双馈风机机侧换流控制器快速原型设计
2015-01-15陈康博冯海涛余永元
陈康博,谭 兴,冯海涛,余永元
(贵州大学 电气工程学院,贵州 贵阳 550001)
0 引言
xPC target技术可将simulink模型自动的转化为工控机可以执行的C代码,并将代码下载到运行实时内核的目标工控机中高速运行,工控机通过数据采集卡与控制对象交换信息。xPC target快速原型化技术相对于手动编写程序的DSP与FPGA大大提高了实验效率[1],与其他快速原型化设备相比,又是一种低成本解决方案。
RTDS实时数字仿真器[2]可以方便直观的对系统内的任意变量进行监控、对变量进行在线调整,模拟任意的电力系统环境,在各种工况下对被测试设备进行检验;相对于物理模型,操作简单方便,安全可靠,并可以模拟物理模型无法实现的各种工况,大幅度提高了实验效率。
1 系统组成
1)RTDS:RTDS以小于2 μs的小步长运行双馈风机模型的主电路,以大步长运行风机所在的电力系统模型和风机的网侧换流器控制及变桨控制等。本文通过GTAO模拟输出卡输出发电机转速、位置量,三相定子电压、转子电流、转子电流等模拟电压信号,通过GTDI数字输入接收DSP发出的6路数字PWM信号。
2)xPC target目标机:即安装有多功能数据采集卡的工控机。本实验中xPC target目标机作为“极控”,通过数据采集卡采集风机各个参数,经过矢量控制输出机侧换流器的基准电压信号。工控机通过制作好的U盘启动盘启动,实时运行上位机下载的C代码,由于涉及到变频器控制,为了最大限度的提高运行速度,目标机运行方式采用“polling”模式,而非中断模式[3],并且选择了采集速度较快的NI PCI 6251多功能数据采集卡,在运算不溢出的前提下最大限度降低运行步长。NI PCI 6251采集卡设置为差分采集模式,降低干扰影响,提高采集精度。NI PCI 6251为多路复用式,每通道采集时间为1 μs,本实验中双馈式风机的额定频率为50 Hz,并且转子电流频率更低,不同步采集带来的误差很小。
3)DSP:由于本实验涉及电力电子器件触发脉冲,PWM调制对运算步长要求较高,所以需要使用DSP充当“阀控”,通过其模拟输入采集xPC target目标机输出的基准电压信号,可以运行各种PWM调制代码。
2 双馈风机变频器机侧控制策略
2.1 电流环控制模型
双馈风机机侧控制采用矢量控制,通过改变机侧换流器交流侧的电压相位、幅值,独立控制发电机发出的有功与无功,并实现最大风力追踪[4]。
双馈电机定转子等效电路如图1所示。

图1 双馈电机定转子等效电路
定转子磁链方程:

式中 ψs、ψr分别为定、转子磁链;is、ir分别为定转子电流;Lo为坐标系下同轴定、转子绕组间的等效互感;Ls为定子绕组的自感;Lr为转子绕组的自感。
从定子磁链方程中提出is:

代入上式到转子磁链方程得:

将方程转化为DQ坐标系下,并在定子磁链定向[5]下有 ψds=ψs,ψqs=0 得:

代入转子电压方程:

式中ωslip为滑差角频率,Rr为转子电阻,udr为转子电压D轴分量,uqr为转子电压Q轴分量。等式右端括号外的为解耦项。括号部分是前馈补偿值,为了使DQ轴完全解耦。
对应上式(5)的控制模型[6]如图2。
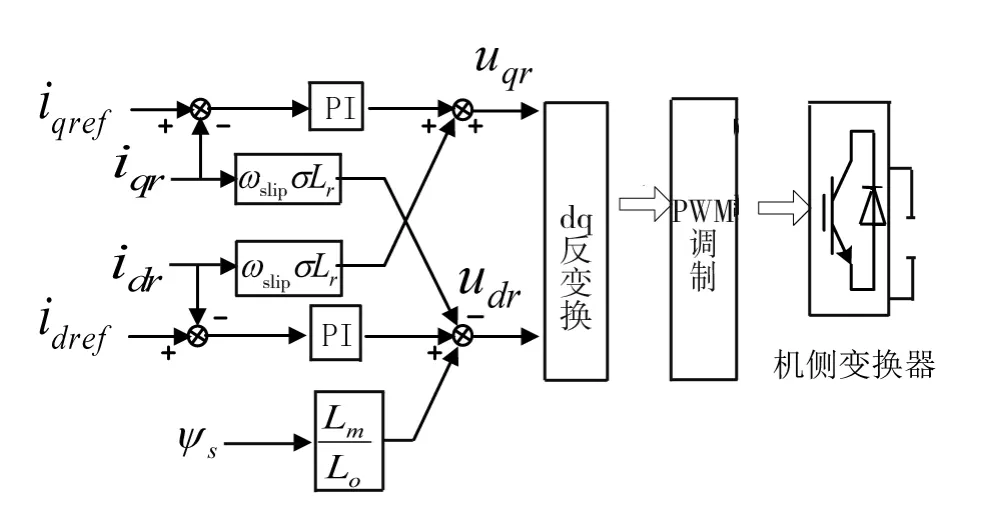
图2 电流环控制模型
单独调节D轴电流给定和Q轴电流给定可单独调节风机输出有功,定子输出的无功。
2.2 最大功率追踪实现方法
为实现最大功率捕捉,需要对Q轴电流给定值进行计算。反馈当前风机转速,并假设其为最佳转速(最佳叶尖速比下的转速)。

通过公式求出以此转速为最佳转速时对应的最大功率,并求出相应的最佳电磁转矩。

通过公式求出最佳电磁转矩对应的Q轴电流。并以此电流作为Q轴电流给定[7]。
若当前转速低于最佳转速,那么通过当前转速计算的最大功率popt会小于风轮机的机械功率,风机的电磁转矩也会小于机械转矩,风机加速直到达到最佳叶尖速比。同理,若当前转速高于最佳转速,风机会减速直到达到最佳叶尖速比,实现最大功率捕捉。
3 试验装置与RTDS的联机试验
风速从8 m/s突变为12 m/s双馈风机的运行状态。

图3 风速突变时风机出口电压(标幺值)
风机出口电压如图(3),本实验双馈风机是经过10 kV电路并网,由于线路阻性参数不能忽略,并控制风机输出无功不变,风机有功增加会略微提升风机端电压。

图4 风速突变时风机功率(标幺值)
0.6 s时风速突变,风机功率变化如图4,功率在10 s内从0.27 pu上升到额定值。

图5 风速突变时转子电流(kA)
风速突变时转子电流变化如图5电流频率从-20 Hz变为+20 Hz,图中3.5 s时达到同步转速。
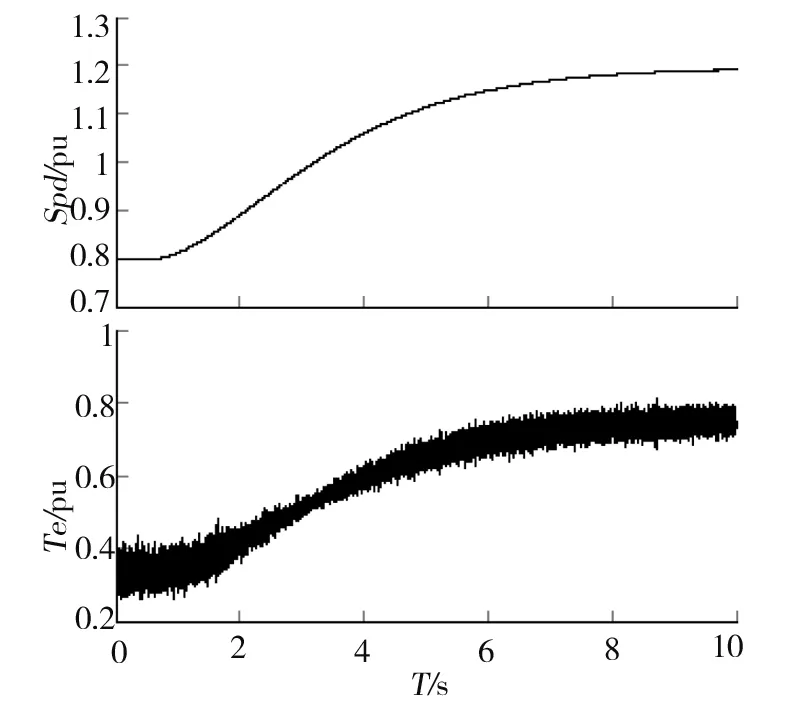
图6 风速突变时转速、电磁转矩(标幺值)
风速突变时转速、电磁转矩的变化如图6,0.6 s之前风速为8 m/s,转速为0.8 pu。0.6 s风速增加到12 m/s,转速相应的也在10 s内达到1.2 pu,维持在最佳叶尖速比,实现最大功率追踪。
图7为12 m/s风速下双馈风机稳定后额定运行状态,转子电流定子电流和定子电压的波形图,波形正常,控制效果较为理想。
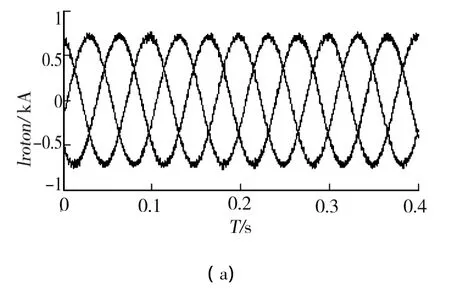
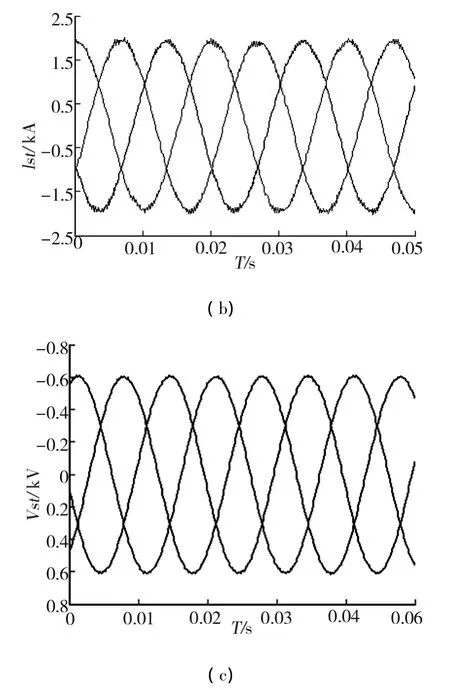
图7 额定运行时定子电压(kV)
4 结论
本文使用xPC-target技术与DSP相结合的办法,完成了双馈风机机侧换流器控制器主要功能的设计。验证了其作为一种低成本快速原型解决方案的可行性,并得出了较理想的控制效果。使用RTDS对风机控制器进行测试,可以方便的设置各种工况,并可以方便直观的对控制效果进行评估。本文使用的方法也可以实现具有风机低电压穿越,桨距控制等其他功能的原型设备的研发与测试。
[1] 李晶.基于xPC target的直线电机快速原型控制系统[J].中国机械工程,2011,22(20):2452-2455
[2] 郭琦.图形化RTDS在线实时仿真系统[J].电力系统自动化,2010,39(13):38-42
[3] xPC Target User’s Guide[Z].Mathworks,2013:279-290
[4] R.Pena,J.C.Clare,G.M.Asher.Doubly fed induction generator using back-to-back PWM converters and its application to variable speed wind-energy generation[J].1996,IEE Proc.Power Appl.,(3):231-241
[5] 张世界.异步电机基于定子磁场定向的矢量控制系统的研究[J].信息化纵横,2009,(17):67-69
[6] 邱生卓.双馈风力发电场对电网暂态无功补偿的研究[J].电测与仪表,2013,50(8):58-61
[7] Wind-turbine driven double-fed induction generator[Z].RTDS technologies,2011
