光伏发电系统太阳方向检测方法研究
2015-01-13兰建军陈杰辉
兰建军 陈杰辉 李 超
(东北电力大学自动化工程学院,吉林 吉林 132012)
太阳能以其储备丰富、应用广泛、绿色环保及经济等特点备受人们的亲睐[1],但其发电效率受太阳能电池材料及电池加工工艺等条件的制约。相关研究数据表明:在现有太阳能电池材料和太阳能电池制作工艺条件下,如果光伏组件能够自动跟踪太阳,其发电效率可比非跟踪形式提高30%以上。因此,准确跟踪太阳从而提高太阳能的利用效率是太阳能利用的研究热点[2~4],目前主要采用主动跟踪和被动跟踪两种方法跟踪太阳[5]。主动跟踪方法采用视日运动轨迹法进行跟踪,该方法需要明确跟踪地点的经度和纬度,且跟踪误差通常都在±3.00°以上,跟踪范围大,但跟踪精度低[6];被动跟踪方法是通过光电检测太阳的方位角和高度角后进行跟踪的,该方法利用多个光电传感器,结合相应的检测和判断逻辑来测量方位角和高度角,跟踪精度可达±1.00°,但跟踪范围小[7]。因此可综合采用主动跟踪和被动跟踪两种方法[8],先依据视日运动轨迹进行粗跟踪,然后依据光电检测进行细跟踪,跟踪精度可提高到0.10°,但系统结构和控制程序较为复杂,成本高,且检测装置和控制装置需要配套使用,不具有通用性,在实际应中推广较难。
为了解决光伏发电中太阳检测精度低的问题,笔者提出了一种基于线性CCD的太阳方向检测方法。本方法采用机械装置对太阳光线进行采样,利用线性CCD对太阳光线位置进行检测,然后依据线性CCD的数据计算出表征太阳方向的高度角和方位角。本方法与现有利用CCD对太阳斑点进行图像检测的方法相比,无需进行复杂的图像处理,也不需要进行防曝光处理,同时机械结构简单,在实际应用中具有明显的优势[9~11],目前国内外尚未有与本方法类似的太阳方向检测方法的文献。最后在设计的实验装置上对本方法的可行性进行验证,实验数据表明,利用本方法进行太阳方向检测精度可达±0.30°。
1 检测原理与机械装置设计①
1.1 检测原理
图1为装置检测原理示意图,在一块不透光的挡光板上设置一个透光缝,由于太阳光线近似为平行光,当透光缝的宽度大于太阳光线波长时,不会发生光衍射现象。如果太阳光线垂直照射挡光板时,穿过透光缝的太阳光线处于阴影的中线位置,当太阳处于不同高度时,穿过透光缝的太阳光线将偏离中线位置。如果能检测出不同太阳高度产生的光线偏离中线的距离,就可以计算出太阳光线照射挡光板的角度。
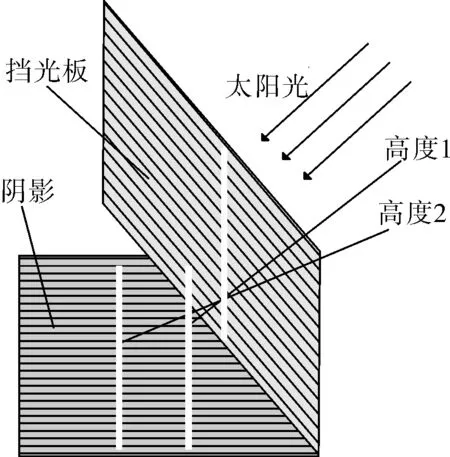
图1 装置检测原理示意图
图2为太阳光线方向计算原理示意图,当太阳光线垂直照射透光缝时,在检测面中心处产生和透光缝宽度d相等的亮条纹。当太阳光线偏离采样面法线方向α角度时,检测面上的亮条纹从中心点处移至离中心点x处,x的值可以由线性CCD模块检测数据获取。太阳光线偏离法线角度α的计算式为:

(1)
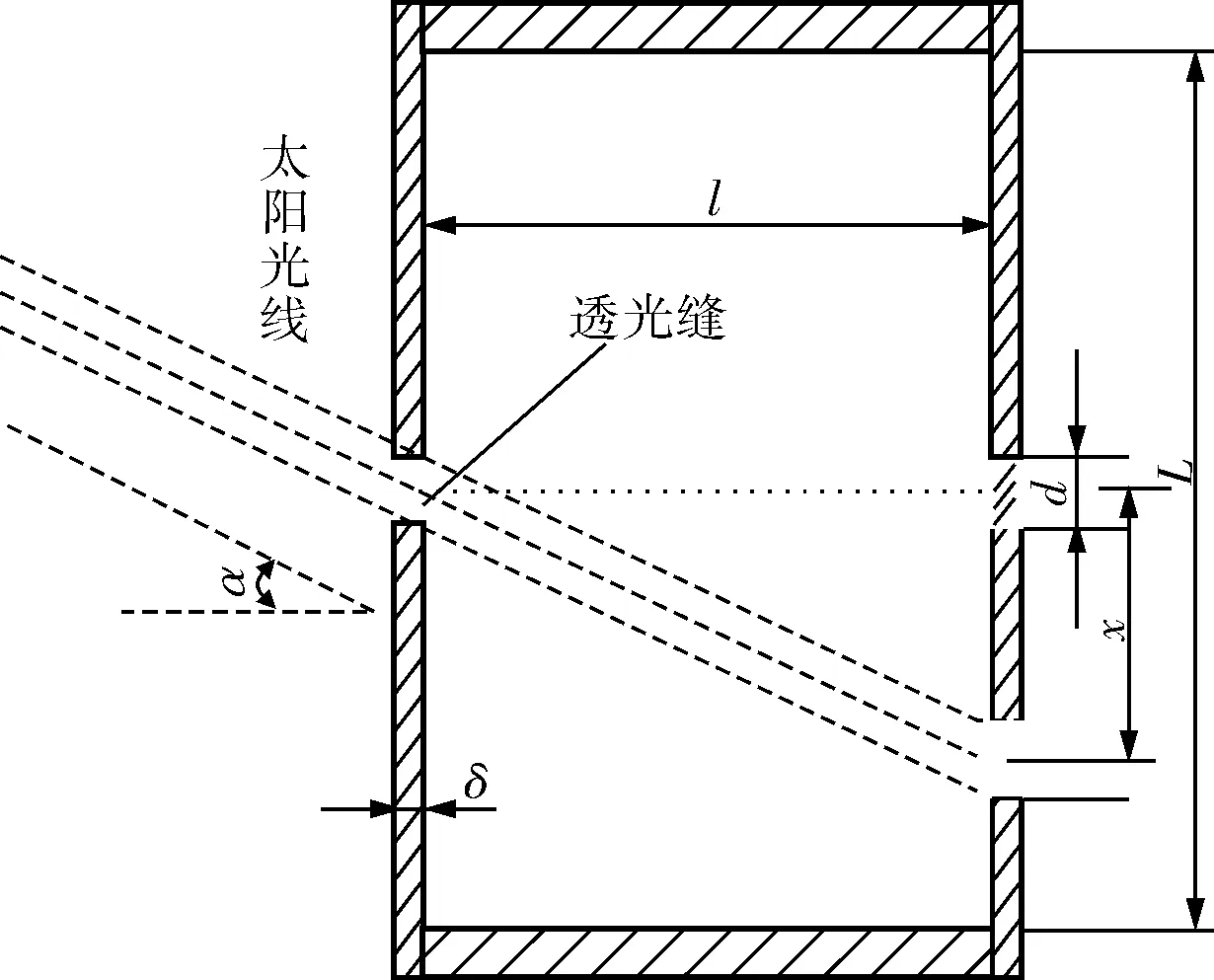
图2 太阳方向计算原理
为了保证装置能够测量较大的太阳光线偏差角度,要求透光缝的厚度δ应当尽可能的小。
1.2 机械装置设计
为了实现太阳方向的检测,设计了太阳光线方向检测装置(图3)。该装置由一个不透光的密闭采样容器构成,密闭容器的一侧为采样面,另一侧为检测面。采样面上设有垂直分布的透光缝,太阳光线通过透光缝进入采样容器,在检测面相应位置上得到太阳光线。采样面的背光面安有线性CCD,可以检测太阳光线在检测面上的位置。
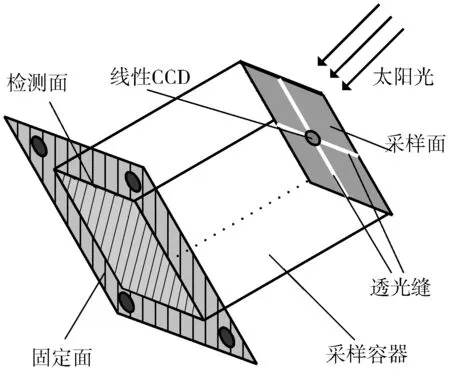
图3 装置结构示意图
采样面上两条垂直分布的透光缝,一条用于检测方位角,另一条用于检测高度角。由于线性CCD只能采样一维图像,如果同时测量高度角和方位角就需要设置两个线性CCD,势必会增加装置的成本,同时也使装置结构变得更复杂,因此在采样面上设置一个可90°旋转的舵机,由舵机带动线性CCD旋转,从而实现高度角和方位角的同时测量。
2 控制系统设计
2.1 软、硬件设计
硬件电路主要包含控制器模块、太阳光线检测模块、舵机控制模块、环境光照检测模块和通信模块(图4)。控制器模块以飞思卡尔半导体公司ARM Cortex-M4内核的MK60DN512微控制器为主控器,该处理器内部集成高精度的A/D转换接口和PWM接口,无需外部扩展就可方便地实现线性CCD数据的采集和舵机的控制;线性CCD选用LORAL公司的CCD111模块,该传感器内部包含256个线性排列的光电二极管,每个光电二极管都有各自的积分电路,每个像素所采集的图像灰度值与它所感知的光强、积分时间成正比,具有非常宽的动态响应范围,同时和微控制器连接只需3根线;舵机选用MG90全金属舵机,该舵机具有扭矩大、性价比高的优势;通信模块用于将测量的数据向外以数字形式输出;环境光照检测模块用于检测环境光强度,当光照强度过低时,停止CCD111数据采集工作,同时通过串口模块向外发送信号,可作为跟踪装置停止跟踪控制信号,环境照度检测模块选用TAOS公司的光强数字传感器TSL2561,提供I2C或者SMBus接口,具有50/60Hz光照波动自动抑制性能。
软件设计上主要包括主程序和定时器中断服务子程序两部分,主程序主要完成单片机的中断、A/D、I/O口、串口及定时器等的初始化工作。CCD111和TSL2561数据的读取与处理及角度数据输出等工作都在定时器中断服务子程序中完成。
2.2 曝光时间控制
单片机定时采集CCD111的数据,数据经过处理后进行角度计算。由于线性CCD传感器的曝光时间受环境光照度影响较大,为了保证图像采集的质量,通常要求在光线较暗的环境中增加曝光时间以保证图像亮度合适;同时为防止图像饱和现象的发生,在光线较强的环境中应减少曝光时间。由于太阳光线强度是变化的,为了保证采集的图像质量,要求CCD111的曝光时间能根据光线条件进行动态调整,因此设计了如图5所示的曝光时间控制结构,程序实时采集CCD111数据后进行曝光量的偏差计算,根据偏差进行比例调节后确定曝光时间,从而实现曝光时间的自动调整。

图4 系统电路原理图
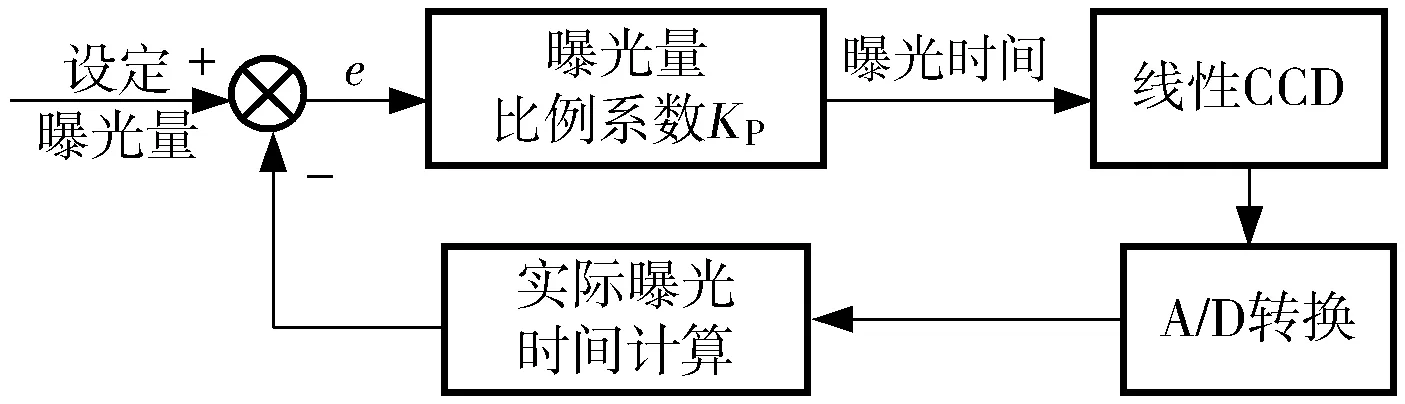
图5 曝光时间调整示意框图
2.3 光线位置计算
CCD111的数据来自256个线性排列的光电二极管,可存放于一个数组中,图6a为光线在某位置时CCD111采集的256个像素点的原始灰度值数据曲线和灰度图,数据处理的灰度数据和灰度图如图6b所示。根据灰度数据曲线和灰度图可分辨出光线的大致位置,然后通过最大灰度值查找对应的像素点计算出光线偏离中心点的距离,最后依据式(1)完成角度计算。
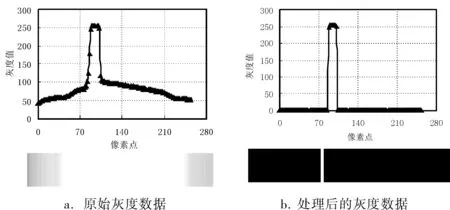
图6 灰度数据曲线和灰度图
3 系统测试与数据分析
根据图2设计了太阳方向检测装置,装置的机械参数为:光缝宽度d=0.10cm,采样面和检测面均为正方形,边长L=9.00cm,光缝离采样面的距离l=4.50cm,导光缝厚度δ=0.10cm。调节线性CCD的镜头焦距,使线性CCD在检测面的检测宽度为L,因此线性CCD的距离分辨精度为L/256=0.035cm。将设计的太阳方向检测装置固定于云台上,云台上装有北京磁通伟业传感器技术有限公司的WYT-AT-3V0无触点角度传感器,其分辨率不大于0.05°,测量范围0.00~90.00°。太阳光通过卤素灯进行模拟,旋转云台后可以利用角度传感器对设计太阳方向检测装置测试。
为了验证本方法的检测精度,以太阳方位角测量为例对装置进行了数据测试,表1为方位角测试的部分数据,实验数据表明,该检测装置测量太阳方位角范围为45.00~135.00°,测量误差小于±0.30°,相对误差小于0.50%。为了提高太阳方位角的检测范围,需要保证检测面的长度L尽可能地大于透光缝到检测面的距离l,但这将导致检测装置体积增加;为了提高方位角的检测精度,需要提高线性CCD的分辨率,但同时也会增加系统的检测成本。
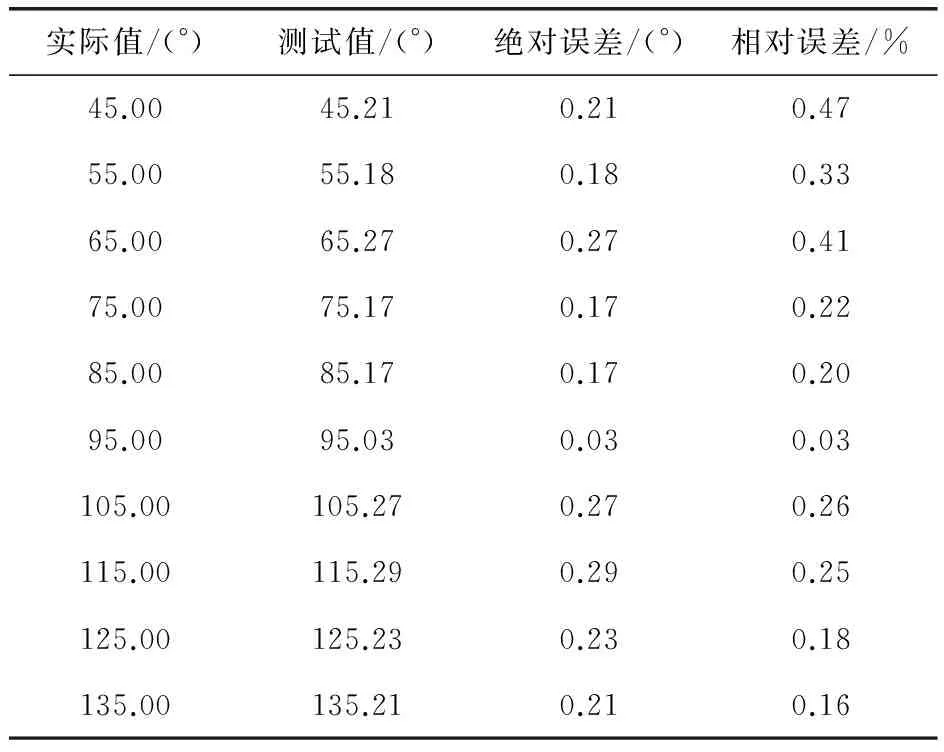
表1 太阳方向检测装置实验数据
4 结束语
在现有太阳方位角和高度角检测方法的基础上,综合光电和图像检测的优点,提出了一种基于线性CCD的太阳方位角和高度角检测方法,并进行了太阳方向检测装置的机械装置和系统设计。采用了CCD曝光时间自调整策略后实现CCD曝光时间自动调整,绘制了灰度数据曲线和灰度图。最后在校验装置上对设计的装置进行了验证,实验数据表明,在0.00~90.00°的偏差角度范围内,该方法可以同时实现太阳方位角和高度角的检测,测量误差小于±0.30°。
[1] 施云芬,张更宇,孙萌,等.太阳能加热污水厌氧生物处理领域研究现状及展望[J].化工机械,2013,40(6):703~708.
[2] 王小鑫,胡红利,王博.高精度太阳能跟踪控制器[J].电光与控制,2012,19 (12):80~83.
[3] 韩旭同,王中训.高效太阳能发电系统的设计[J].自动化仪表,2013,34(2):52~55.
[4] 王欣,张宇,刘士宏.基于系统动力学的光伏发电系统建模与仿真[J].东北电力大学学报,2012,32(5):16~19.
[5] 刘文,周旺平,王国栋.基于DSP的斜轴式太阳跟踪系统[J].电子技术应用,2014,40(5):24~27.
[7] 郑黎明,黄剑波.基于ADAMS和Simulink的太阳跟踪器联合仿真[J].光学精密工程,2014,22(5):1212~1219.
[8] 张磊,郑喜贵.高精度太阳能自动跟踪装置的研制[J].制造业自动化,2014,36(5):129~132.
[9] 黄欣,沈湘衡,叶露.外部因素对光电跟踪仪低对比度目标捕获能力的影响分析[J].光学学报,2014,34(7):210~217.
[10] 周亚光,滕继涛.基于DSP和CCD的太阳角度偏差检测仪[J].电子测量技术,2012,35(5): 33~35.
[11] Kelly N A, Gibson T L. Improved Photovoltaic Energy Output for Cloudy Conditions with a Solar Tracking System[J]. Solar Energy, 2009, 83(11): 2092~2102.