CAD技术在四连杆机构分析与设计中的应用
2015-01-21姚芳
姚芳
(滁州职业技术学院汽车工程系,安徽 滁州239000)
CAD技术在产品设计过程中的优势越来越明显,本文以四连杆机构为对象,讲述其应用。首先对四连杆机构进行运动学分析,得到未知运动变量关于杆长参数及输入变量的关系。然后,以VBA为二次开发的编程接口,进行Solid Works参数化机构建模及运动仿真设计;进一步地,利用MATLAB对机构位置变量进行周期内连续跟踪,以图线形式显示,据此,观察变化趋势及幅值看是否满足设计要求,并结合图线的物理意义,求解机构参数,如极位夹角、最小传动角等;借助Solid Works/Solid Works Motion的运动仿真功能,建立四连杆仿真模型并设置仿真参数进行运动学分析,得到杆件的运动参数随驱动杆参数一周期变化的关系,并与通过MATLAB精确计算的结果对比,以此说明二者的特点及优选仿真方法。
一、四杆机构的运动学分析
如图1,四杆机构杆矢量构成封闭矢量多边形,即ABCDA,其各矢量之和必等于零。即

(一)位置分析
将式(1)矢量方程向两坐标轴投影,并改写成方程左边仅含未知量项的形式,即得

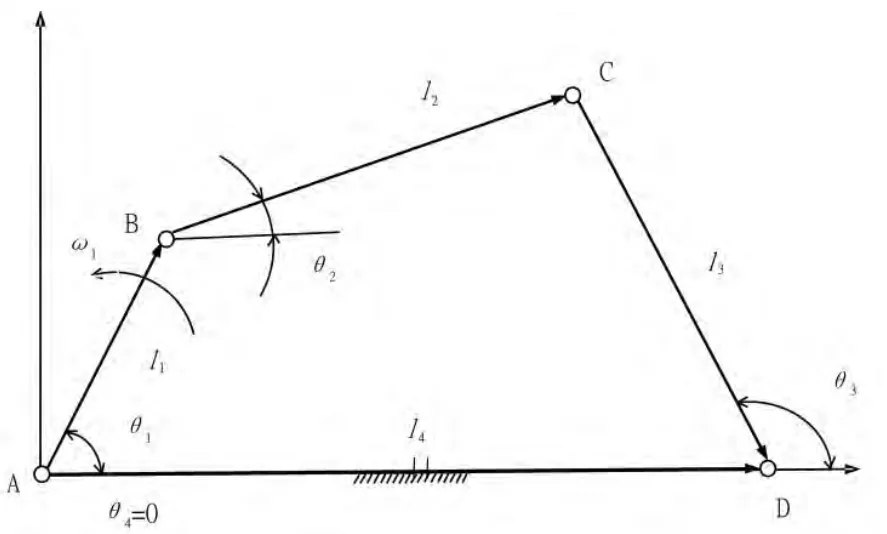
图1 四杆机构封闭矢量图
整理得三角函数方程

其中

解得

(二) 速度、加速度分析
将式(2)对时间取一阶导、二阶导,并经适当运算、整理,得


式(5)为角速度分析结果,式(6)为角加速度分析结果。
二、Solid Works 软件下基于VBA 的的四连杆运动图解辅助设计
Solid Works是一款方便实用的三维造型软件,且对装配体设置机架和驱动后,可进行实际运动过程的动画模拟,鉴于此,在传统的图解法设计四连杆机构阶段及设计完成后,辅以适当的运动动画,可更直观地展示各零(部)件间的相对运动情况,及早发现设计缺陷。
VB是当今最通用的编程语言之一,其面象对象编程的特点,对于非计算机专业人员来说,简单易用,便于掌握。Solid Works软件提供了VBA(Visual Basic for Applications)编程接口,利用它,可以通过宏操作,完成对机构建模到动画仿真过程的记录,记录成VB语言,可再现前述过程,并提供参数化的接口(记录在VBA的变量),据此,用VB对此过程进行二次开发,扩展出参数输入窗口,以适应机构参数的变化。图2是该设计的总体流程。
三、MATLAB 辅助机构参数求解
由前面四杆机构位置分析,知给定各杆杆长及主动杆l1的方位角θ1,便唯一确定四杆机构位形(仅考虑一种机构初始安装位置),当方位角θ1从起始位置匀速、连续变化一周期时,杆l2及杆l3的方位角θ2、θ3也将在对应周期内连续变化,如以θ1为自变量(一定程度等效于时间),可得到因变量θ2或θ3的变化规律。
对于曲柄摇杆机构,取l1《30,l2《110,l3《80,l4《120,θ1在[0,360°]内每隔0.1°连续均匀变化,利用MATLAB软件绘制可绘制上述变化规律,分别如图3(a)、图3(b)所示。该变化规律可辅助连杆运动分析和检验。
分析θ2(或θ3)的变化,知其极大值、极小值对应机构从动件的近极限、远极限位置(相对于主动杆l1),对应的θ1分别记为θ1d、θ1x,则极位夹角θ 为

据此,通过编制的MATLAB程序获取图3(a)(或图3(b))中极大值、极小值处的值,按(8)式可得到极位夹角为9.48°。
另外,机构的传动角γ 定义为压力角的余角,参照图1,根据几何关系,还可表达为

这样,可做出传动角γ 关于主动杆l1一周期内的变化规律,如图4所示。

图4 传动角变化图线
通过获取图4所示图线的最小值,即得最小传动角=53.78°,满足约定的条件。
四、基于Solid Works / Solid Works Motion 模块的四连杆运动学分析
Cosmos Motion(Solid Works08版以后更名为Solid Works Motion)是为广大用户提供的实现虚似仿真的优秀工具。它是一个全功能运动仿真软件,与当今主流的三维CAD软件Solid Works无缝集成。
以前面曲柄摇杆机构为例,建立运动仿真模型,初始位置如图5所示,机架固定,各杆在两端铰接,铰接中心距离满足给定杆长条件。在曲柄处设置回转马达驱动其匀速转动,曲柄转速,逆时针方向。

图5 曲柄连杆机构仿真模型
在曲柄运动一周过程内,可选取该曲柄摇杆机构上任意点的进行轨迹跟踪,如选取曲柄与连杆转动中心点、连杆中心点及摇杆与连杆转动中心点,可得其在一周期内的运动轨迹,如图6所示,图中圆、腰形封闭线、弧线分别与所选点一一对应。

图6 曲柄连杆机构选取点运动轨迹
对机构各杆件进行运动学分析,在机构设计中也是必要的。连杆的角速度变化如图7所示,角加速度变化如图8所示。对于图7、图8,(a)图是利用Solid Works Motion仿真得到的曲线,(b)图是根据式(6)、(7)利用MATLAB精确计算得到的曲线。对比二者,图形走势及峰值基本一致,差别很小,可见Solid Works Motion的可靠性能够得到保证。相对来说,Solid Works Motion较MATLAB编程仿真易于掌握,具有良好的推广使用价值。

图7 连杆角速度分析
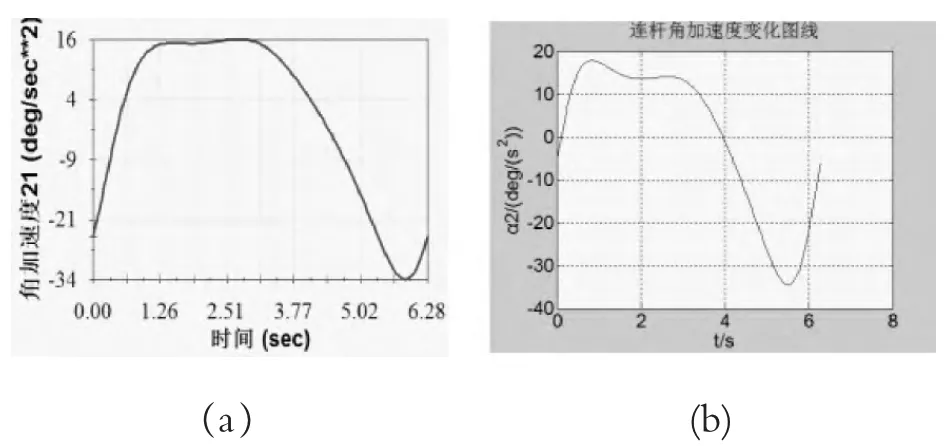
图8 连杆角加速度分析
五、总结
随着计算机技术的快速发展,CAD(计算机辅助设计)技术在产品设计、开发过程的辅助作用及表现出的优势越来越受到开发人员的重视。本文密切结合四连杆机构,特别是曲柄摇杆机构,讲述了CAD在其设计与校验过程中的应用。CAD技术的应用,较好地满足了设计的参数化、可视化及精确性要求。
[1]孙恒,陈作模.机械原理(第六版)[M].北京:高等教育出版社,2001.
[2]毕新胜,王磊,彭霞等.曲柄摇杆机构的计算仿真分析[J].农业技术与装备,2010,(06):11-13.
[3]黄康,黄国兴.平面连杆机构的计算机辅助设计[J].机械设计与制造,2003,12(06):11-13.
[4]高英敏,李莉,高运芳.平面连杆机构辅助设计与仿真[J].工程图学学报,2009,(04):42-48.
[5]卫江红.基于Solid Works 的连杆机构的运动分析与仿真[J].机械工程与自动化,2008,(01):77-81.
[6]江洪,陆利锋.Solid Works 动画演示与运动分析实例解析[M].北京:机械工业出版社,2006.
[7]陈怀琛.MATLAB 及其在理工课程中的应用指南[M].西安:西安电子科技大学出版社,2007.
