时间完全一致。本次设计选用了实时时钟芯片X1226,图3 所示为实时时钟的硬件原理图,其具有时钟和日历的功能,时钟通过时、分、秒寄存器来跟踪,日历通过日期、星期、月和年寄存器来跟踪,并具有自动闰年修正功能,拥有强大的双报警功能,精度可到1s,晶振选用32.768kHz。X1226 的存储器属于SRAM 结构,因此必须要配有电池,以保证时间信息不丢失[10]。
传感器的检测电路如图4 所示,光电二极管A 和B检测太阳高度,光电二极管C 和D检测太阳的方位。当太阳光垂直照射到集热器表面时,A 和B 接受的太阳辐射强度相同,经比较器后输出信号为零;当太阳光偏离集热器主轴时,A 和B 接受的太阳辐射强度不同,经比较器后输出偏差信号,经模数转换成数字信号,根据偏差信号的正负和大小决定执行机构的转向和转动角度。信号差除以最小分辨率就得到步进电机需要运行的步数。
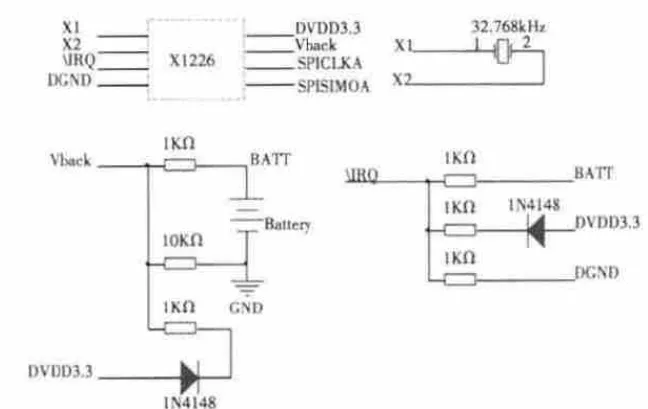
图3 实时时钟的硬件原理图Fig.3 Principle diagram of real-time clock hardware
2 系统软件设计
太阳能双轴跟踪控制系统采用的控制器为数字信号处理器(DSP),DSP 主要完成的任务是控制步进电机脉冲信号的产生和分配,包括: 计算太阳运行轨迹及太阳角度差,发出一级调整信号;计算处理传感器偏差信号,发出二级校正信号。DSP 使用的编程语言为C 语言,根据上述跟踪原理及参数的计算算法,具体过程如下: 首先DSP 通过读取系统时间及当地的经纬度计算出当天的赤纬角、日出时间、日落时间。然后将日出和日落时间与系统时间进行比较,判断出此时太阳的状态,如果还没有日出,则继续等待;如果已经日落,则结束本次控制;如果在日出与日落之间,则开始对太阳进行跟踪。跟踪过程分为一级跟踪和二级跟踪,首先需要DSP 计算出此时的方位角和高度角,通过运算转化为所需要的脉冲来对太阳进行一级跟踪,然后传感器系统开始检测集热器与太阳光的偏差,通过计算转化成相应的脉冲来控制集热器完成二级跟踪。控制系统程序流程图如图5所示。
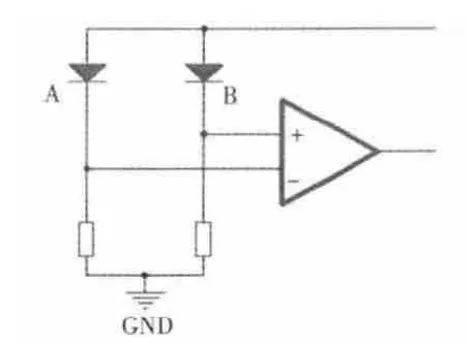
图4 传感器检测电路图Fig.4 Sensor detection circuit
3 结束语
本文介绍了一种太阳能双轴跟踪控制系统,该系统采用一级视日运动轨迹 (程序控制) 跟踪和二级传感器校正跟踪结合的控制方式对太阳进行全天候实时跟踪,从而提高了发电效率。系统以TMS320F2812DSP 作为核心控制器,通过理论计算出太阳的实时位置并转化为脉冲来驱动跟踪装置跟踪太阳完成一级跟踪,再通过传感器校正发出的
偏差信号来校正跟踪装置完成二级跟踪,该自动控制系统的准确性高,可靠性强,即使在天气变化复杂的情况下也能正常工作,有利于提高太阳能的利用效率。
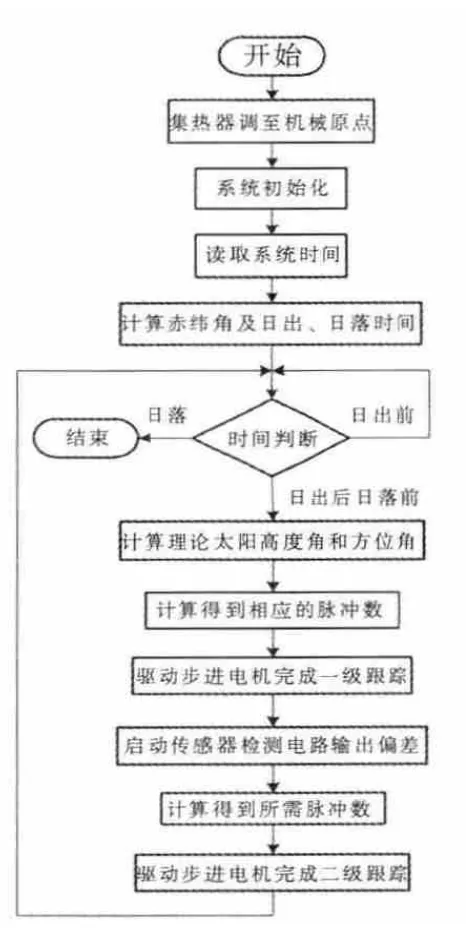
图5 控制系统程序流程图Fig.5 Program flowchart of the control system
[1] 纪军,何雅玲.太阳能热发电系统基础理论与关键技术战略研究[J].中国科学基金,2009,6.
[2] 秦兴盛,陈晓荣,聂道林.基于STM32 的太阳能双轴跟踪控制系统[J].信息技术,2013,4.
[3] 郑小年,黄巧燕.太阳跟踪方法及应用能源技术[J].2003,4.
[4] 陈维,等.太阳能利用中的跟踪控制方式的研究[J].能源工程,2003,3.
[5] Roth P,Georgiev A,Boudinov H.Design and construction of a system for sun-tracking.In:Renewable Energy,v29,n 3,March,2004.
[6] 王尚文.双轴跟踪碟式太阳能集热器的研究[D].华中科技大学,2007.
[7] 王炳忠,等.几种太阳位置计算方法的比较研究[J].太阳能学报,2001,4.
[8] 黄湘,王志峰,等.太阳能热发电技术[M].中国电力出版社,2013.
[9] 黄素逸,等.太阳能热发电原理及技术[M].中国电力出版社,2012.
[10] 顾卫钢.手把手教你学DSP[M].北京航空航天大学出版社,2011.
