石化装置高压电动机磁平衡差动保护的整定
2015-01-13施文丰黄跃进
施文丰 黄跃进
(中国五环工程有限公司,武汉 430223)
随着各种石化工艺包的引进,国外进口的大型高压电动机(如大型电动压缩机组等)在石化装置中被越来越多地使用。进口大型高压电动机常配套磁平衡差动保护作为电动机的主保护,由于磁平衡差动保护(对比传统纵联差动保护)的优点[1],越来越多的国产电动机也开始使用磁平衡差动保护。但迄今为止,高压电动机磁平衡差动保护的整定仅有继电保护厂家提供的公式和较少的文献参考,还没有国家、行业标准或设计手册对磁平衡差动保护及其整定进行明确表述[2]。
鉴于国内石化企业6kV和10kV系统中性点接地方式的多样性,针对各种接地方式对高压电动机磁平衡差动保护整定进行探讨很有必要。
根据国家标准的相关规定,2MW及其以上或电流速断保护灵敏系数不符合要求的2MW以下的电动机,应装设纵联差动保护,其工作原理如图1所示[1],保护装置应瞬时动作于跳闸[3]。

图1 纵联差动保护工作原理
通常电流互感器TA1装设在高压开关柜,TA2装设在现场高压电动机的专用接线盒,由于两组互感器二次负载不一致,装设在现场的TA2更易饱和,这就使得电动机在启动或外部发生短路故障时(此时电动机的反馈电流按堵转电流考虑),保护装置测得的不平衡电流会较大,纵联差动保护容易误动作;当高压电动机与高压开关柜的距离越远时,此类问题越容易发生。尽管有些保护厂家通过刻意提高电动机启动时的保护定值来躲过电动机启动时的不平衡电流,但也无法避免外部发生短路时的误动作;且电动机启动时,纵联差动保护的灵敏系数也较低[4,5]。
磁平衡差动保护的工作原理如图2所示[1]。通常,磁平衡差动电流互感器TA装设在现场电动机接线箱内,使电动机定子绕组的始端和中性点端同时穿过TA。这样,不管是在启动还是在运行过程中,流入定子绕组始端与流出中性点端的电流始终相等,对TA而言,一次励磁安匝数为零,二次侧不产生感应电流,也就不会因电动机启动或外部短路故障而使保护误动作。而电动机内部短路时(除匝间短路外),由于流入定子绕组始端与流出中性点端的电流将不再相等,TA二次侧将感应出电流,从而使保护可靠动作。另外,在正常运行时,TA二次侧感应的不平衡电流非常小,TA的二次侧开路一般不会产生过电压。
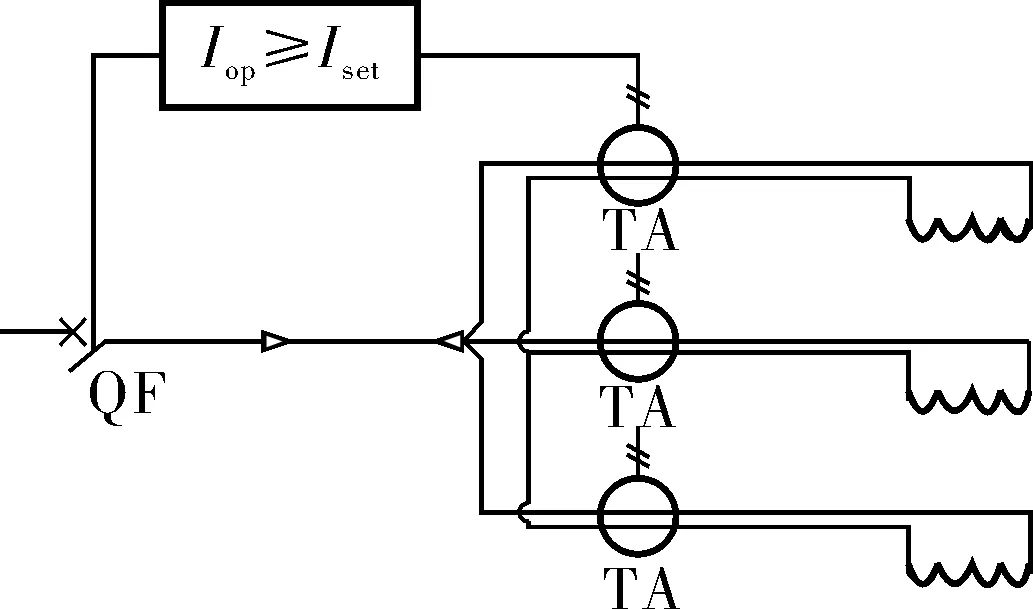
图2 磁平衡差动保护示意图
2 现有资料中磁平衡差动保护的整定
现有继电保护厂家提供的公式或文献中基本都按躲过外部单相接地短路时的不平衡电流[1]或躲过启动(堵转)时的不平衡电流[2]两种方法对电动机磁平衡差动保护进行整定。
2.1 躲过外部单相接地短路时的不平衡电流
系统正常时,根据基尔霍夫定律,TA能检测电动机绕组的对地电容电流。当电动机外部发生单相接地短路时,故障相电压为零,故障相的TA将不再能检测电动机绕组的对地电容电流;非故障相对地电压升高为系统的线电压(中性点不接地系统,此种接地方式非故障相对地电压升高得最大),此时非故障相的TA能反映电动机绕组的对地电容电流,如图3所示。
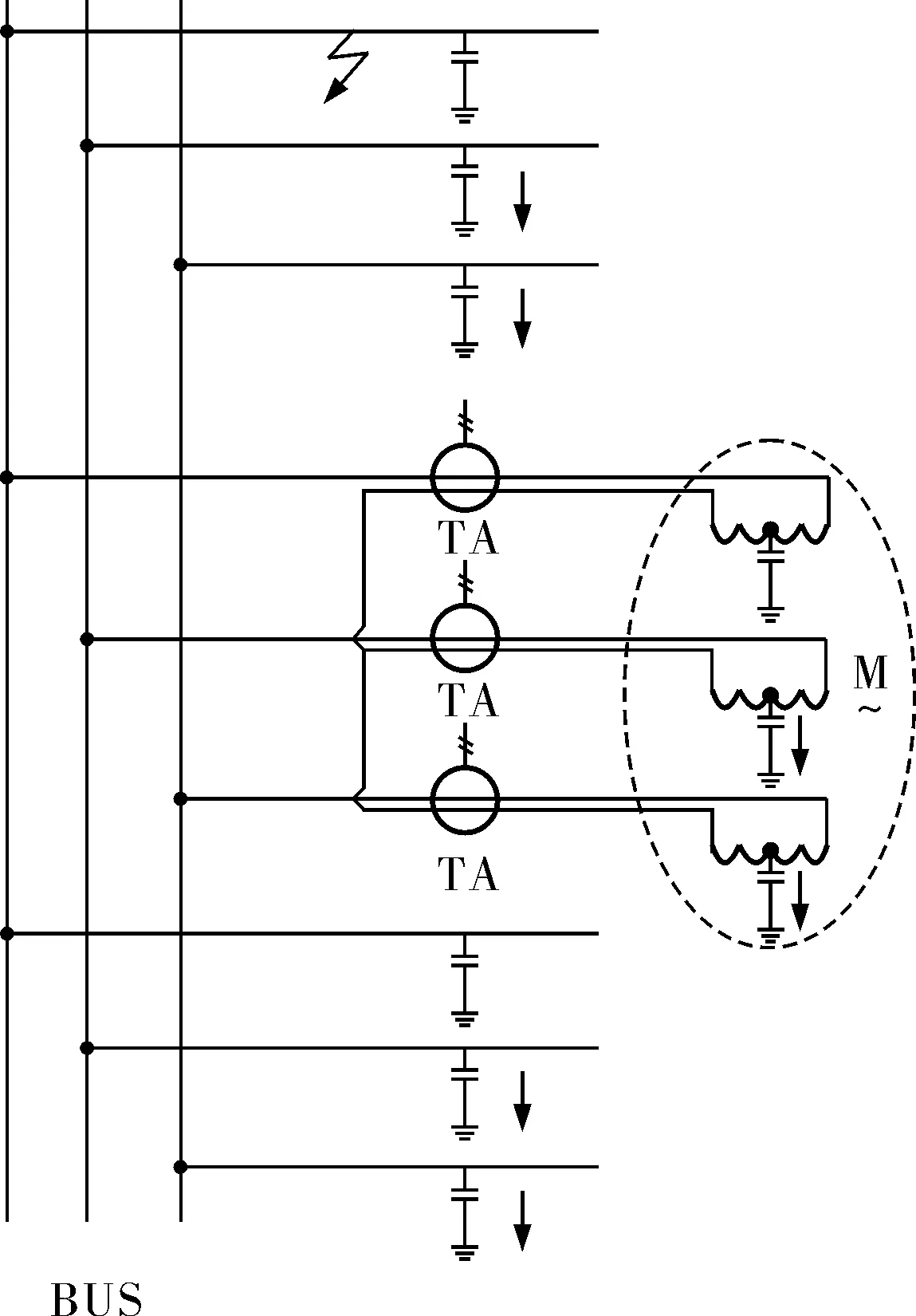
图3 外部单相接地短路电容电流分布

=Kk·U·ω·Cp/nTA
(1)
式中Cp——电动机单相绕组对地电容值;
Kk——可靠系数;
nTA——TA变比;
U——系统线电压;
Up——系统相电压;
ω——角频率。
2.2 躲过启动(堵转)时的不平衡电流
由于流入TA与流出TA的电流在TA中的空间位置的不对称、电动机绕组的对地电容电流和TA本身磁路的不对称,启动和正常运行时,TA二次侧总能检测到一定大小的不平衡电流(Iimb)。正常运行时,通常情况下TA的实测Iimb的值不大于0.5%的运行电流。
因此,与传统的纵联差动保护一样,磁平衡差动保护整定时也必须躲过电动机启动(堵转)时的不平衡电流,即:
Iset=Kk·Kp·Kq·In/nTA
(2)
式中Kp——电流不平衡系数,通常取0.5%;
Kq——电动机启动倍数(堵转电流倍数);
In——电动机额定电流。
Kk取1.5,Kp取0.5%,Kq取7,则有:
Iset=1.5×5%×7×In/nTA≈5%×In/nTA
(3)
通常,躲过启动(堵转)时的不平衡电流的Iset比躲过外部单相接地短路时的不平衡电流的Iset要大。即现有保护厂家或参考文献推荐的磁平衡差动保护整定值(一次值)约为5%的电动机额定电流。
3 现有整定方法在石化装置不同中性点接地系统中的适应性
由于现有石化装置的大型化和交联聚乙烯电缆的大量使用,6kV或10kV系统的电容电流越来越大,按照现行国家标准和石化行业标准的要求,石化企业的6kV或10kV系统的中性点接地方式通常采用中性点不接地或中性点谐振接地,也有少数采用中性点低电阻接地[6,7]。
3.1 中性点不接地
根据GB/T 50064-2014,单相接地电容电流不大于10A(不直接连接发电机)的6kV或10kV系统采用中性点不接地方式;当直接连接有发电机不要求瞬时切机时,单相接地电容电流不大于4A(6kV)或3A(10kV)时,系统采用中性点不接地方式。
中性点不接地系统中,当电动机内部发生单相接地故障时,接地点电流为全系统另外两相对地电容电流之和,此值也是磁平衡差动保护电流互感器TA对应的一次电流值(Ic∑),如图4所示。

(4)
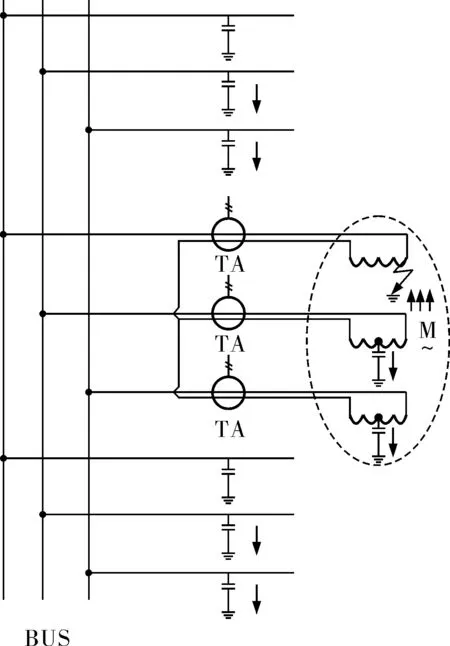
图4 内部单相短路电容电流分布
考虑Iimb与Ic∑方向的随机性,保护装置采集的电流Iop为:

(5)
保护装置的灵敏系数为:

(6)
取Kk=1.5,Kq=7,Kk·Kq≈10,则有:

(7)

如果系统的Ic∑更小或电动机额定电流更大,磁平衡差动保护将无法反映电动机单相接地短路故障。若要求磁平衡差动保护能够反映电动机的单相接地短路,则需满足:

(8)
即:
IcΣ≥16Kp·In
(9)
取Kp=0.5%,IcΣ≥0.08In。
一般来说,6kV或10kV中性点不接地系统,当系统单相接地电容电流不小于8%的电动机额定电流时,磁平衡差动保护能够反映电动机单相接地短路故障。
另外,GB/T 50062-2008规定:单相接地电流为10A及以上时,保护装置应动作于跳闸;单相接地电流为10A以下时,保护装置宜动作于信号。实际应用时,通常依据电动机在工艺流程中的重要性和电动机厂家的推荐来决定保护装置是出口跳闸还是信号。而现有继电保护厂家基本上都将磁平衡差动保护出口设置为瞬时动作于跳闸,此种做法欠妥。
3.2 中性点谐振接地
根据GB/T 50064-2014,单相接地电容电流大于10A(不直接连接发电机)的6kV或10kV系统,又需要在接地故障条件下运行时,采用中性点谐振接地;当直接连接有发电机不要求瞬时切机时,单相接地电容电流大于4A(6kV)或3A(10kV)时,系统采用中性点谐振接地。根据GB/T 50064-2014及SH/T 3060-2013等的要求,消弧线圈补偿后,故障点残余电流应不超过5A,当直接连接有发电机时应不超过4A(6kV)或3A(10kV),取最大值5A作为参考进行后续分析。
石化企业通常要求单相接地故障带故障运行一段时间。因此,按超过上述阈值时,采用中性点谐振接地系统进行分析,具有很强的现实意义。
中性点谐振接地系统中,电动机内部发生单相接地故障时,消弧线圈补偿前,系统就是中性点不接地系统,此处不再重复。
消弧线圈补偿后,参照前面的分析,保护装置灵敏系数为:
(10)
式中Ir——故障点残余电流。
若要求磁平衡差动保护能够反映电动机的单相接地短路,则需满足:
Ir≥16Kp·In
(11)
取Ir=5A,Kp=0.5%,计算得In≤62.5A。
而In≤62.5A的电动机(对应10kV电动机约900kW)通常情况下设置电流速断保护即可满足要求,而不需要再增设磁平衡差动保护。因此,如需要反映单相接地故障,只有磁平衡差动保护在消弧线圈补偿之前动作才有意义。而现有的消弧装置为了尽可能缩短接地电流持续的时间,通常设置为瞬时动作于补偿。这就使得磁平衡差动保护在消弧装置补偿之前动作变得较为困难。
总的来说,如果磁平衡差动保护装置与消弧线圈补偿装置之间没有很好的配合,6kV或10kV中性点谐振接地系统,磁平衡差动保护将不能反映电动机单相接地短路故障。
3.3 中性点低电阻接地
根据SH/T 3060-2013的要求,6~35kV主要由电缆线路构成的供、配电系统单相接地故障电容电流较大时,可采用低电阻接地方式。
当采用低电阻接地方式时,通常按照单相接地故障100~1 000A选择中性点接地电阻。参照前面的分析,中性点低电阻接地系统中,电动机内部发生单相接地故障时,保护装置灵敏系数为:

(12)
式中If——故障点入地电流。
若要求Klm≥1.5,取If=100,Kp=0.5%,则In最大为1 429A,对应6kV电动机约为12 500kW。即12 500kW及以下的电动机,磁平衡差动保护能较好地反映内部单相接地故障;而12 500kW及以上的大型电动机,通常均采用变压器-电动机组。因此,通常情况下,灵敏系数均满足要求。
总的来说,6kV或10kV中性点低电阻接地系统,磁平衡差动保护能够很好地反映电动机单相接地短路故障。出口动作于跳闸也符合规范要求。
4 建议
鉴于上述分析,石化企业高压电动机磁平衡差动保护的整定应根据具体的系统接地形式进行具体分析。
4.1 中性点不接地系统
只有当系统单相接地电容电流满足式(9)时,磁平衡差动保护才能够较好地反映出电动机单相接地短路故障。如满足此条件,可按式(2)进行整定。同时依据具体的工程要求,当单相接地故障不要求跳闸时,向继电保护厂家提出要求,将保护动作区间划分为两段:一段为Iset≤Iop<10A,保护动作出口报警;另一段为Iop≥10A,保护动作出口跳闸。
如果系统单相接地电容电流不满足式(9)时,可将磁平衡差动保护放弃保护电动机的单相接地故障,而由小电流选线等其他装置去完成电动机的单相接地故障保护。此时磁平衡差动保护用来保护电动机相间短路故障,其定值可设置为:
Iset=Kk·(IcΣ+Iimb)/nTA
(13)
这样,即可保证电动机启动、正常运行、外部短路时,磁平衡差动保护均不误动;而电动机内部发生相间短路时,能可靠动作于跳闸,满足实际运行需求。
4.2 中性点谐振接地
当系统单相接地电容电流(未补偿前)满足式(9)时,可按式(3)进行整定。但磁平衡差动保护必须与消弧线圈补偿联动,即系统单相接地故障时,消弧线圈补偿装置延时t1补偿;磁平衡差动保护装置瞬时动作出口报警(此时能够反映电动机具体哪一相发生了单相接地故障),延时t2(t2>t1)动作出口跳闸,保证电动机内部单相接地故障但失去消弧线圈补偿时,能可靠跳闸。
当系统单相接地电容电流(未补偿前)不满足式(9)时,即不管是消弧线圈补偿前还是补偿后,磁平衡差动保护均不能很好反映单相接地故障,建议按式(13)进行整定。此时磁平衡差动保护用来保护电动机相间短路故障。
4.3 中性点低电阻接地
可以按照式(3)进行整定,用来反映电动机单相接地故障,并出口跳闸。
另外,由于磁平衡差动保护的不平衡电流主要与流入和流出磁平衡差动互感器的电流位置不对称、电动机绕组的对地电容电流和TA本身磁路的不对称有关。各电动机不平衡电流存在一定的差异,而根据式(9),不平衡电流与磁平衡差动保护反映单相接地故障的电容电流阈值有很大的关联。因此,针对具体工程,建议先暂按Kp=0.5%进行整定,然后在现场实测磁平衡差动保护的不平衡电流,最后对保护进行相应的调整。
5 结束语
综上所述,现有可供参考的电动机磁平衡差动保护的整定方法在石化装置不同中性点接地系统中的适应性各不相同。整定时,建议对不同的中性点接地系统区别对待;有条件的,应实测不平衡电流对整定值进行修正。
[1] 李斌,范瑞卿,贺家李.电动机磁平衡式差动保护的整定计算[J].电力系统保护与控制,2010,38(13):79~82.
[2] 赵伦.电机磁平衡式差动原理与定值整定[J].电工技术,2014,(1):17,20.
[3] GB/T 50062-2008,电力装置的继电保护和自动装置设计规范[S].北京:中国计划出版社,2009.
[4] 王维俭,张学深.电气主设备纵差保护的进展[J].继电器,2000,28(5):6~8.
[5] 王维俭,李芙英.纵联差动保护原因不明误动的分析和对策——兼论光电流传感器的应用[J].电力系统自动化,1999,23(18):17~19.
[6] GB/T 50064-2014,交流电气装置的过电压保护和绝缘配合设计规范[S].北京:中国计划出版社,2014.
[7] SH/T 3060-2013,石油化工企业供电系统设计规范[S].北京:中国石化出版社,2013.
