超混沌系统的反同步研究
2015-01-13李贤丽张超颖窦雪莹
李贤丽 张超颖 窦雪莹
(东北石油大学,黑龙江 大庆 163318)
混沌运动是发生在确定的非线性系统中的一种随机行为,其对初始条件高度敏感,具有复杂的动力学性质,且难以预测,目前广泛地应用于物理学、地质学、生物学、化学及保密通信[1]等工程领域中。混沌在发现之初是用来解释某些自然和物理现象的,如蝴蝶效应及天气预报等。近年来,人们开始控制和应用混沌,混沌控制的主要方法有线性反馈法[2]、周期扰动与激励控制[3]、参数扰动法。基于混沌控制的方法,在一定条件下,构造出四维自治超混沌系统,超混沌系统与混沌系统相比具有更为复杂的动力学行为,它具有两个或两个以上正的李雅普诺夫指数,拓扑结构更为复杂,动态行为更加难以预测,更难被破解。将超混沌同步技术应用于保密通信系统时,有着更强的保密性能。混沌信号应用于保密通信是要把有用信号隐藏在混沌信号里,再在接收端提取出有用信号,可以直接利用混沌通信,也可以利用混沌同步实现通信,所以对超混沌同步方法的研究也极为重要。混沌同步是混沌控制的一种特殊形式,混沌系统的同步类型有完全同步、投影同步、反同步[4,5]及相同步[6]等,混沌同步方法有自适应同步法[7]、反馈同步法[8]、基于状态观测器广义投影同步法[9]和脉冲同步法[10]。
笔者针对超混沌liu系统,采用基于状态观测器法和反馈法设计合适的观测器和控制器,从理论分析和数值计算两个角度出发,研究超混沌系统在不同初始值条件下的反同步问题。同时,通过同步曲线和误差曲线,比较两种方法的不同之处。
1 基于状态观测器法实现反同步①
超混沌系统具有两个正的李雅普诺夫指数,与三维混沌系统相比具有更加复杂的拓扑结构,所以其动力学性质也更为复杂。笔者选取一个超混沌liu系统[11],其系统方程为:
(1)
其中,a=35,b=35,m=2,c=2,d=10。
首先,采用基于状态观测器的方法来实现liu系统自身的反同步。把系统(1)作为驱动系统并化为f(x)=Ax+Bg(x)+G的形式。驱动系统为:
(2)
其中,A、B、G、D为定常矩阵:


G=0
根据状态观测器理论,响应系统可表示为:
(3)
响应系统中的α为投影同步中的比例系数,为了使A-BD的特征值为负实部,取特征值为(-0.5,-1,-1.5,-2),运用极点配置法得到矩阵D:
此时的响应系统为:
(4)
所谓反同步就是指混沌系统运动轨道的振幅大小相等、方向相反。因此,令比例系数α=-1,系统(1)的初始值为(2,20,35,-2),系统(3)的初始值为(12,30,50,40),利用Matlab进行数值仿真得到结果,此时驱动系统(1)和响应系统(3)实现了反同步,其系统的反同步曲线和反同步误差如图1、2所示。由图2可知,系统的误差e1、e2、e3、e4随着时间的增加逐渐趋于零点,也就是驱动系统和响应系统达到了反同步。
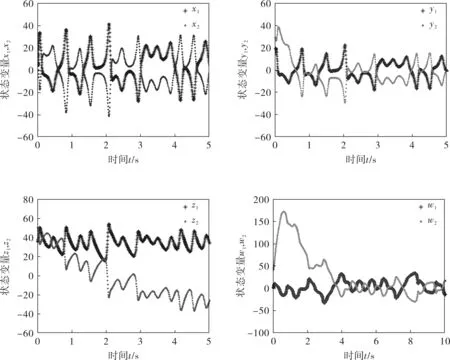
图1 驱动-响应系统中的各状态变量的反同步曲线

图2 驱动-响应系统的反同步误差曲线
2 反馈法实现反同步
同样选取系统(1)作为驱动系统,那么,其同结构加了控制器后的响应系统为:
(5)
其实U=(u1,u2,u3,u4)T即将要设计的控制器。
将系统(1)和系统(5)相加,得到误差动态系统为:
(6)
其中e1=x1+x2,e2=y1+y2,e3=z1+z2,e4=w1+w2,设计合适的控制器U=(u1,u2,u3,u4)T,将驱动系统(1)和响应系统(5)实现反同步。
以非线性控制理论为依据,设计控制器U为:
(7)
由式(6)、(7)可将误差系统转化为如下形式:
(8)
取李雅普诺夫函数为:
(9)
对式(9)取导数为:

=e1[a(e2-e1)+μ1]+e2(be1-me4+μ2)+
e3(-ce3+μ3)+e4(de2+μ4)

(10)
则可得:

令驱动系统(1)的初始值为(2,20,35,-2),响应系统(5)的初始值为(12,30,50,40),运用四阶Runge-Kutta法在Matlab中进行数值仿真,从而得到系统的反同步曲线和反同步误差曲线如图3、4所示。
由图2可知,当t=12.8s时,基于状态观测器法得到的同步误差曲线趋于零点。由图4可知,当t=3.0s时,反馈法得到的误差曲线趋于零点,由此可知,对于一般系统而言,采用反馈法来实现系统的同步,虽然控制器设计复杂,但是同步速度较快。
3 结束语
根据状态观测器理论和李雅普诺夫定理,采用基于状态观测器法和反馈法分别设计了观测器和控制器,对liu系统的反同步进行了理论论证,同时,利用Matlab对该系统进行数值模拟得到了系统的反同步曲线和反同步误差曲线,验证了两种方法的可行性和有效性。基于状态观测器的方法具有算法简单、计算量小的优点,与其相比,通过反馈法实现的系统同步,虽然控制器的设计较为复杂,但其同步速度相对较快,更适用于保密通信。

图3 驱动-响应系统中的各状态变量的反同步曲线

图4 系统的反同步误差曲线
[1] 李瑞红,陈为胜,李爽.超混沌Lorenz系统的投影同步及其在保密通信中的应用[J].电路与系统学报,2011,16(2):41~45.
[2] 李贤丽,王升,张秀龙,等.四翼混沌吸引子系统控制[J].大庆石油学院学报,2011,35(4):117~122,14.
[3] 李贤丽,张笑宇,王升,等.Lorenz超混沌系统的周期扰动与激励控制[J].大庆石油学院学报,2010,34(4):105~109,131.
[4] Chen J Y,Wong K W,Cheng L M,et al. A Secure Communication Scheme Based on the Phase Synchronization of Chaotic Systems[J].CHAOS,2003,13(2):508~514.
[5] 王兴元.混沌系统的同步及在保密通信中的应用[M].北京:科学出版社,2012.
[6] Tam W M,Lau F C M,Tse C K.Analysis of Bit Error rates for Multiple Access CSK and DCSK Communication Systems[J]. IEEE Transactions on Circuits and Systems I:Fundamental Theory and Applications,2003,50(5):702~707.
[7] 单梁,刘光杰,李军,等.Liu混沌系统的线性反馈和状态观测器同步[J].系统仿真学报,2007,19(6):1335~1338.
[8] Hu M F,Xu Z Y,Zhang R,et al.Adaptive Full State Hybrid Projective Synchronization of Chaotic Systems with the Same and Different Order[J].Physics Letters A, 2007,365(4):315~327.
[9] Zhang G, Liu Z R,Ma Z J.Generalized Synchronization of Different Dimensional Chaotic Dynamical Systems[J].Chaos,Solitons and Fractals,2007,32(2):773~779.
[10] 马铁东,江伟波,浮洁.基于比较系统方法的分数阶混沌系统脉冲同步控制[J].物理学报,2012,61(9):39~44.
[11] 高智中,王颖.一个新超混沌系统及其线性反馈控制[J].数值计算与计算机应用,2012,33(3):167~172.
