AMR磁传感器横轴效应两种补偿方法的对比研究
2015-01-13张志宏
何 宏 冯 乐 张志宏,2
(1.天津理工大学自动化学院天津市复杂系统控制理论及应用重点实验室,天津 300384;2.天津广播电视台传输发射部,天津 300072)
现实生活中,针对车辆、飞机及行人等的定位都需要高精度的定位导航系统[1],为此需要将磁传感器与其他技术相结合,实现磁传感器在时间变化时依然具有良好的灵敏度、线性度和稳定性。常用的磁传感器有两种:各向异性磁阻(Anisotropy of Magnetoresistance,AMR)传感器与特大磁电阻(Giant Magneto Resistive,GMR)传感器。二者相比,GMR传感器在灵敏度上稍具优势,但GMR传感器具有高滞后性,而且在高强磁场中容易损坏。考虑到实时性和成本,具有灵敏度高、响应速度快及成本低等优势的AMR传感器更具推广价值。
AMR传感器在垂直于其灵敏轴方向被施加一定的加速度或者倾斜一定的角度,即横轴效应[2],测量期间,如果周围磁场发生改变,传感器的测量结果就会产生横轴误差。在此,通过对横轴效应的理论分析和磁能相关公式的推导,对AMR传感器横轴误差的旋转补偿方法和非旋转补偿方法进行对比。
1 AMR传感器的横轴效应①

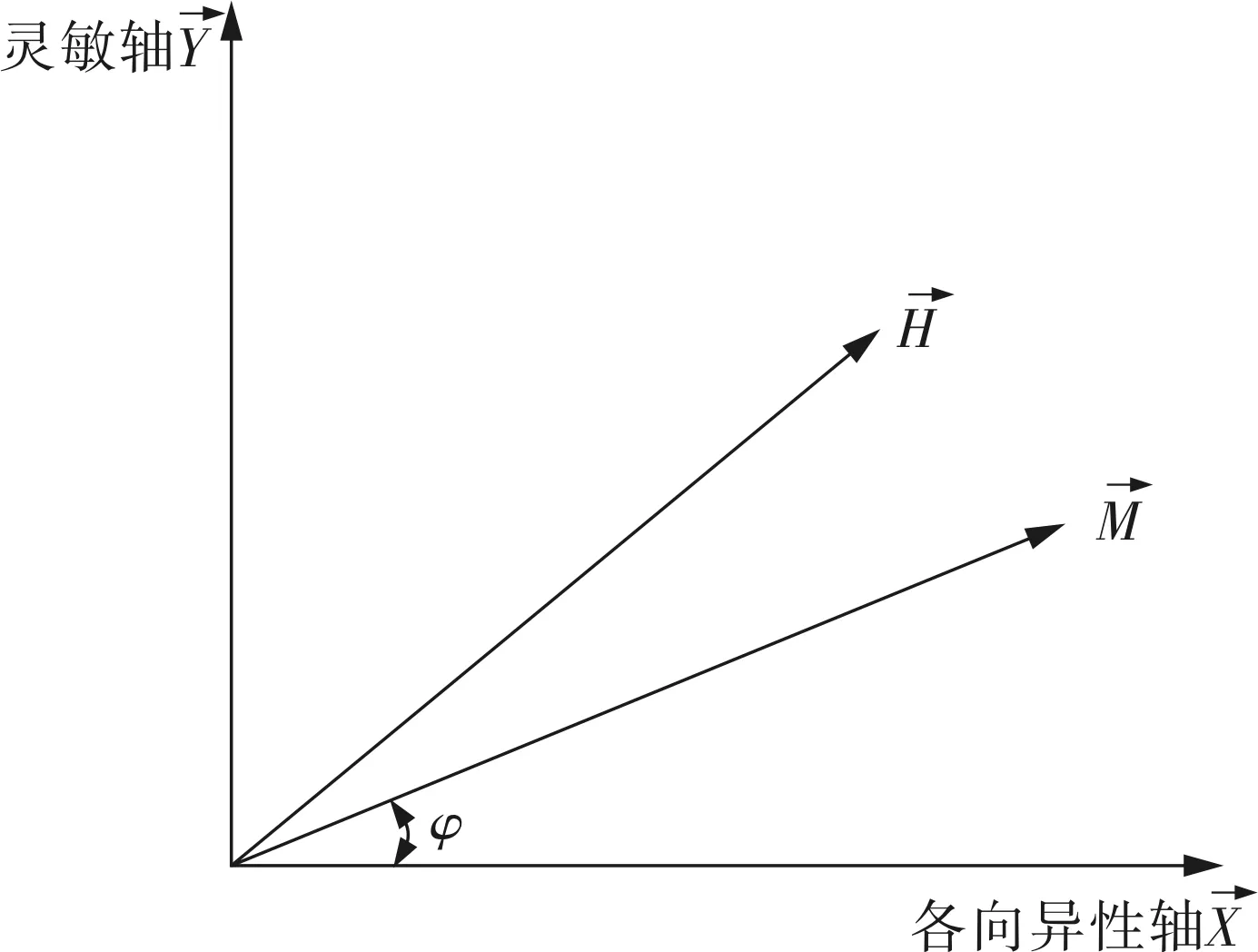
图1 AMR传感器磁化矢量与外磁场矢量的关系
铁磁层的磁场能量E可以表示为:
E=1/2μ0MsHksin2φ-μ0Ms(Hysinφ+Hxcosφ)
(1)

磁性材料的各向异性能量取决于磁晶体内部磁化矢量的方向,这种能量指的是磁晶体中不受外界影响而形成的那些磁化的能量,其中角度φ由最小磁能给出:

(2)
由式(1)、(2)可得:
Hksinφcosφ=Hycosφ-Hxsinφ
假设φ≪1,则有sinφ≈φ、cosφ≈1,那么式(2)即变换为:
(3)
式(3)表明,如果外磁场应用于传感器的敏感轴方向Hy,磁化矢量会自动旋转,由于这种旋转,随着角度的变化镍铁合金层的阻值也会随之改变,如果外部领域在各向异性的方向上也有分量,这与式(1)中的静磁能μ0MsHxcosφ相关,它也会影响角度φ,因此测量结果是在变化的,这种现象被称为横轴效应,当一个强磁场作用于正交敏感轴方向时,就会变成重大问题。最后,阻值随外部磁场变化而变化,即:
(4)
式中RH=0——无干扰区域的阻值;
ΔR——最大阻值的变化量。
应用螺旋条纹状结构,45°是为了传感器输出有更好的线性响应,经常人为地增加角度,因此式(4)可变化为:
(5)
式(5)已经被单一的镍铁导磁合金验证过了,用4个电阻组成一个惠斯通电桥,由恒定电流供电,得到一个输出电压:
(6)
此处,a是一个影响传感器敏感度的参数,且有:
由于Hk≫Hx、Hy,则式(5)可简化为:
(7)
根据对AMR传感器的原理和横轴误差的简要阐述,下面将利用式(6)、(7),通过旋转补偿法和非旋转补偿法分别推导补偿值。
2 地球磁场中的横轴数值补偿法
笔者提出非旋转补偿法和旋转补偿法两种方法[4],由于参数a的未知性和不可测量性,此处采取实际值与理想值的比例形式消去参数a,从而得到一个简单的公式,以便补偿横轴误差。
2.1 非旋转补偿法
为了补偿传感器横轴的影响,此处将用到式(6)。先假设:
则式(6)变为:
即:
(8)
(9)
应该注意,a和Hk是常数。现在,提出一个没有横轴误差的AMR传感器,这种理想的AMR传感器的输出电压是不依赖于正交场的(Hx=0)。因此,式(9)可变为:
(10)
为了消除式(10)的敏感性,将式(9)与式(10)相除以消除参数a:
即:
2.2 旋转补偿法
旋转法也称为set/reset法,它对于改善AMR传感器的性能有着较好的效果[5]。传感器内部的集成线圈被用于创造两个连续不断且方向相反的强磁场,这个磁场的产生是由于线圈中交替的正负脉冲电流,磁场内的每个脉冲都被置于相反的磁场区域,这样在这个区域内均被相反的磁场磁化。当使用旋转补偿法时,输出信号(VoutSR)是每个磁化方向磁场的平均值:
根据式(7),考虑用Hk和-Hk分别对应set和reset,则VoutSR也可以写成:
(11)
在没有正交场,传感器线性测量时式(11)变为:
(12)
利用式(11)、(12)之比的结果就可以得到补偿值:
(13)
3 两种方法的对比分析
应用HMC5883 ARM传感器对同一位置的地磁场进行测量。应用非旋转补偿法和旋转补偿法补偿前后磁场的变化分别如图2、3所示[6],可以清晰地看出,未经补偿的磁场变化明显,补偿后的变化则显著趋于平稳。
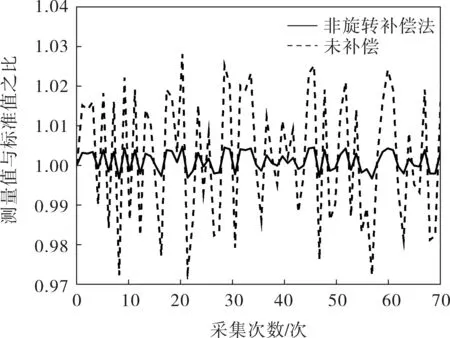
图2 非旋转补偿法补偿前后磁场变化

图3 旋转补偿法补偿前后磁场变化
表1给了出旋转补偿法和非旋转补偿前后对比的部分数据,可以清晰地看到旋转补偿法偏差约为0.002,而一般补偿法约为0.004。很明显,旋转补偿法的精度比非旋转补偿法的精度提高了将近一倍。

表1 两种方法补偿前后部分数据的对比
4 结束语
由于受地球自转等多种外部因素的干扰,三轴各向异性磁电阻(AMR)磁传感器存在横轴效应,导致测量结果也实时变化,这对磁阻传感器的测量精度影响极大。为此,笔者对磁传感器理论和横轴误差进行了深入研究,通过理论分析与公式推导,提出旋转补偿法和非旋转补偿法两种方法。然后将二者的补偿后的横轴偏差进行对比分析后,得出旋转补偿法的精度比非旋转补偿法的精度提高了近一倍的结论。
[1] 张从力,苏宏锋.基于最优路径的无线语音泊车诱导系统研究[J].自动化技术与应用,2013,(2):61~67.
[2] 王昕,王静怡.隧道磁电阻技术在电力系统传感测量中的应用[J].科技传播,2014,(7):196~197.
[3] 石文敏,刘静,郑泽林.3.0% Si无取向硅钢磁各向异性的研究[J].武汉工程职业技术学院学报,2012,(2):4~7.
[4] Mohamadabadi K,Hillion M.An Automated Indoor Scalar Calibration Method for Three-Axis Vector Magnetometers[J].IEEE Sensors Journal,2014,14(9):3076~3083.
[5] 吕海洋.基于GMR传感器的无线车辆检测系统研究与设计[D].杭州:杭州电子科技大学,2013.
[6] Mohamadabadi K,Coillot C,Hillion M.New Compensation Method for Cross-Axis Effect for Three-Axis AMR Sensors[J].IEEE Sensors Journal,2013,13(4):1355~1362.
