航测控制网中GPS的应用分析
2015-01-10王晶
王晶
(广州大学市政技术学院 广东广州 510000)
航测控制网中GPS的应用分析
王晶
(广州大学市政技术学院 广东广州 510000)
GPS作为现代社会的一项新的测量技术,其具备精度高、速度快、费用低等优势,GPS布网也不存在常规交通规则的阻碍,因此,其已逐渐成为高等级城市控制网的主要技术手段。现阶段,GPS在我国的低航测控制网中被广泛的应用。因此,本文简单分析航测的内涵,并详细研究了低航测控制网中GPS的应用。
航测;控制网;GPS
引言
随着科学技术的快速发展,航测技术也越来越成熟,并得到了广泛的应用。而GPS技术因具有精度高、经费省等优势,并作为20世纪的一项高新科技,已得到许多领域的高度使用。在低航测控制网中运用GPS技术,可以有效保证测量的准确性和先进性。
1 航测的概述
所谓航测,就是摄影测量与遥感的有效结合,是一种测绘科学分类中的遥感科学,而遥感科学与技术是在空间科学、地球科学等众多科学领域基础上,交叉渗透、相互融合而得以发展的一项新兴边缘学科。航测是通过利用非接触传感器来获取相关目标的时空信息的。航测不仅可以帮助解决传统目标的几何定位,还可以在语义或非语义的角度对利用空间传感器获取的影像和非影像信息进行解释,进而获得客观世界中各种类型的目标对象的几何与物理特征信息,其不仅为人们认识和改造自然提供了良好的科学基础和方式,还为国家或部门间的重大决策和可持续发展提供了科学依据及决策保障,甚至为国防建设和国家安全提供可视化的军事情报服务。航测以其独特的科学性、技术性、服务性等被广泛应用于经济的建设、国家的安全和人们的正常生活等方面。
2 GPS与GPS控制网
GPS即为全球卫星定位系统,其是一种利用人造卫星发射的无线电信号进行导航和定位的系统,其可以对地面点的三维坐标进行高精度、全天候、快速的测定,推动了传统测量方式的改革,加快了测绘科学现代化的步伐。
高精度GPS静态定位通常运用于建立各种规模和级别的大地控制网、地球动力学监测网和精密工程测量网。通过利用GPS技术来完成对上述网的测定工作时,一般具备以下特点:①高精度三维定位。GPS点是通过GPS卫星信号直接获取有关信息的,因此,各点之间不存在逐点推算和误差积累。其点位的精度不仅比常规大地测量要高,而且精度均匀。②设计和布点方便灵活。GPS定位精度和GPS点的几何图形是不存在任何联系的,且其不同于经典的大地网。GPS定位精度不会受制于地面点间相互通视,从而使得控制网图形设计和点间距离不受限制,选点较为灵活方便。③对地理条件及作业条件的要求低。无论是在沙漠、高山,还是在孤岛、礁滩,都可以进行GPS定位观测。④费用低廉。GPS点位不需要建立觇标,所以,整个GPS测量的费用只有常规大地测量所需经费的1/3。⑤工作效率高。GPS观测不存在气象的限制,这是常规手段所无法比拟的。
3 低航测控制网中GPS的应用
3.1 控制点的布设及埋石
①在对控制点选点时,每个点至少要和一个相邻点通视,并照顾四等水准施测和以后的使用。②选择的点位要方便安置GPS接收设备和操作、视野开阔、基础稳固,且点位要选在能够进行长期保存的地区。③GPS点位要远离大功率发射源200m以上,同时,要避开高压输电线50m以上。④GPS点位不存在强烈干扰接收卫星信号的事物。⑤四等GPS点的埋设要根据甲方提供的相应标识进行。⑥埋石点要进行实地绘制点的标记,并用普通相机拍照,并且要将埋石点和附近的相关事物都突显出来,然后再在点位附近的位置设置带编号的牌匾。拍完的照片要在整理之后按照一定的顺序装入像册。
3.2 平面控制测量
平面控制测量通常采用GPS技术进行,其等级为一级。
3.2.1 埋石点的GPS联测
埋石点的联测是按照以及网布设和联测的。一级GPS网的主要技术要求见表1。

表1 一级GPS网的主要技术要求
一级GPS控制网的布网是按照三边形进行的,并联测3个原有的C级GPS控制网点。通过利用6台以上的双频GPS接收机配合工作,且其测量状态为静态。GPS观测的具体要求见表2。
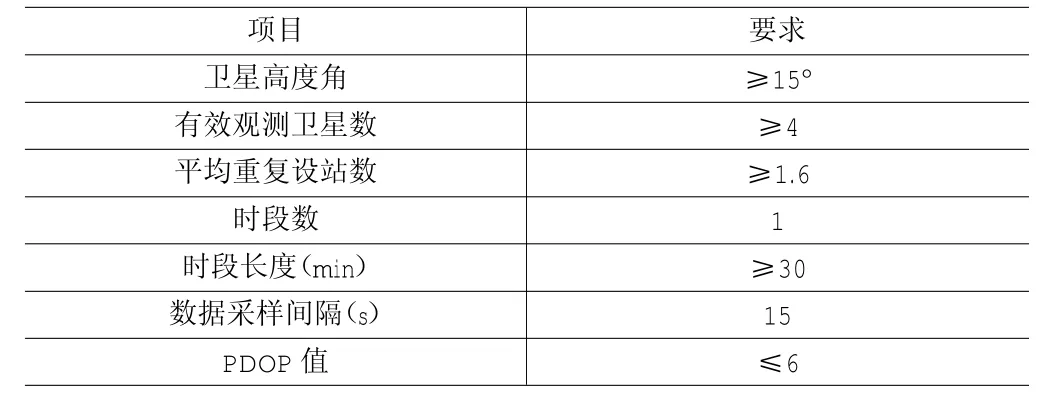
表2 GPS观测的具体要求
3.2.2 GPS数据处理与检核
因受到GPS接收机的限制,会存在一定程度的卫星与接收机之间的时钟误差和卫星轨道误差。同时,卫星信号的传播也会存在电离层、对流层和多路径等环境条件的限制,最终答复降低观测的质量。因此,在基线解算时,需要有针对的取舍观测数据,并在此基础上将不理想的卫星观测信号删除,从而满足具体条件下基线向量解算成果的质量。全部基线通过所设置的各种先验误差限值后,对基线向量进行了复测边相对精度检验和独立闭合环闭合差检验。
3.3 像片控制点测量
3.3.1 像控点布设
①像控点的布设采用全野外布点方案,且每个立体像对内布设四个平高点,如图1。②像控点应选在航向及旁向六片或五片重叠范围内,从而使得像控点尽量满足共用的需求。③像控点到像片边缘之间的距离应不小于1.5cm,对于较为困难的区域,应不小于1.0cm,且距像片上的各种标志间的距离需大于1mm。④像控点的选择位置要在旁向重叠中线附近,且距离方位线的距离应大于5.0m,困难区域要大于4.0m;当旁向重叠过大且无法满足相应的要求时,要注意分别布点。当旁向重叠过小时,会使得相邻航线的点无法实现共用,这时也应分别布点,并将其垂直距离控制在1cm以内,困难地区要小于2cm。
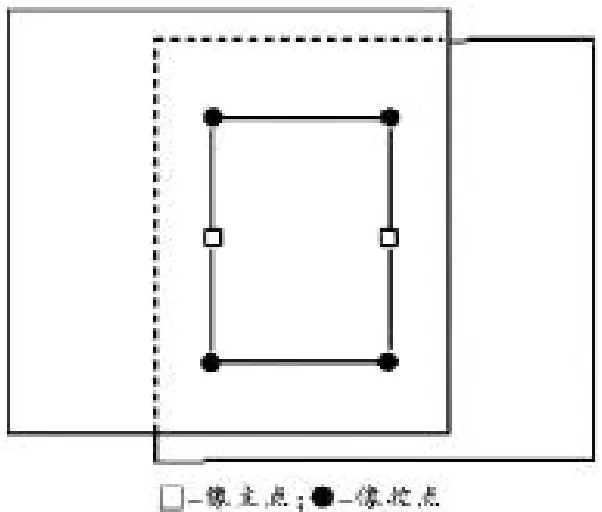
图1
3.3.2 像控点测量
在进行像控点的测量时,通常采用GPS静态测量方式。且测量时间在卫星不少于4颗时要不少于40min。①像片控制点的平面位置中的误差应不大于0.1mm(图1),且高程中的误差要不大于0.2m。②对于像片控制点平面坐标的测量,在一级GPS控制网点的基础上,可采用GPS快速静态测量方式进行测量。其观测时间通常为40~60min。当点位环境较差时,可适当的延长观测时间。③对于像片控制点的高程测量,可选用GPS高程拟合方式。像控点布设了三个网,共施测像控点数目为148个。像控点的技术参数与一级网的参数是相同的,且其解算也等同于一级网。平差有无约束平差和三维约束平差两种,且像控点采用的是三维约束平差。
3.4 GPS辅助空中三角测量
3.4.1 内业加密点选点的相关要求
①加密点通常要选在6个标准点附近,当遇到需要增加连接强度的特殊情况时,可适当的加大连接点的数量。且所选点位构成的图形以大致呈矩形为宜,点位高差间的差距不可过大,同时要注意调绘的面积。②两个立体像对覆盖一幅图时,测图或纠正用的定向点应选在像片距离图廓点或图廓线1cm的范围之内,偏离通过主点且与方位线垂直的直线通常小于1cm。③平地纠正点应避免选在土堤、洼地等无法代表一般地面高程的目标事物上,林区的平地纠正点应尽量选在林间空地的明显处。④沿河道、山谷布设的航线要注意标准点之间的高度差距,从而避免相对定向不定性现象的发生,同时,在地形变化较大的地方,要增选1~2个点。
3.4.2 空中三角测量作业的相关精度要求
相对定向标准点残余上下视差的限制差距应不超过5u,检查点残余上下视差的限制差距应不超过8u,且其匹配点的分布要尽量保持均匀,其点数也不应小于200个,模型连接平面位置较差应不大于0.24m(像方0.03m),高程较差不大于0.28m(像方0.02m)。
绝对定向基本定向点残差、多余控制点不符值和区域网间公共点较差不应超过相应的规定,如表3。

表3 绝对定向限差
4 结语
随着我国科学技术的不断发展,传统的测量技术已无法满足现代社会测量的需求,且其正逐渐被GPS测量技术取代,这使得控制网的布设方式越来越简单灵活。同时,应根据实际的情况选用不同类型的控制网布设方式,并全面考虑接收机类型、数量、时间等事项,从而做好较好的取长补短,促进经济效益的增长。
[1]许仁光,赵振伟,肖木来.航测控制网采用GPS技术的探讨[J].科技经济市场,2011(4):6~7.
[2]许仁光,张春雷,徐丁宁.浅谈GPS在航测控制网中的应用[J].辽宁科技学院学报,2011,13(3):28~30.
[3]袁修孝,高宇,邹小容.GPS辅助空中三角测量在低空航测大比例尺地形测图中的应用[J].武汉大学学报:信息科学版,2012,37(11):1289~ 1293.
P228.4
A
1673-0038(2015)24-0274-02
2015-3-16
王晶(1989-),女,助理实验师,本科,主要从事测量教学工作。
