偏振光导航误差分析
2015-01-10张欢,徐军
张 欢,徐 军
(第二炮兵工程大学 理学院,西安710025)
1 引言
在撒哈拉沙漠中,生活着一种名为沙蚁的小昆虫,研究发现它们能够到距离巢穴很远的地方寻找食物而不致迷路并且能够准确无误返回,这令人不可思议。沙漠气候干燥,地形瞬息万变,另外,沙蚁0.1mg的大脑不具备复杂的记忆与判断能力,它们是如何完成漫长旅途的呢?众多研究都证明原因就在于生物的长期进化,赋予了沙蚁可以利用天空偏振光进行导航的神奇能力[1]。
随着科学技术的飞速发展,人们对于沙蚁的这种导航本领认识更加深入,目前已经弄清楚了它们利用偏振光进行导航的基本原理[2]。
现在已有的导航手段已经比较成熟,如地磁导航、惯性导航、卫星导航等[3],新的技术还不断涌现。卫星导航是现如今最先进的定位、导航手段,然而现代局部冲突环境下,用于定位、导航的卫星成为首要打击的对象,因此单纯依靠卫星进行定位、导航不能适应未来战争的需要,所以新的定位、导航手段是我们需要研究的方向。借鉴沙蚁的这种本领研制导航仪器将为人们导航提供一种新的选择[4]。
历来各种导航手段的精度备受学者们的关注,偏振光导航也是如此,它关系到此导航能否应用于实际,研究偏振光导航的误差的重要性也在于此。本文将着重分析偏振角测量误差对偏振光导航误差的影响。
2 偏振光导航
2.1 偏振光导航的基本原理
众所周知,太阳位置本身就代表着一种方位信息,太阳发出的光经大气散射产生的偏振光也具有方位信息[5],对偏振光信息进行适当处理就可以得到有用方位信息。用于偏振光导航的两个重要量为太阳方位角As和航向角μ,太阳方位角As是太阳子午线与观察点所在经线之间的夹角,航向角μ是观察点的航向趋势与太阳子午线之间的夹角。导航示意图如图1所示。
图1中ψ是观察点的航向趋势与经线(北为正方向)之间的夹角,所以根据示意图中的观察点航向趋势可以得到:


图1 偏振光导航示意图
航向角μ和太阳方位角As的准确度直接影响ψ的精度,太阳方位角是由太阳位置和观察点位置共同确定,只要太阳位置和观察点位置确定,那么太阳方位角的信息也就相对准确。因此偏振光导航的误差主要是航向角μ的误差,下面针对此进行详细阐述。
2.2 偏振角的获取
天空中存在的光为本分偏振光,即自然光与线偏振光的合成[6],采用偏振片测量,设自然光光强为I1,线偏振光光强为I2,线偏振光与偏振片偏振化方向夹角为θ,则此时通过偏振片接收到的光强为

旋转偏振片一周,会出现两个光强极大值点,两个光强极小值点,测量出极大值和极小值,分别为Imaxn和Imin,经分析可得
依式(3)从而得到偏振角θ。

图2 偏振角测量系统
天空中存在的光是部分偏振光,要想测量偏振角,分开自然光与偏振光是关键,偏振片是最好的选择,只通过振动方向与偏振化方向相同的光。滤光片滤除杂散光[7],光电转换装置记录光强值,在步进电机带动下,偏振片跟着转动,如此就可达到测量最大值与最小值的要求[8]。
2.3 航向角的提取
以航向为Y轴、天顶方向为Z轴建立如图导航信息测量坐标系,两个偏振角测量方向为1、2,分别与Z轴夹角为σ、τ,并且都在OYZ平面内;设两个探测方向测得偏振角为θ1、θ2,为计算方便,一般取σ、τ都为45°,μ为太阳子午线与航向之间的夹角,ν为天顶方向与太阳方向之间夹角。则两个方向偏振方向矢量分别为

太阳方 向矢量S=(sinνsinμ,sinνcosμ,cosν)
因为OS垂直于P1和Q2,所以:
联立方程(4)、(5)得:

从而得到航向角μ[9]。

图3 航向角提取示意图
3 偏振光导航误差分析
3.1 误差来源
前面讲到影响偏振光导航精度的主要是航向角μ的误差,航向角的误差与多种因素有关,其中最关键的是大气条件的影响与偏振角测量的误差。现在所建立的偏振光导航模型是建立在理想条件下的,观察点的偏振光存在状态一旦变化,其所代表的太阳方位信息也必将变化[10],还用理想条件的模型去计算就会产生很大误差。现在技术条件还无法对大气条件的影响做出很有效地应对,所以提高偏振光导航精度最有效的途径是提高偏振角测量的精度。
3.2 测量误差对导航精度的影响分析
偏振角测量装置由步进电机带动,步进电机动作一次,步距角为ε度,需要测量的点也许就在两次转动之间的位置,因此不能确定测量的光强最大值与最小值就是实际的值,假设测量最大值时,当前位置与理想位置夹角为ω,则此时测得光强为:

测最小值时,当前位置与理想位置夹角为ρ,则此时测得光强为:

而设定方向测量值理论上没有误差的,应为:

通过计算实际得到:
而理论上:
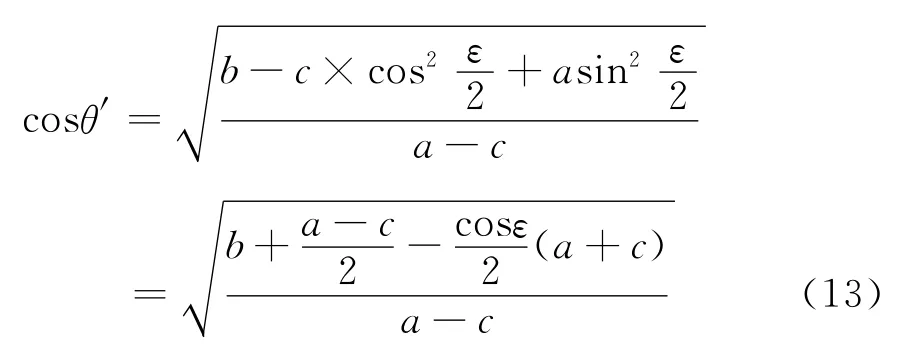
由于ε为小量,则
化简得


图4 cos2θ曲线图
因为cos2θ-cos2θ′是常数,为计算最大误差,选取曲线比较平滑处,得到θ与θ′的偏差最大。
可令θ′=90°,则

现如今精度最高的步进电机,采用驱动器后步距角可达0.009°,a+c与a-c是同一数量级,则得到θ=89.742 1°,θ′-θ=0.257 9°,这个偏差就很可观了,根据前面航向角计算公式得

经化简、约去微小量,最终得到

图5 tanμ曲线图
4 结束语
本文以影响偏振光导航精度的一个重要分量——航向角为研究对象,在利用步进电机测量光强时由于装置本身缺陷导致测量不准确,因此航向角的计算是有误差的。经过推导计算,得到偏振角测量误差会给偏振光导航带来10°左右的影响。作者研究的目的在于进行修正偏振光导航参数,以使偏振光导航在理论上更为精确。当然本文只考虑了众多影响因素中的一个因素,这里只作为研究者参考之用。
[1] 周军,刘莹莹.基于自然偏振光的自主导航新方法研究进展[J].宇航学报,2009,30(2):409-414.
[2] 江云秋,高晓颖,蒋澎龙.基于偏振光的导航技术研究[J].现代防御技术,2011,39(3):67-70.
[3] 晏磊,关桂霞,陈家斌,等.基于天空偏振光分布模式的仿生导航定向机理初探[J].北京大学学报:自然科学版,2009,45(4):616-620.
[4] 范之国,高隽,范登凯,等.利用偏振光、地磁、GPS进行多信息源融合导航方法的研究与实现[J].武汉大学学报:信息科学版,2009,34(11):1324-1327.
[5] 田柳,高隽,范之国,等.基于大气偏振模式分布规律的导航方向角计算方法[J].电子学报,2012,40(1):141-146.
[6] 王光辉,刘晓亮,万峻,等.水下偏振光导航技术[J].舰船科学技术,2011,33(7):79-82.
[7] 赵开春,卢皓,尤政.天空光偏振模式自动探测装置[J].光学精密工程,2013,21(2):239-245.
[8] 崔岩,曹楠楠,褚金奎,等.天空偏振光测量系统设计[J].光学精密工程,2009,17(6):1431-1435.
[9] 王光辉,郭正东,朱海,等.偏振光天文导航定位能力分析[J].光子学报,2012,41(1):11-14.
[10] 关桂霞,晏磊,陈家斌,等.天空偏振光分布的实验研究[J].兵工学报,2011,32(4):459-463.