基于Pro/E的挖掘机工作装置建模与运动仿真分析*
2015-01-10周莉
周 莉
(沙洲职业工学院,江苏张家港 215600)
基于Pro/E的挖掘机工作装置建模与运动仿真分析*
周 莉
(沙洲职业工学院,江苏张家港 215600)
在对挖掘机工作装置的设计过程进行分析的基础上,应用三维软件Pro/E创建挖掘机工作装置的三维模型;然后利用Pro/E的Mechanism模块对设计的3D模型作运动学仿真分析,同时检查各个零部件之间的干涉情况,从而得到工作装置的运行轨迹;根据得到的分析结果对工作装置的结构尺寸进行优化设计,从而得到优化后的工作装置3D模型,为实现该工作装置的物理样机提供了技术支持。
Pro/E;挖掘机工作装置;三维建模;运动仿真及分析
0 引 言
挖掘机是工程机械的主要机种之一,被广泛应用于国防施工、农田水利、矿山开采、道路工程等基本建设之中。随着我国经济建设的迅速发展,尤其是国家加大铁路、公路、水利设施和住宅的投资,挖掘机在国民经济建设中的重大作用逐步体现出来。据统计,露天矿山中79%的剥离量和采掘量,一般工程施工中约有59%的土方量都是用挖掘机来完成的[1]。
随着我国基础设施建设的深入和在建设中挖掘机的广泛应用,挖掘机的市场有着很大的发展空间,因此开发满足我国国情所需要的挖掘机是非常有必要的。工作装置作为挖掘机重要组成部分,其性能优劣不仅直接影响挖掘机的生产效率,还决定整机的可靠性。但是影响挖掘机工作装置的因素比较多,传统的设计方法耗费时间长、工作量很大,不容易得到令人满意的结果。为了缩短产品开发周期,减少挖掘机设计人员的工作量,提高设计质量,研究挖掘机工作装置的CAD技术是很有必要的[2]。
1 挖掘机工作装置设计流程
挖掘机工作装置大致有机座、转台、主臂、前臂、导向槽、导向杆、挖斗等几部分。首先设定各零件参数,然后运用软件Pro/E创建挖掘机工作装置的三维模型,应用Pro/Mechanism模块对创建的工作装置3D模型作运动仿真分析,并检查各零部件之间的干涉情况,得到工作装置的运行轨迹,根据得到的分析结果对工作装置的结构尺寸作优化设计,从而得到优化后的工作装置3D模型,整个设计思路如图1[3]。
2 创建挖掘机工作装置3D模型
2.1 模型构建原则
一个繁杂的机械系统做运动仿真时,首先应该对原有的结构体系做适当地简化。在简化模型时应该遵守两个原则:①简化之后的模型仍然能够表达出原有结构的力学性能;②应该尽可能简化,这样计算起来比较方便。根据这两条原则,简化模型时需要注意以下几点:①过渡圆角和倒角应该简化成直角;②对称与反对称的利用;③相互连接体。
2.2 挖掘机工作装置三维模型创建
在Pro/E里完成零件绘制后,就开始进行装配,建立挖掘机工作装置的整体3D模型,如图2所示。建立工作装置3D模型可分为以下几个步骤。
第1步:装入机座、转台,并创建机座与转台之间的连接。
第2步:装入主臂、前臂、主导向槽,并创建主臂与转台、主臂与前臂、主臂与主导向槽之间的连接。
第3步:装入主导向杆,并创建主导向杆和前臂、主导向杆与主导向槽之间的连接。
第4步:装入挖斗,并创建前臂和挖斗之间的连接。
第5步:装入挖斗前连接片、一块挖斗后连接片,并创建前连接片与挖斗、前连接片与后连接片、后连接片与前臂之间的连接。
第6步:装入前导向槽、前导向杆,并创建前导向槽和前臂、前导向杆和前导向槽、前导向杆和挖斗前连接片之间的连接。
第7步:装入第二块挖斗前连接片,并创建第二块前连接片与挖斗、第二块前连接片与前导向杆之间的连接。
第8步:装入第二块挖斗后连接片,并创建第二块挖斗后连接片与第二块前连接片、第二块挖斗后连接片与前臂之间的连接。

图1 挖掘机工作装置设计流程图
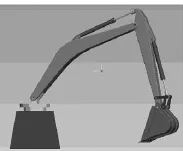
图2 挖掘机工作装置的三维模型
3 挖掘机工作装置运动仿真分析
3.1 多驱动器开环机构
当一个机构同时具备两个以上自由度,而且每个自由度间不能构成一个完整的闭环机构,就像机器人一样,不仅有多个关节,而且还有多个动力源(伺服电机)时,称这类机构为多驱动器开环机构。挖掘机工作装置就属于这种多驱动器开环机构。这类机构在Pro/E运动仿真中是最困难的一类,因为在仿真过程中需要设置多个动力源(伺服电机),还需要多次调整各个动力源(伺服电机)间的运动关系,这样机构才能运行正常[4]。
3.2 多驱动器动力源的设置
多驱动器开环机构的核心部分是创建驱动器并调整每个驱动器之间的运动顺序,这部分的建立直接影响到整个机构的仿真逼真程度。在挖掘机工作装置中,总共设定四个驱动器。
如图3所示为第一台伺服电机设定的步骤。
STEP1:在伺服电动机类型中选如图3(a)中转台连接轴作为伺服电动机的驱动对象。选择完毕后,模型中显示一个紫色箭头,表示运动方向。
STEP2:在伺服电动机的定义对话框中设置好时间与模的关系后就会得到伺服电动机的位置与时间的函数关系,如图3(b)、(c)所示。
STEP3:完成伺服电动机的设置后,选择机构分析按钮,再点运行按钮,机构将进行运动仿真。
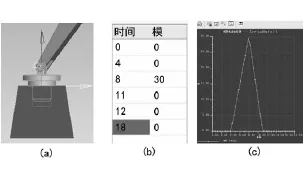
图3 伺服电动机1的设置
根据第1台伺服电动机的设定步骤,对第2~4台伺服电动机分别进行设置,设置步骤大致与第1台伺服电动机的设定步骤一致,区别在于设定第2台伺服电动机时,选择主臂与转台之间的连接轴为驱动对象;设置第3台伺服电动机时,选择前臂与主臂的连接轴为驱动对象;设定第4台伺服电动机时,选定前臂和挖斗之间的连接轴为驱动对象。
3.3 挖掘机工作装置的运动仿真
设定四个伺服电动机的参数后,对挖掘机工作装置进行运动仿真,并利用运动仿真的结果进行分析,检验各零件之间是否有干涉,直到不产生干涉为止。用图形来表示顶点或机构中某一点相对于零件的运动轨迹,挖掘机工作装置中在挖斗上选择一点,可以得到该点随时间的位移曲线,如图4所示。
Kinematics Simulation Analysis of Excavator W orking Devices Based on the Pro/Engineer
ZHOU Li
(Shazhou Vocational College of Technology,Zhangjiagang Jiangsu 215600,China)
Based on analysis for the design process of excavator working devices,3-dimentionalmodel of the excavator working device is built bymeans of software Pro/E.And then kinematics simulation analysis for the 3-Dmodel is conducted with the Pro/Mechanism,meanwhile,the interference condition among its parts is checked,thus the motion trajectory of working device is obtained.According to the analysis results,optimization design to the structure size of working device is completed so as to obtain a rational3-dimentionalmodelofworking device,which could provide technique support for realizing the physical prototype ofworking device.
Pro/E;excavator working device;3-D modeling;motion simulation and analysis
TP391.9
A
1007-4414(2015)06-0001-02
10.16576/j.cnki.1007-4414.2015.06.001
2015-09-28
周 莉(1984-),女,江苏徐州人,硕士研究生,工程师,研究方向:机械设计制造及自动化。
