UKF 车速估计器的算法研究与仿真
2015-01-12解小华蔡可天孟凡坤
芦 冰,解小华,蔡可天,孟凡坤
(吉林大学a.汽车仿真与控制国家重点实验室;b.通信工程学院,长春130022)
0 引 言
当今汽车产业快速发展,人们对车辆安全也越来越重视,提高车辆安全性的重要前提就是对车辆真实速度进行估计。目前关于车速的估计方法有很多种,如卡尔曼滤波(KF:Kalman Filter)、扩展卡尔曼滤波(EKF:Extended Kalman Filter),粒子滤波法,无味卡尔曼滤波(UKF:Unscented Kalman Filter)等。其中KF是诸多状态估计方法中的一个重要方法,是现代滤波技术的一种状态估计手段。目前,这种状态估计的方法被广泛应用于航空系统、导航定位、目标跟踪以及汽车制造业等领域[1]。但由于现实系统往往都带有或强或弱非线性特性,为解决该问题,科研工作者在KF的基础上相继研究出扩展卡尔曼滤波法,但EKF算法计算量较大、应用范围有限,只适用于可导函数,且在强非线性和非高斯环境下跟踪性能较差,甚至会出现滤波发散[2]。粒子滤波器在复杂的非高斯非线性环境中的性能明显优于EKF,但计算复杂、耗时长,而无味卡尔曼滤波方法可直接利用非线性模型,从而避免了非线性误差,滤波精度有了较明显提高[3]。
车辆在行驶中轮胎发生形变会使轮胎半径产生偏移,使车辆的实际速度与测量速度出现偏差,在此定义参数ζ为车辆速度的滑移率,并将其加入到状态方程和观测方程中。笔者在建立状态方程和速度方程的过程中,除了考虑车辆的实际加速度和测量加速度,还将影响车速估计精度的加速度噪声加入到状态方程和速度方程中,并与KF滤波算法进行比较,验证了基于UKF算法车速估计器的先进性。
1 车辆模型
七自由度车辆数学模型如图1所示。该模型忽略车辆的侧倾运动,得到一个包含纵向、横向、横摆以及4个车轮的七自由度数学模型。在车辆模型中,车辆在x方向的速度vx和y方向的速度vy为系统的状态信息,即定义系统的状态为x=[vxvy]T;车辆的纵向加速度ax和ay为系统的测量信息,即定义系统的输出y=[axay]T;系统的输入为前轮转角δ,其中vx=ax+γvy表示坐标系x方向的汽车速度,vy=ay-γvx表示坐标系y方向的汽车速度。
测量方程为

图1 七自由度车辆模型Fig.1 Seven-DOF vehicle mode
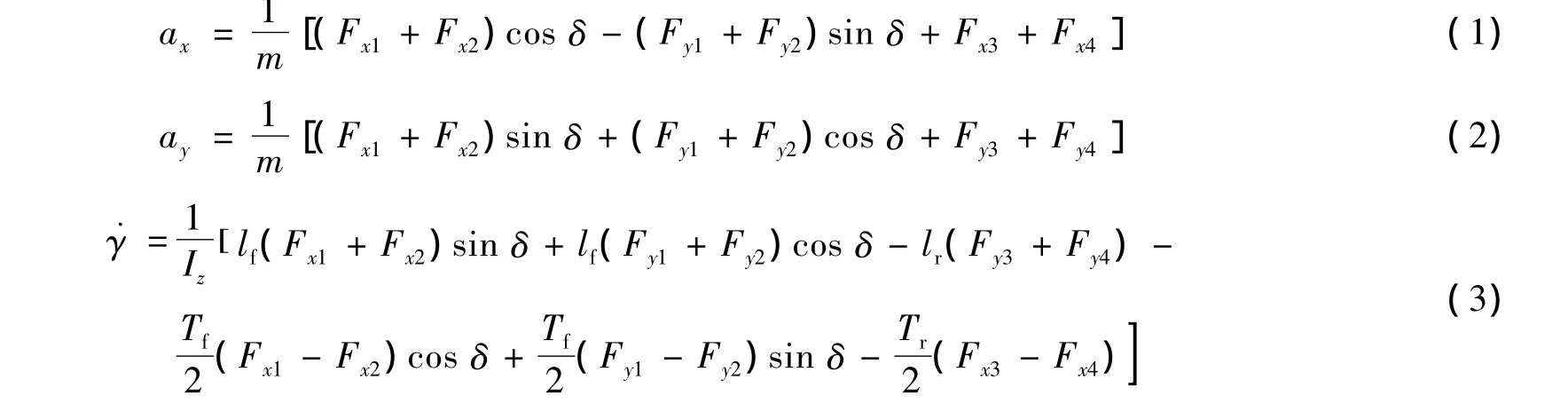
其中m为汽车总质量,γ为汽车横摆角速度,δ为前轮输入转角,Tf为前轮制动力矩,Tr为后轮制动力矩,Fxi为全部外力在x轴方向投影的代数和,Fyi为全部外力在y轴方向投影的代数和[4]。笔者将过程噪声协方差设定为,测量噪声协方差设定为
2 UKF算法的原理
2.1 UKF算法的流程
假定存在一个非线性系统,系统的状态方程和观测方程分别为


2)Sigma点的计算。当k=1,2,…,∞时,sigma点的选取

其中n为系统状态方程的维数,λ为比例参数[5]。
3)时间更新。状态方程的参数

其中χk/k-1为经过状态方程变换后的sigma点,^x为加权后的预测均值,P-k为加权后状态预测方差,Q为过程噪声。
时间更新测量方程的参数

其中ζk/k-1为经过观测方程变换后的sigma点,^yk为系统观测变量加权后的预测值。
4)测量更新。测量方程的协方差

状态变量和测量变量的互相关矩阵

2.2 系统方程的确定
车辆在行驶时,轮胎发生形变、轮胎半径产生偏移,使车辆的实际速度与测量速度出现偏差,在此定义参数ζ为车辆速度的滑移率

其中vm为车辆测量速度,w为轮胎角速度,r为车辆轮胎的自由半径,由式(12)可推导出车辆的实际速度

在车辆系统中,笔者选取状态变量为实际速度和加速度,即x=[vtat]T,观测变量为测量加速度和滑移率,即 y=[amζ][8]。
假设车辆在t时刻速度为vt,测量的加速度为am,则Δ t后,车辆的速度

车辆的实际加速度

加入一个新的影响因素加速度噪声na,车辆系统的状态方程[9]为

将加速度和式(12)作为观测方程,可得车辆系统的观测方程为

将式(14)和式(15)离散化,取离散时间 τ =0.2 ms,可得[10,11]


因为在车辆系统中,由轮胎偏移而产生的滑移率很小,且不易测量,所以ζ的测量值设定为一个常数0.01。在UKF车速估计器中,ζ将与观测值做差,调节系统的状态变量的误差。初始速度和加速度,根据不同工况而设定,在这里设定状态变量的初始协方差矩阵为
3 Matlab仿真与分析
为验证UKF算法的估计效果,设计了两组仿真实验。
实验1 仿真条件:角阶跃线输入工况下,初始速度v=16 m/s,初始加速度a=-8 m/s2,方向盘转角为δ(相当于轮胎转角)。实验结果如图2所示。

图2 实验1仿真结果Fig.2 The simulation results of experiment 1
由图2可以看到,0.5 s以后UKF和KF估计器都有较好的速度跟踪,但UKF明显比KF的估计值更接近真实值。从第2 s开始,速度发生变化时,UKF估计值与真实值的绝对误差约为0.25 m/s,而KF的估计值与真实值的绝对误差约为0.75 m/s。
实验2 仿真条件:角阶跃线输入工况下,初始速度v=22 m/s,初始加速度a=-6 m/s2,方向盘转角为δ,相对于第1组实验有所增大(相当于轮胎转角)。实验结果如图3所示。

图3 实验2仿真结果Fig.3 The simulation results of experiment 2
由图3可以看到,当方向盘输入为角阶跃时,UKF算法和KF算法的车辆速度估计值在初始时刻都有较大误差,其中KF算法的误差在初始时刻达到9 m/s。因为影响KF初始准确性的因素很多,如模型参数Q、R以及卡尔曼滤波器的初始条件^x(0)、P(0)的选取都会影响状态估计精度和收敛速度。2 s后UKF和KF估计器都能较好地跟踪实际速度,但UKF明显比KF的估计值更接近真实值。从第2 s开始,UKF估计值与真实值的绝对误差约在0.4 m/s左右,而KF的估计值与真实值的绝对误差约在1.0 m/s左右,此时的速度从20 m/s下降到10 m/s以下。可以看出,UKF算法的估计值与真实值的绝对误差率始终保持在4%以内,与KF算法比较,其估计值的绝对误差率提高约3%。
4 结 语
笔者设计一种基于UKF算法的车速估计器,首先测量车辆模型的方向盘转角、加速度和角加速度的值,之后借助七自由度整车模型,估计车辆质心的速度、加速度等信息,并加入可能会影响车速估计精度的滑移率ζ和加速度噪声na。通过与KF算法车速估计器仿真图的对比结果表明,UKF估计器对车速的跟踪速度比KF估计器快,精确度更高。每当系统输入产生突变时,车速的估计值与真实值的偏差将会变大,这是系统的非线性所引起的,但UKF算法估计值与真实值的绝对误差率始终保持在4%以内,比KF算法估计值的绝对误差率提高约3%,能更好地预测车速变化的趋势、更快地跟踪估计参数,且估计误差在可接受的范围内。
[1]王学斌,徐建宏,张章.卡尔曼滤波器参数分析与应用方法研究[J].计算机应用与软件,2012,29(6):212-215.WANG Xuebin,XU Jianhong,ZHANG Zhang.On Analysis and Application Approach for Kalman Filter Parameters[J].Computer Applications and Software,2012,29(6):212-215.
[2]PAN Zhao,ZONG Changfu,ZHANG Jiahao,et al.UKF and EKF Estimator Design Based on a Nonlinear Vehicle Model Containing Uni-Tire Model[C]∥International Conference on Mechatronics and Automation.Changchun,China:IEEE,2009:4780-4784.
[3]LI Jie,ZHONG Yanru.Comparison of Three Kalman Filters for Speed Estimation of Induction Machines[C]∥Industry Applications Conference.[S.l.]:IEEE,2005,3:1792-1797.
[4]LIAN Xi,XIE Xiaohua,MENG Fankun.Research on Vehicle Speed Estimation Algorithm Based on AMESim Platform[C]∥24th Chinese Control and Decision Conference(CCDC).Taiyuan,China:IEEE,2012:3039-3044.
[5]JAFARZADEH S,LASCU C,FADALI M S.State Estimation of Induction Motor Drives Using the Unscented Kalman Filter[J].Industrial Electronics,2012,59(11):4207-4216.
[6]刘铮.UKF算法及其改进算法的研究[D].长沙:中南大学信息科学与工程学院,2009:10-19.LIU Zheng.Research of UKF Algorithm and Its Improved Algorithm[D].Changsha:Institute of Information Science and Engineering,Central South University,2009:10-19.
[7]LU Jian,XU Demin,ZHANG Lichuan,et al.Simulation Study for Observation of Space Reentry Vehicles Based on UKF[C]∥2011 International Conference on Network Computing and Information Security(NCIS).Guilin,China:IEEE,2011:410-414.
[8]KOLÅS S,FOSS B A,SCHEI T S.Constrained Nonlinear State Estimation Based on the UKF Approach[J].Computers&Chemical Engineering,2009,33(8):1386-1401.
[9]WAN E A,VAN DER MERWE R.The Unscented Kalman Filter for Nonlinear Estimation[C]∥Adaptive Systems for Signal Processing,Communications and Control Symposium.Lake Louise,Alta:IEEE,2000:153-158.
[10]张丽丽,王玉惠,孔繁峨,等.基于UKF的战术数据链通信延时与补偿算法[J].吉林大学学报:信息科学版,2012,30(6):561-568.ZHANG Lili,WANG Yuhui,KONG Fane,et al.Algorithm Based on UKF of Delay Time Compensation for Tactical Data Link[J].Journal of Jilin University:Information Science Edition,2012,30(6):561-568.
[11]赵又群,林棻.基于UKF算法的汽车状态估计[J].中国机械工程,2010,21(5):615-619.ZHAO Youqun,LIN Fen.Vehicle State Estimation Based on Unscented Kalman Filter Algorithm [J].China Mechnical Engineering,2010,21(5):615-619.
[12]张永生,初亮,时艳茹,等.基于UKF滤波算法的汽车质心速度估算[J].吉林大学学报:工学版,2010,40(增刊):85-90.ZHANG Yongsheng,CHU Liang,SHI Yanru,et al.Vehicle Velocity Estimation Based on Unscented Kalman Filter[J].Journal of Jilin University:Engineering and Technology Edition,2010,40(S1):85-90.
[13]许迅雷.无迹卡尔曼滤波(UKF)的应用比较分析[J].西安文理学院学报:自然科学版,2011,14(2):57-60.XU Xunlei.A Comparative Analysis of Unscented Kalman Filter(UKF)[J].Journal of Xi'an University of Arts& Science:Nature Science Edition,2011,14(2):57-60.
