稀释水水力式流浆箱横幅定量控制执行器设计
2015-01-17董继先
王 博 汤 伟 董继先 王 樨 王 锋
(1.陕西科技大学轻工与能源学院,陕西西安,710021; 2.陕西农产品加工技术研究院,陕西西安,710021;3.陕西西微测控工程有限公司,陕西咸阳,712081;4.浙江力诺流体控制科技股份有限公司,浙江瑞安, 325200)
·流浆箱·
稀释水水力式流浆箱横幅定量控制执行器设计
王 博1,2汤 伟1,2董继先1,2王 樨2,3王 锋4
(1.陕西科技大学轻工与能源学院,陕西西安,710021; 2.陕西农产品加工技术研究院,陕西西安,710021;3.陕西西微测控工程有限公司,陕西咸阳,712081;4.浙江力诺流体控制科技股份有限公司,浙江瑞安, 325200)
针对国外稀释水水力式流浆箱的横幅定量控制执行器存在价格高,国内产品存在精度低、集成度不高等现状,研制了新型板式集成化控制器,使用单片机四路高速脉冲复用端口控制4台执行器的步进电机驱动器;针对步进电机存在的丢步、过冲现象研究了使用S形速度曲线处理阀门在加速和减速阶段的运动提高了阀门精度的方法;使用高精度电位器测量阀位反馈到模拟量复用端口进行采集处理,使用总线对阀门进行远程控制,控制器内的一块单片机能控制4台执行器,提高了控制器的集成度和实用性。
横幅定量;稀释水水力式流浆箱;S形速度曲线;执行器
(*E-mail: fixang@126.com)
稀释水水力式流浆箱是一种浓调式流浆箱,在流浆箱的横向安装了数量众多的横幅定量执行器,用来调节纸幅的横向定量分布(如图1所示),在生产线的卷取部之前,安装有定量扫描架,将横幅定量数据发送到横幅定量控制计算机上,计算机控制各执行器进行开大或关小调节,控制加入系统的白水量,进而调节横幅定量。与传统的唇板调节相比,该方法具有调节范围广、响应速度快的优点,更适合于高车速、大幅宽、高档纸的生产。最近几年我国引进的高端生产线多配置稀释水水力式流浆箱,然而由于引进国外产品耗资巨大,国内中小纸厂负担不起高昂的费用,国内造纸研究院所和浆纸装备制造企业因此对稀释水水力式流浆箱展开了技术研究,就流浆箱和横幅定量执行器的机械结构而言,相对较为固定,也取得了许多实用化的科技成果,其机械结构已不再是技术难题,但执行器的控制器属于一种高度集成、高精度的板级控制设备,对安装空间、稳定性、快速响应性要求极高,研制难度较大,尽管国内有厂家设计制作了横幅定量执行器及其控制器,但是其精度稳定性和国外产品还有差距[1-4],还具有改进空间。高精度执行器及其控制技术已经成为阻碍我国自主知识产权稀释水水力式流浆箱及横幅定量控制系统进展的技术障碍,因此研制高性价比的横幅定量控制执行器,对稀释水水力式流浆箱的国产化具有重要的意义。
1 横幅定量执行器的机械结构
横幅定量执行器机械结构平面及立体视图如图2所示。由图2可知,横幅定量执行器由执行器本体和阀体组成,其阀体通常采用DN20的精密V型调节球阀,设计驱动转矩为20 N·m。对于横幅定量控制而言,执行器的横向尺寸越小、横向排布越多,对应的控制区域越窄[5],横向定量控制精度越高,要求执行器(含阀体)的横向尺寸≤50 mm。流经阀芯的白水对阀门的冲击力和流浆箱的背压导致阀芯在静止时也受到流体的冲击力,驱动阀门的电机需要具有静态转矩保持能力,经济实用的电机有步进和伺服两大类,虽然伺服电机的定位精度高,但是工业批量生产的伺服电机最小宽度为60 mm,难以满足执行器对横向尺寸的要求,因此只能选择步进电机作为驱动元件,在横向尺寸约束下,选用42型的步进电机驱动,经过精密行星减速机减速增力,可以达到设计转矩。
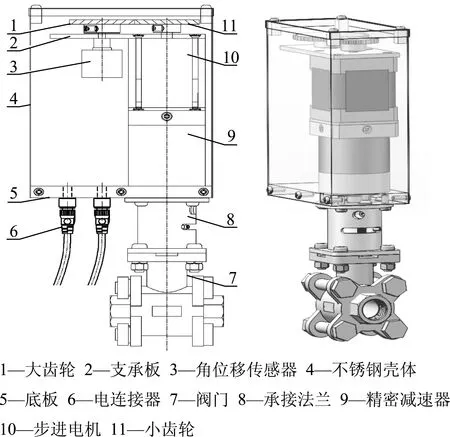
图2 执行器机械结构平面及立体视图
由图2还可知,双轴步进电机安装在执行器壳体内,步进电机尾部螺孔固定有支承板,支承板有两个孔,步进电机的尾轴从其中的一个孔中穿出,步进电机尾轴上安装有小齿轮,支承板的另一侧安装有角位移传感器,角位移传感器从孔中穿出,其轴上固定有大齿轮,两齿轮相互啮合传递角位移信号。步进电机的下端轴伸入精密行星减速机的空心锁母中锁紧,电机的法兰固定在减速机的法兰平台上,减速机的下法兰固定在底板上,减速机的轴从底板伸出,通过同步联轴器连接到阀体,承接法兰的两端分别连接执行器底板和阀体。控制线路板连接上位控制系统,通过总线传递控制信号[6],向步进电机发送AB相驱动电流,使电机按照预定的步长正转或反转,经过减速机增力后将角位移传递给阀体,调节阀门开度。
执行器安装在纸机的流浆箱上,属于湿部,其湿度和温度较高,有时还会遇到淋水的状况,工作条件较差,为了保证设备正常运行,改善电气环境,将控制器和执行器分开布置,控制线路板和步进驱动芯片统一布置在流浆箱横向密闭的不锈钢电气箱内。
2 控制器关键技术分析
横向执行器在流浆箱上数量众多,出于对产品成本考虑,执行器的控制不可能使用PLC实现,需要针对其功能开发其专用的控制线路板。控制器的主要功能有阀位反馈、步进电机驱动、通信控制等。其中驱动步进电机属于强电控制环节,使用专用的步进电机驱动芯片连接单片机的弱电信号控制步进电机按照预定的转角转动;单片机能够实现阀位反馈、搭配串行通信芯片能实现总线通信控制功能。
2.1 阀位反馈
横幅定量控制系统属于复杂的过程控制,每一个执行器对相邻若干个执行器的调节效果都有影响,控制系统需要根据每个执行器的绝对开度做出决策。阀位反馈功能通常由安装在步进电机尾部的高精度角位移传感器检测步进电机的转角,根据精密减速机传动比按比例换算出真实的阀门开度0~100%。通常,检测角位移的元件有光电编码器和精密电位计两种,光电编码器多为增量式[7],需要有固定的参考点确定绝对位置,每次通电后需要回到机械零位再累计阀门开度,掉电后阀位容易丢失,特别是在停电后对执行器进行了手动盘车,阀门开度发生了变化,控制系统没有检测到,下次通电开机后会导致控制系统对阀位的计量错误。另外,执行器在传动轴线上的空间紧凑,很难有空间安装光电感应开关做为零参考点,因此,使用光电编码器检测阀位在实践上也难以实现。虽然也有绝对式的光电编码器,但是其价格高昂,不利于产品的成本控制。精密电位计由精密的绕线电阻构成,中间抽头输出的电压与绝对转角成比例,输出电压信号接入微控制器的模拟量采集通道,能够检测绝对角位移,不受断电的影响,为了节省竖直方向上的长度空间,将电位计倒置安装在步进电机尾部的支承板上,通过齿轮啮合到步进电机尾部的齿轮,实现阀位反馈功能。

图3 控制器组成
2.2 步进电机驱动
执行器按照步的方式工作,每次运行一定的步长,步进电机属于一种强电驱动部件,单片机微控制器的弱电信号难以带动电机运转,因此步进电机往往配置专用的步进驱动器接在单片机上工作,横幅定量执行器对尺寸空间的要求极为苛刻,不允许有很大的空间布置步进电机驱动器,因此必须对步进驱动电路进行精简。步进电机驱动器的核心部件是步进驱动芯片,再搭配一些电阻、电容、稳压整流器和光电耦合器等组成,其中步进驱动芯片是核心部件,因此抽取其典型驱动芯片TB6560HQ[8]将步进驱动器精简成一块专用的线路板,完全实现步进电机的驱动功能。控制步进电机需要3个信号:方向、脱机、脉冲,其中方向信号决定步进电机的转动方向,脱机信号决定步进电机是否处于有力矩的状态,脉冲信号的数量决定步进电机转动的角度大小,脉冲信号的频率决定步进电机转动速度的快慢。当单片机将方向信号和脱机信号置于有效,并发出脉冲信号时,驱动步进电机正转;当单片机只将脱机信号置于有效,并发出脉冲信号时,驱动步进电机反转;当单片机将脱机信号置于有效时,步进电机处于力矩保持状态即静止;在需要手动采用机械方式盘车时,将脱机信号清除,则步进电机处于无力矩状态,可以使用手动盘车功能。
步进电机在整步运行时的步距角为1.8°,如果以整步模式运行,发送一个控制脉冲信号,电机将转动整步的角度,为了使执行器具有更高的执行精度,对步进驱动电路进行细分设定,若将驱动芯片设置成16细分,则步距角变成整步的1/16,发送一个控制脉冲电机的转角也减小相应的倍率,脉冲当量减小带来的一个有益效果是从全开到全关的可执行脉冲数增加,控制更加精细[9];另一个好处是采用细分有利于步进电机的驱动电流过渡更加平缓,有利于减小电机转动的冲击,减小步进电机的失步可能。以16细分、1∶50减速比、执行器从全开到全关执行时间为100 s计算,基准脉冲频率为400 Hz。脉冲频率较高,不是普通的脉冲信号,而是高速信号,产生合适的脉冲信号是本系统设计的难点,普通的51系列单片机属单线程处理、功能较单一,通常仅仅具有AD转换复用端口[10],高速脉冲信号只能通过定时器程序实现,进入定时器循环,其他任务会被挂起,直到脉冲结束,方能进入其他任务,这样做实时性就很差,因此脉冲产生必须是独立于控制程序之外的功能,不消耗微控制器主线程资源,针对这一需求,需要设计专用回路处理这一事件[11]。
3 控制系统设计
3.1 电气原理设计
虽然也有能够运行多线程的单片机,在单片机内运行一个嵌入式实时操作系统,如μC/OS[12],这一系统嵌入在单片机内运行,作为底层的操作系统,保证系统具有严格的实时性,操作系统内核约为2 kB左右,需要占用系统运行时间,系统运行循环周期最快也要以10 ms起,若依靠这一时钟产生脉冲,脉冲频率不高于50 Hz,难以满足使用要求。因此需要寻求更快的脉冲产生方式,STC12C5604AD是一种具有PWM复用端口和AD信号转换端口的单片机[13],则产生高速脉冲和模拟量信号转换属于系统内置功能,无需占用程序运行时间,将PWM功能设定为50%占空比,则为高速脉冲控制信号。模拟量的阀位信号送入单片机的AD通道进行处理,即可采集到绝对阀位值;控制器与上位机通过单片机的通信端口建立通信连接,实现远程控制,控制器各组件功能如图3所示。
STC12C5604AD单片机具有4路PWM复用端口和8路AD转换端口,4路PWM复用端口提供高速脉冲控制信号,阀位模拟量信号送入AD转换复用端口实现阀位测量,综合片上资源,一块单片机能够控制4台执行器运行,以1台执行器为例,其电气原理如图4所示,其他执行器的控制只需按照同功能的端口类推即可得到。其中Drive1为1#步进驱动板,驱动芯片型号为TB6560HQ,输入的控制信号有步进驱动器使能信号(EN)、方向信号(DI)、脉冲信号(PL)以及共阳端OPTO,其中EN、DI为常规低速信号,选用普通端口接入,PL为高速脉冲信号,使用单片机的PWM端口进行控制,步进驱动板输出AB相驱动电流至步进电机。使用精密电位计将阀位转换成模拟量电压送入单片机的模拟量输入端口ADC0进行AD转换,反馈阀位。
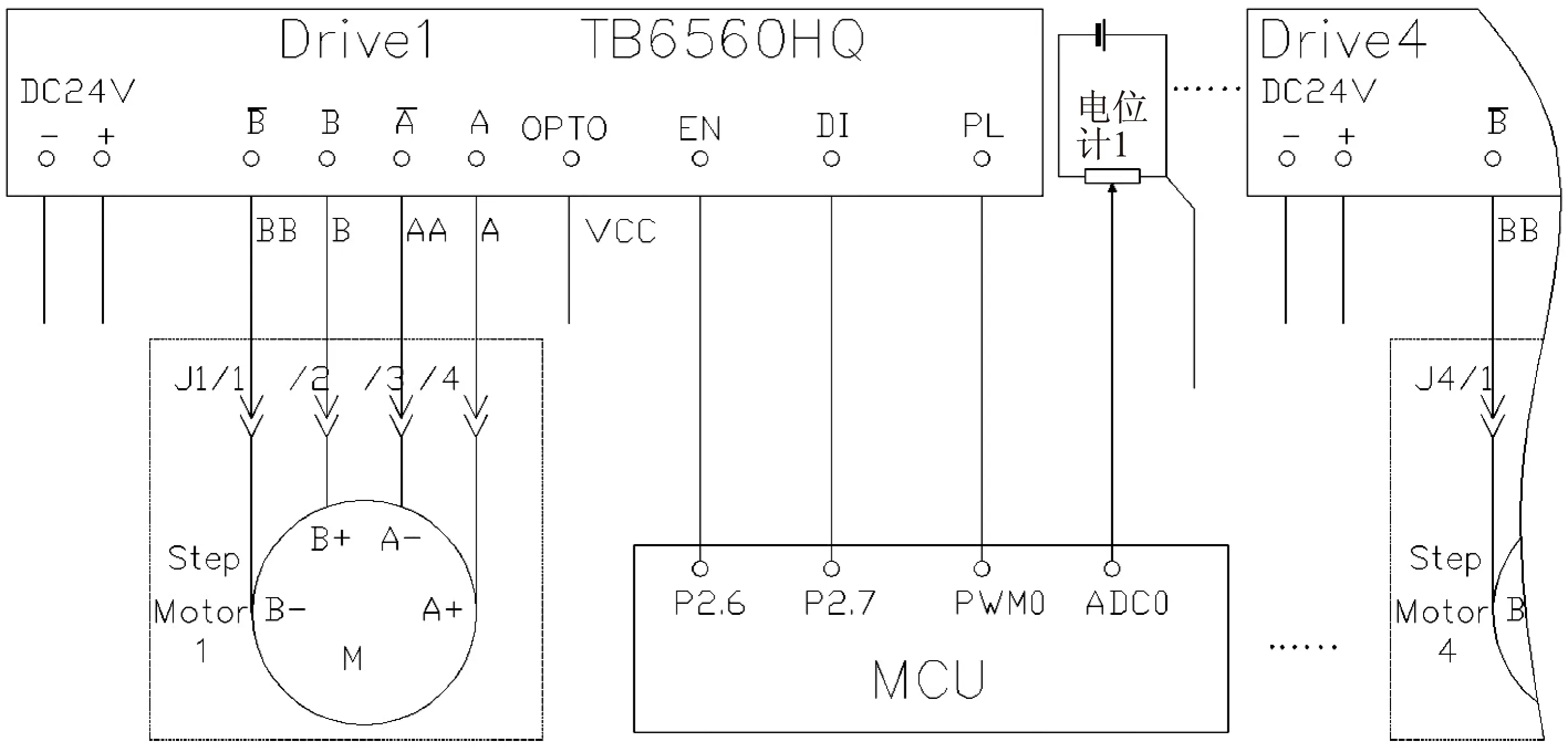
图4 控制电气原理图
3.2 提高执行精度的策略
传统方法是使用专用电路实现恒定脉冲频率驱动步进电机运转,然而步进电机从静止到最高转速的加速过程中的转角与脉冲时间长度不成比例,而且在脉冲停止后由于电机、减速机的惯性会导致定位过冲现象,因此恒频驱动不能够满足阀门的精度要求,需要针对存在的丢步和过冲现象采用加减速策略解决这一问题,使用单片机的PWM复用端口发送变频率脉冲使电机平稳的加减速,步进电机先经过逐渐加速,达到最大速度后稳定运行一段时间,再经过逐渐减速,速度过渡平稳,能减小丢步发生的几率,有利于提高定位精度[14]。S形加速曲线专用于高精度定位的场合,速度为一阶连续可导函数,过渡平滑,能消除失步和过冲现象,而且反应时间快,适用于执行器的定位控制。
设实时速度为v,时间为t,加速度为a,加速度导数为j,S形加速曲线原理如图5所示。从图5可看出,在Ⅰ区内,加速度稳定增大,速度也随之上升,上升率逐渐增大;在Ⅱ区内,加速度稳定减小,速度也仍然上升,但是上升率逐渐降低,在达到Ⅱ区边缘时,速度达到最大值;在Ⅲ区内,保持最大速度运行,一直到Ⅲ区后边缘;在IV区内,做减速运动,加速度绝对值稳定增大,速度逐渐减小,但是减小率逐渐随之增大;在V区内,做减速运动,加速度绝对值稳定减小,速度逐渐减小,但是减小率逐渐降低,在到达V区边缘时速度减到最小,整个过程速度过渡平缓,没有剧烈拐点,有利于减小步进电机丢步、过冲的可能。
根据执行器整体的转动惯量、驱动转矩、步进电机最大运行速度,经过反复实验确保电机不丢步、不过冲时的最优控制参数,得到合适的加速曲线加速特性,其中区域Ⅰ、Ⅱ、Ⅳ、Ⅴ区段内每一点的加速度、速度、位移大小及运行时间都是能够确定的,加速阶段和减速阶段对应的位移也相等,均为S0,适用S型加速策略的最小步长为2S0,此时无Ⅲ阶段的运行。在实际定位过程中,Ⅲ阶段是运行时间最长、最主要的环节,设定位长度为S,则Ⅲ阶段对应的位移为S-2S0,其运行速度为Vmax,则可以计算出Ⅲ阶段运行时间tⅢ为:

为了使控制程序简洁可行,设定起步速度为零,规定j为绝对值不变且经过多次测试优化得到的确定值;区段tI、tⅡ、tIV、tV的值相等而且是通过实验得到的确定值T,各区段的速度值计算如下。
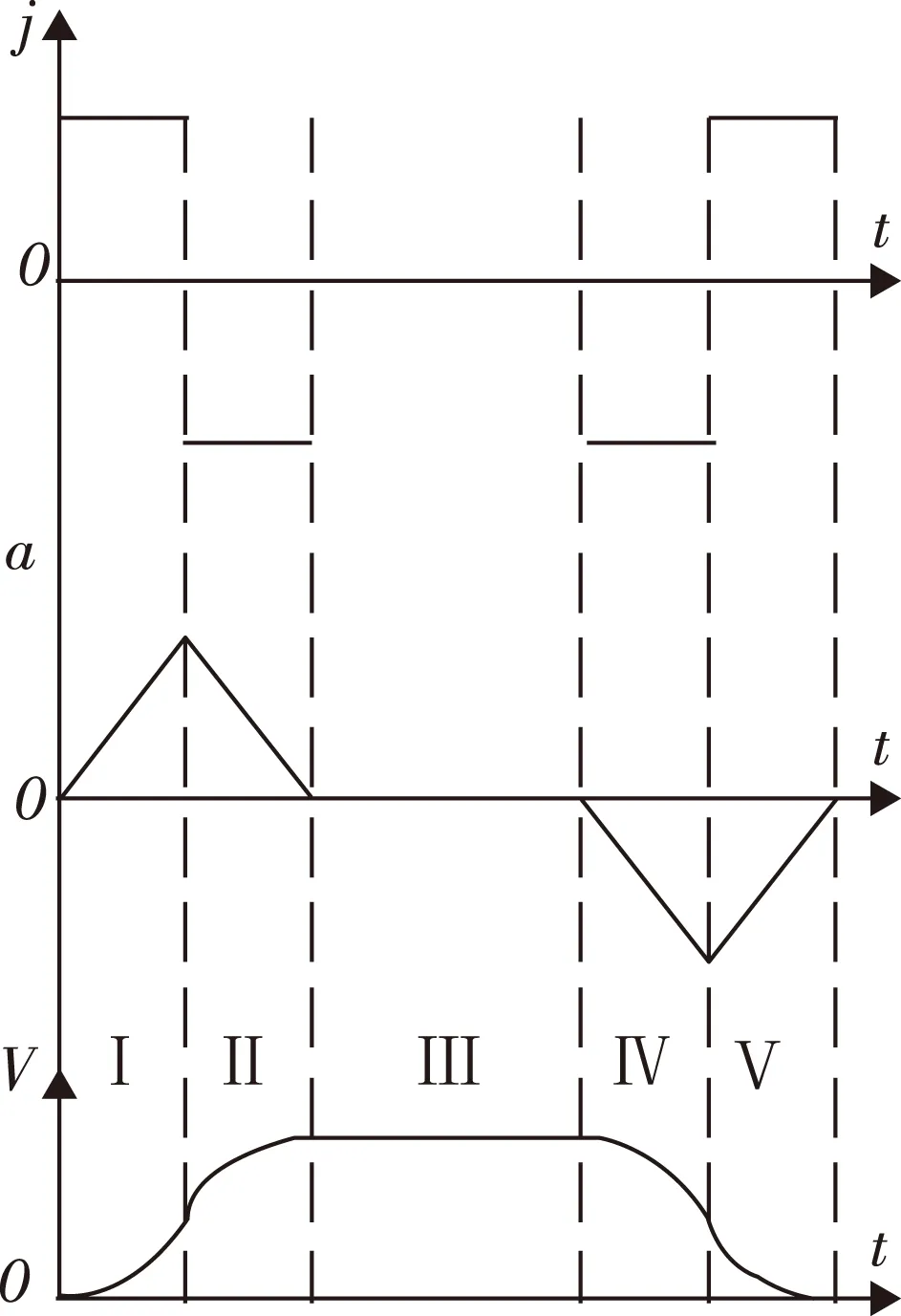
图5 S形加速曲线原理
Ⅰ区段末端速度:
Ⅱ区段:aⅡ=2j·T-j·t
Ⅱ区段末端达到最大速度:
vmax=j·T2
令M=(2T+tⅢ):
IV区段:aⅣ=-j·(t-M)

IV区段末端速度:
V区段:vⅤ=-j·(4T+tⅢ-t)

V区段末端速度:
vⅤ末=0
经过定位后速度平缓过渡到0,能够有效地防止步进电机的丢步或过冲现象。将加减速阶段的速度折算成脉冲频率,经过高速脉冲输出脉冲程序运行即可驱动步进电机运转。在加速区段与减速区段速度和时间是二次函数的关系,若将公式直接送入单片机程序计算执行,会耗费较多的时间和较多的步长,每个定位周期内加速区段和减速区段速度与时间的关系为确定值,为了加快单片机的运行速度,将速度与时间的函数离散化,存入控制器内存,单片机以查表法直接读取变速阶段的速度值,能有效加快控制器的执行速度。经测试,应用S形速度曲线具有良好的定位精度,在千分之一操作步长情况下误差小于1.6%,在更长的操作步长时,误差成比例的减小,置信度足以满足精度要求。
3.3 通信控制设计
每台稀释水水力式流浆箱上安装执行器的数量一般为60~150只,如果采用常规的电缆方式控制,每一个控制信号都由一条电缆实现,控制执行器至少需要6个信号,按平均100台执行器计算则需要600根电缆,电缆数量众多,故障率也高。为了减少控制电缆数量,执行器需要采用通信方式进行控制,每台执行器以不同的站号挂在通信总线上,从总线获取控制数据,其总线结构如图6所示。
横幅定量执行器控制计算机在总线上起到人机监控的作用,提供人机交互平台,主要的功能是定量曲线显示、设定值输入、控制参数设定、手自动切换等;横幅定量控制计算机从定量扫描架获取纸张各区域的定量数据遵循OPC通信协议将定量数据发送到执行器控制计算机,执行器控制计算机又与若干执行器的控制器通过RS485总线相连接,并采用Modbus通信协议进行通信,执行器控制计算机也通过总线向各稀释水控制器发送各区域定量数据、手自动工作状态控制信号、返回各执行器的阀位、报警信息;执行器的控制器向各个步进驱动芯片发送控制信号,使步进电机根据控制信号正转或者反转,驱动阀门阀芯旋转,改变加入系统稀释白水的量,使定量稳定在合理的范围内,并将所辖区域执行器的阀位、全开状态指示、全关状态指示数据发送到RS485总线,供工控机显示和监控;以执行器控制计算机为界将系统分为相对独立的两个区域,横幅定量检测数据可以遵守国际通用的OPC协议,执行器控制计算机能够与不同厂家、品牌的定量检测系统兼容,使该系统具有良好的国际统一标准接口,增强本系统的普适性[15];执行器控制计算机通过Modbus通信协议连接各稀释水控制器,组成一套相对封闭的系统[16]。Modbus协议详细定义了校验码、数据序列等,这些都是特定数据交换的必要内容,在一根通信线上使用主从应答式连接(半双工),这意味着一根单独的通信线上信号沿着相反的两个方向传输。主计算机的信号寻址到一台唯一的终端设备(从机),然后终端设备发出的应答信号以相反的方向传输给主机。Modbus协议只允许(执行器控制计算机)和执行器控制器之间通信,而不允许执行器控制器之间的数据交换,这样各控制器不会对其他相邻的设备产生额外的通信负载,仅限于响应到达本机的查询信号[17]。
总线型控制系统的关键指标为稳定性及通信速度,与之相关的因素为系统控制站节点数量,节点数越多,通信需要查询的站号就越多,通信速率越低,每个执行器控制器内的单片机都在总线上有唯一的地址编号,一块单片机通过PWM复用端口控制4台执行器的工作,相比传统的一块控制器仅仅控制一台执行器的方案,本系统站点数量仅为传统方法的1/4,通信负荷随之降低,有利于提高通信控制的稳定性及速率。
4 结 语
横幅定量执行器是一种高度集成的精密组件,在机械上追求精巧设计,在控制上需要考虑提高精度和可靠性的方法。控制器的核心与传统的51系列单片机不同,使用最新增强型具有复用端口的单片机实现高速脉冲发送、阀位模拟量信号采集、通过总线通信进行控制能有效地降低生产成本,所需元件数量少,也有利于提高系统的可靠性;采用S形速度曲线加减速使阀门转动过渡平稳,有效地提高了阀位控制精度。阀门的机械组件及电子控制元件均为工业标准化系列产品,生产成本低,产品的综合性价比高,具有广阔的市场前景。执行器的控制技术及精度领先于国内传统的以异步电机、同步电机作为驱动元件的阀门,其技术能够方便的移植到其他阀门、执行器上,在其他需要高精度流量控制的工业场合如石化、食品、轻工等行业也具有大量尚未开发的市场及应用。
[1] Metso Automation Inc. Metso IQ Dilution and IQ Slice Profilers-Basis weight profilers [R]. Helsinki, 2011.
[2] Automation & Control Solutions, Process Solutions, Honeywell. ProFlow Product Information Note [R]. Morris Township, 2010.
[3] Paper, Voith. OnQ Module Tap CD Profile control with ball valves on the headbox[R]. Heidheim, 2012.
[4] ABB. Weight Xp Family[EB/OL]. http://www.abb.com/industries/db0003db001873/f5b09ab5e3cb7fe8c12579a5003fce2e.aspx?productLanguage=us&country=CN, 7-5-2013.
[5] ZHONG Yi-lian. Web Quality Control Function and Its Implementation[J]. China Pulp & Paper, 2014, 33(3): 44. 钟益联. 纸张质量控制功能及其实现方式[J]. 中国造纸, 2014, 33 (3): 44.
[6] Zhang Liang, Zhou Yong, Mo Jianjun. Intelligent control device for quantitative dilution water for paper banners: CN, CN201010590897.[P]. 2010-12-16. 张 亮, 周 勇, 莫建军. 纸张横幅定量稀释水智能控制装置: 中国, CN201010590897[P]. 2010-12-16.
[7] Feng Yucheng, Chen Kefu. Smart actuator for headbox dilution water used to control paper breadth quantification: CN, CN201410013126[P]. 2014-01-10. 冯郁成, 陈克复. 一种用于流浆箱的稀释水控制纸张横幅定量的智能执行器: 中国, CN201410013126[P]. 2014-01-10.
[8] Toshiba. TB6560HQ, TB6560FG PWM Chopper-Type bipolar Stepping Motor Driver IC[R]. Janpan, 2006.
[9] WANG Bo, TANG Wei, LIU Qing-li, et al. Research and Development of Medium High-precision Valve for Basis Weight Control of Paper Machine[J].China Pulp & Paper, 2014, 33(3): 39. 王 博, 汤 伟, 刘庆立, 等. 国产造纸机用中高精度定量阀的研制[J]. 中国造纸, 2014, 33 (3): 39.
[10] Ateml Corporation. AT89S52 Data Sheet[R]. San Jose, 2008.
[11] Icon Group International. The 2013-2018 World Outlook for Automotive Microcontroller Units (MCUs)[R]. Las Vegas, 2013.
[12] Jean J Labrose, Shao Beibei, Gong Hui(translator).μC/os-Ⅲ-TimeKernel[M]. Beijing: Publishing House of electronics industry, 2012. 拉伯罗斯, 邵贝贝. 嵌入式实时操作系统[M]. 宫辉, 译. 北京: 电子工业出版社, 2012.
[13] STC MCU Ltd. STC12C5620AD series MCU Data Sheet[R]. Nantong, 2011.
[14] Xu Yaru, Lu Jingping. Control Algorithms Study on Quickly and Smoothly of Stepper Motor[J]. Drive and Control, 2014, 42(8): 90. 徐亚茹, 陆静平. 步进电动机快速平稳起动控制算法研究[J]. 微特电机, 2014, 42 (8): 90.
[15] Mazinan A H, Kazemi M F. Recent developments on applications of sequential loop closing and diagonal dominance control schemes to industrial multivariable system[J]. Journal of Central South University, 2013, 20(12): 3401
[16] Zhang Jing, Zheng Xitao, Yu Yehua. Network Structure and Reliability Analysis of a New Integrated Circuit Card Payment System for Hospital[J]. Journal of Shanghai Jiaotong Univ. (Science), 2013, 18(5): 630.

(责任编辑:董凤霞)
Design of Cross Direction Basis Weight Control Actuator of Dilution Water Hydraulic Headbox
WANG Bo1,2,*TANG Wei1,2DONG Ji-xian1,2WANG Xi2,3WANG Feng4
(1.College of Light Industry and Energy, Shaanxi University of Science & Technology, Xi’an, Shaanxi Province,710021;2.ShaanxiResearchInstituteofAgriculturalProductsProcessingTechnology,Xi’an,ShaanxiProvince, 710021;3.ShaanxiXiweiProcessAutomationEngineeringCo.,Ltd.,Xianyang,ShaanxiProvince,712081;4.ZhejiangLinuoFlowControlTechnologyCo.,Ltd.,Rui’an,ZhejiangProvince, 325200)
Considering high price of imported and low accuraly and integration of domestic products of cross direction basis weight actuator of dilution water headbox, a new type of circuit board integrated controller was developed. In order to improve the accuracy of valve, using S-curve of speed to treat the lose step and overshoot of the drive element. The controller used the MCU’s four-channel multifunction high-speed pulse port controlled the stepper motor drive chips, the valve’s position signal were measured by high precision potentiometer and sent to the MCU’s multifunction analog input channel port via the multifunction port of analog to collect the valve position. The controllers were connected together by communication bus; a single controller could control four dilution water valves, which improved the integrated level and applicability.
cross-direction basis weight ; dilution water headbox; S-curve of speed; actuator
王 博先生,在读博士研究生;主要研究方向:光机电一体化产品研制。
2014- 12- 03(修改稿)
项目资助:国家自然科学基金(51375286);陕西省科学技术研究发展计划项目“智能高精度定量阀的研制”(2014K07-22);陕西省科技计划(2011K09-18);陕西省科技统筹(2012KTCQ01-19);陕西省自然科学基金重点项目(2012JZ7002);西安市科技项目(CXY1431-2);西安市未央区科技项目(201311)。
TH137.52+2, TS734
A
0254- 508X(2015)05- 0041- 06