双卫星导航系统相位平滑伪距在车载定位中的应用
2015-05-06程良涛潘树国汪登辉
程良涛,潘树国,汪登辉,张 浩
(1.东南大学 仪器科学与工程学院,南京 210096;2.东南大学 交通学院,南京 210096)
双卫星导航系统相位平滑伪距在车载定位中的应用
程良涛1,潘树国1,汪登辉2,张 浩1
(1.东南大学 仪器科学与工程学院,南京 210096;2.东南大学 交通学院,南京 210096)
多卫星导航系统组合伪距差分定位可有效提升低成本车载单频设备精度。首先对伪距差分定位原理和数学模型进行阐述和推导,提出了一种适用于单频的窗口化相位平滑伪距定位技术。针对单卫星导航系统在遮挡等环境下观测卫星少,卫星结构不稳定的情况,在统一多系统的时空基准基础上,选取一颗共同参考星,进行伪距差分定位。使用一组实测的多卫星导航系统单频卫星数据进行实验论证,结果表明:车载多卫星导航系统相位平滑伪距平面精度优于0.2 m,高程优于0.7 m,对亚米级北斗系统高精度应用具有实际工程应用意义。
多卫星导航系统组合;伪距差分技术;窗口化;相位平滑
1 引言
北斗卫星导航系统(BeiDou navigation satellites system,BDS)是我国自主研制的全球卫星定位与通信系统,是国家战略性重大空间基础设施[1]。研究BDS在导航、定位和授时等领域的应用已成为国内学者研究的热点。随着BDS的发展和完善,兼容多系统的定位模块越来越受人们青睐。多卫星导航系统定位模式可以有效改善卫星结构,提高定位精度可靠性[2]。采用我国自主建设的BDS,实现精度可靠的导航定位对车辆监测及安全保障等具有重要的意义。
对于车辆实时定位,采用我国的 BDS及美国的全球定位系统(global positioning system,GPS)的载波相位定位方式需顾及模糊度解算,其定位精度较高,但受环境因素及基线长度影响明显。结合卫星伪距的无模糊度和载波相位的高精度特点[3],采用相位平滑伪距方式可以有效的消除卫星钟误差和星历误差,同时将电离层延迟和对流层延迟误差部分消除,可大大提高定位精度以满足车辆车道级导航要求。
本文利用BDS/GPS双系统单频车载导航定位模块,在统一参考星的基础上,对一般伪距差分和载波相位平滑伪距分析比较,通过静态模拟动态,从而获得相位平滑伪距的提高效果。同时,该方法也为大地测量、交通等领域提供良好的借鉴。
2 理论模型
2.1 伪距差分定位原理
在伪距差分定位中,假设观测时刻为t,GNSS伪距和载波观测值的基本非差观测方程[4-6]可表示为
(1)
利用基准值高精度坐标信息,可精确求得卫星t0时刻站星距,则伪距改正数为
(2)
由于改正数的计算和传播会产生时间延迟,为保证定位结果的实时性,需对伪距变化率进行计算,同时,需对伪距变化率进行多历元平滑。
(3)
令时间延迟为t-t0, 则流动站m改正后的伪距观测值为
(4)
在伪距差分中,参考站和流动站在相同时刻观测4颗以上相同卫星即可进行单点定位。根据待测点近似坐标,伪距定位方程线性化得
(5))
式(5)中,δxk、δyk、δzk为所对应的坐标改正值,对于GPS、BDS的组合定位,由于不同系统之间存在时间偏差,因此需要进行时空基准统一。
2.2 统一参考星
BDS和GPS卫星系统的时间和坐标系统均不同,在多系统联合导航定位中,对坐标框架和时间系统进行转换统一是十分必要的[6]。
GPS时(GPS time,GPST)开始于1980-01-06 T 00∶00∶00,此时开始,GPST与协调世界时(coordinated universal time,UTC)的偏差为秒的整数倍,北斗时(BeiDou navigation satellite system time,BDT)由于闰秒的影响,使得BDT与GPST相差14 s的整数倍,因此GPST与BDT的转化关系可表示为:
GPST=BDT+14s
(6)
目前,BDS采用的中国国家大地坐标系(Chinageodeticcoordinatesystem2000,CGCS2000)与世界大地坐标系(worldgeodeticcoordinatesystem1984,WGS84)之间没有明确的转换公式,可认为两者之间的坐标系参数相差很小,对于低于厘米级的导航精度可不做考虑。
BDS/GPS系统的时间和坐标统一后,可利用高度角最大的原则选取共同的参考星,实现双系统真正融合。其伪距观测方程可表示为
(7)
式(7)中,Δdtr表示卫星系统与参考卫星系统之间的接收机钟差。同一系统,系数为0,不同系统,系数则为1。
2.3 BDS/GPS组合相位平滑伪距
采用载波观测值平滑伪距,可较大程度提升伪距精度。对相邻两历元ti,ti-1的相位观测量求差,可消除整周模糊度的影响[8-9],即为
(8)
同时,对相邻两个历元ti,ti-1之间的伪距观测值求差,可得
(9)
将式(8)带入式(9)可得相位平滑伪距的公式为
(10)

(11)
根据载波相位平滑伪距的原理,就是以小尺度的相位观测值平滑大尺度的码伪距观测值,以达到提高精度的作用。对于单频全球卫星导航系统(globalnavigationsatellitesystem,GNSS)车载定位设备,由于无法根本消除Hatch滤波中电离层延迟对定位结果的影响,随着平滑时间的递推,电离层延迟造成的伪距偏差增大。在实际使用中,可根据经验模型估计的累计电离层延迟变化量,确定一个平滑窗口的大小[7],采用窗口式递推算法实现载波相位平滑伪距,以减少单频设备中电离层延迟对平滑后伪距偏差的影响。
通过全球卫星导航系统国际服务协会(internationalGNSSservice,IGS)跟踪站大量数据验证,累计电离层延迟变化量在0.2m左右,由此确定分段平滑窗口的大小,可有效控制单频相位平滑伪距的离散性。
3 算例分析
3.1 测试方案
本论文采用BDS/GPS单频双系统车载定位模块,通过该板卡获取原始RINEX观测数据,静态模拟动态,进行事后数据验证分析,通过测试分析相位平滑伪距定位效果。论文采用两种方法进行比较测试:
(1)伪距差分定位:利用原始观测数据,不进行载波平滑伪距,验证伪距差分定位结果,比较GPS及BDS伪距差分质量。
(2)相位平滑伪距差分:利用单频载波平滑伪距,验证单频设备伪距差分定位效果。
需要指出的是,本次测试基线长度为6.7 km,观测环境较好,实际车载效果会随环境变化而略有不同。车载模块卫星数情况如下:
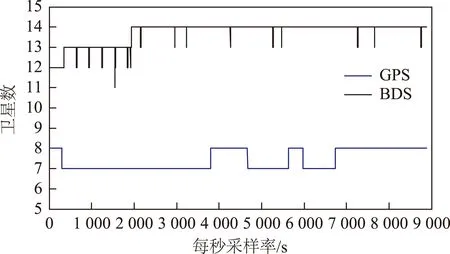
图1 GPS及BDS卫星数
图1中可以看出,随着我国北斗卫星区域组网完成,实测数据中北斗卫星数普遍在12颗卫星以上,对解算效果有较大提升。
3.2 数据分析
1)伪距差分定位
对单频车载定位模块进行伪距差分定位,分析GPS和BDS各星座伪距差分定位效果:
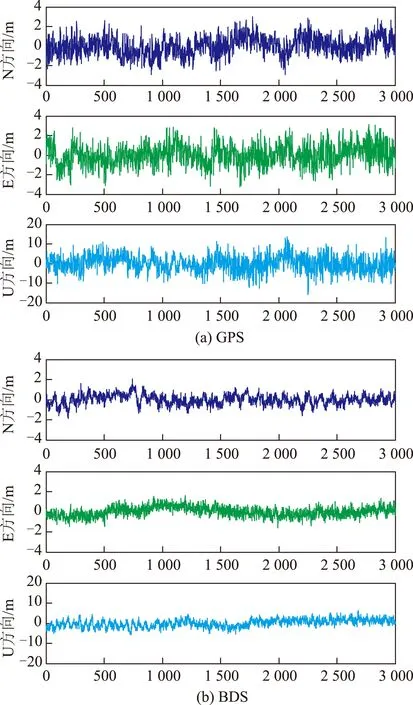
图2 GPS、BDS伪距差分定位精度
对图2结果统计中误差,结果如表1所示。
从表1中可以看出,BDS系统伪距差分定位精度明显高于GPS伪距差分精度,一方面是GPS卫星数远小于BDS卫星数,另一方面由于车载设备本身BDS系统伪距质量较高。
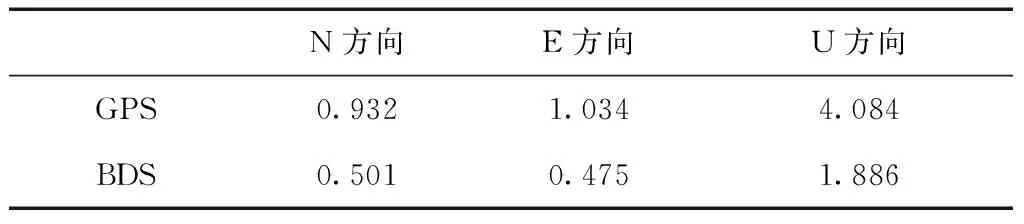
表1 各系统伪距差分定位中误差/m
(2)相位平滑伪距差分定位
采用相位平滑伪距定位技术,以增强定位效果,在解算过程中,设置相位平滑伪距的窗口大小为1 000个历元(观测时间为16.7 min),比较测试:(a)多星座融合相位平滑伪距结果;(b)多星座未进行相位平滑伪距结果,比较情况如图3所示。
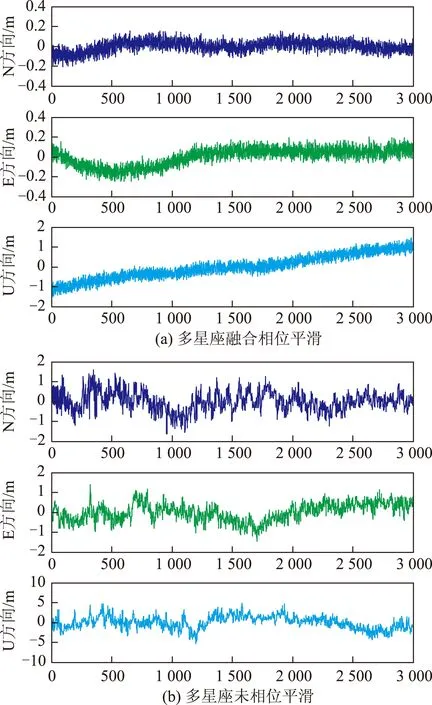
图3 多系统融合伪距平滑差分定位效果
图3中,可以明显看出平滑伪距后定位精度,相比较未进行相位平滑结果有较大的提升(提升约一个数量级)。对于U方向误差单向递增,是因为载波相位和伪距受电离层延迟方向相反,且该段时刻,电离层变化剧烈,无法消除历元电离层延迟的影响。
由于GPS及BDS伪距精度存在差异,这里对GPS和BDS根据其伪距精度进行一定的权值设置,对图3结果统计中误差,结果如表2所示。
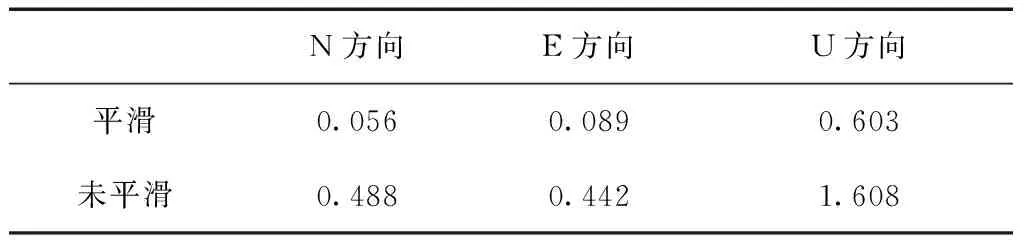
表2 伪距平滑差分定位中误差/m
比较表1及表2可以明显看出:多星座平滑伪距差分定位后定位精度平面精度优于0.2 m,高程优于0.7 m,满足亚米级车载定位需求。
4 结束语
本文采用BDS/GPS双系统单频定位模块,在统一参考星的基础上,对其观测量进行伪距差分和相位平滑伪距。将各项误差包含在伪距改正值中,车载模块利用接收的改正数据进行伪距改正,再进行单点定位。通过分析比较可知,采用相位平滑伪距技术较大提升车载导航精度,可实现亚米级定位。若对伪距进一步定权及抗差处理,可得到更高的定位效果。该方法在车载导航应用中具有很大的前景,可满足车载导航定位的实时性和精度要求。
[1] 杨元喜.北斗卫星导航系统的进展,贡献与挑战[J].测绘学报,2010,39(1):1-6.
[2] 高成发,胡伍生.卫星导航定位原理与应用[M].北京:人民交通出版社,2011:102.
[3] 喻国荣,王庆,彭慧.多参考站网络的虚拟观测值生成算法[J].东南大学学报:自然科版.2007.37(6):1113-1116.
[4] 邓建,王庆,潘树国.基于多参考站的分米级GPS伪距差分定位方法[J].东南大学学报:自然科学版.2010.40(2):316-319.
[5] 汪登辉.多星座GNSS模糊度解算及非差区域增强信息生成算法研究[D].南京:东南大学交通学院,2014.
[6] 高星伟,过静珺,程鹏飞,等.基于时空系统统一的北斗与GPS融合定位[J].测绘学报,2012,41(5):743-748.
[7] 彭秀英,郭际明,薛树强.GPS单频伪距相位平滑及其单点定位的精度分析[J].测绘科学,2011,36(5):39-41.
[8] HATCH R.The Synergism of GPS Code and Carrier Measurements[C]//Proceedings of the 3rd International Geodetic Symposium on Satellite Doppler Positioning.Las Cruces,NM:New Mexico State University,1982:1213-1231.
[9] MCGRAW G.How can Dual Frequency Code and Carrier Measurements be optimally Combined to Enhance Position Solution Accuracy[J].Inside GNSS,2006,1(5):17-19.
[10]FOTOPOULOS G,CANNON M E.An Overview of Multi-reference Station Methods for cm-level Positioning[J].GPS Solutions,2001,4(3):1-10.
[11]GAO Yang,LI Zuo-fa.Ionosphere Effect and Modelling for Regional Area Differential GPS Network[C]//Proceedings of the 11th International Technical Meeting of the Satellite Division of The Institute of Navigation(ION GPS-98).Nashville,TN:the Institute of Navigation,1998:91-97.
Application of Phase Smoothed Pseudo-range Position Based on Double-system in the Vehicle
CHENG Liang-tao1,PAN Shu-guo1,WANG Deng-hui2,ZHANG Hao1
(1.Southeast University Communication College,Nanjing 210096,China;2.Southeast University Instrument Science and Engineering College,Nanjing 2100966,China)
The pseudo-range differential position of multi-system integration is able to improve the accuracy of low-cost single-frequency apparatus carried on car effectively.In this paper,the theory and mathematical model of BDS/GPS pseudo-range differential position are introduced at first,and carrier phase smoothed pseudo-orange of single frequency,which uses a window mode,is proposed then.In case of less observable satellites or unstable satellite structure,this paper also discusses the conversion of time and coordinates between BDS and GPS,which use a common reference satellite to get a pseudo-range differential position.Through a series of observed data from BDS/GPS single-frequency chip carried on car,the results shows the improvement of algorithm and positioning precision of single-frequency dual constellation RTD equipment,plane accuracy better than 2.0 m,elevation than 0.7 m,which has practical engineering significance to the application of sub-meter precision with BDS.
multi-system integration;pseudo-range differential;window mode;carrier phase smoothed
2014-06-25
国家科技支撑计划(2012BAJ23B01)。
程良涛(1989),男,江西上饶人,硕士生,主要研究方向是卫星导航定位理论与应用。
P228
A
2095-4999(2015)-01-0092-04