移动平台三维花卉植物触摸反馈可视化模拟
2015-01-06李雪雯彭月橙淮永建
李雪雯,彭月橙,淮永建
(北京林业大学信息学院,北京100083)
移动平台三维花卉植物触摸反馈可视化模拟
李雪雯,彭月橙,淮永建
(北京林业大学信息学院,北京100083)
移动平台上高交互感的三维花卉植物可视化已成为植物研究、园艺设计等领域的重要需求,但现有植物运动形变方法还不能根据触摸力度对整株花卉植物或单一叶片的受力进行不同的形变过程模拟。为此,提出一种改进的三维花卉植物触摸反馈可视化模拟方法。根据植物整株交互需求或单一叶片受力情况,研究不同方式的触摸反馈模拟方法。在模拟触摸反馈时,整株受力应用动力学原理,抽象为杆件模型并计算形变结果。单一叶片受力时,根据触摸屏获取数据,并结合叶脉骨架旋转模型算法,模拟不同力度触摸造成的叶片形变,过程中无需手动输入参数。仿真结果表明,该方法应用于移动平台后,帧速率稳定,具有较高的真实感。
移动平台;三维花卉;触摸反馈;交互设计;杆件模型;旋转模型
1 概述
随着花卉在内的虚拟植物形态、生长和功能结构模拟等研究的迅速发展,越来越多的研究者在对花卉研究时选择了三维虚拟花卉植物。目前各类软硬件性能逐步提高、移动设备快速普及以及交互方式推陈出新,使简单的三维展示不能完全满足研究与相关应用的需求。能够在移动平台上模拟花卉植物受力并发生反馈成为三维花卉植物可视化研究中要考虑的问题。
目前植物受到外力的运动模拟研究主要是树木在风场中的运动[1]或是对单一叶片进行形变模拟。根据植物整株受力或单一叶片触碰后受力进行不同的运动反馈模拟还需要深入研究。
在整株受力的运动模拟中,主要分为基于过程和基于物理的模拟方法[2],这2种方法各有其优势,但基于过程的方法需要大量实验数据从而总结归纳出适宜的公式,没有通用性;基于物理的方法运算量庞大,对于处理能力相对较弱的移动终端并不适合[3]。在单一叶片受力形变模拟中,当前典型的方法包括基于物理模型、基于骨架或基于曲线曲面等。其中,文献[4-5]中使用了双层弹簧模型,根据叶子的力学结构模拟了叶子萎蔫及老化的变形;文献[7-8]提出并使用了由叶脉骨架控制变形的方法。这些变形方法都存在计算量过大[9]或需要手动输入参数,不能根据受力大小自动进行不同程度的形变[10]等问题。为此,提出一种移动平台三维花卉植物触摸反馈可视化模拟方法。
2 三维花卉植物模型
根据应用领域不同的需求,虚拟植物技术通常是从时间或空间上以静态虚拟和动态虚拟的方式在计算机上实现对植物形态、生长和功能结构进行可视化仿真。因此,虚拟植物模型可相应地分为静态虚拟模型和动态虚拟模型两大类。又根据功能差异可以进一步将这2种模型分别分为3类[10]。不同的模型种类都有不同的模型构建方法。本文系统着重讨论三维花卉植物可视化模拟,因此,首先选择基于真实感构建静态组合型虚拟模型。
提示与反馈机制是交互设计中非常重要的环节。在传统的应用设计中,通常只重视提示和警告的设计,告诉用户接下来应该如何操作,或者在操作错误后,显示错误原因。这种交互方式并不够自然和友善,需要培养和训练,用户才能熟练使用。目前的反馈设计更应通过合适的反馈以及和程序之间的交互让用户时刻知道现在发生了什么。所以,在花卉相关领域的应用设计中,也要重视交互设计,花卉也同样需要能够发出适当的反馈。
3 整株运动
为了具有更好的用户体验,针对花卉植物被选中并拖拽以及触摸植物叶片时,应该有不同的反馈机制与反馈效果。在对整株花卉植物进行选中和拖拽的过程中,整株花卉植物应以合理、真实的方式进行运动,反馈用户的选中和拖拽操作。
3.1 杆件模型及其受力分析
在整株花卉植物受力分析时,将花卉看作是一种连杆结构在受力环境下的弯曲表现。根据这一特点,本文使用文献[11]中类似的方法对花卉模型进行了受力分析,将花卉抽象为杆件模型,如图1(a)所示。

图1 杆件模型及其坐标系
对花卉进行拖拽过程中,花卉的形变主要来源于空气的阻力,这种力作用类似于风力作用。于是本文利用模拟风吹动花卉的方式,模拟被拖拽的效果。模型中花卉的分枝抽象为杆件,花卉的杆件间距较短,因此可以假设力作用于每段杆件的末端控制点。根据该假设,花茎的弯曲通过每个控制点的旋转实现。依据杆件模型建立的坐标系如图1(b)所示,根据杆件模型的初始端a为原点建立世界坐标系xyz,将世界坐标系中的力向量投影到各段杆件的局部坐标系中,其中,杆件作为局部坐标系的x轴,z轴垂直于x轴方向向量和力的方向向量交叉方向,运用右手螺旋法则确定y轴方向。根据材料力学,平行于杆件的力不会对杆件造成弯曲(即x轴),杆件的旋转总是围绕各杆件局部坐标系的y轴和z轴进行。
力作用下杆件的旋转角度θ由y轴和z轴所受力F、杆件长度L、材料强度的杨氏模量E和杆件的轴惯性力矩I决定,M表示杆件受到的力矩。

若杆件横截面为圆形,半径为r则:
为从根本上解决抗旱和排涝问题,德州市以“灌排结合、河渠相连、水量互济”为目标,编制了《德州水网建设规划》。在年度项目实施上,每年根据水网规划和各县(市、区)上报的治理项目,按照先急后缓的原则,优先安排群众要求迫切、对引排水起关键作用、工程效益显著的河道工程。对不是水网规划内的河道由县乡分级负责治理。同时加强组织领导,德州市及各县(市、区)都成立了以政府分管领导为组长,水利、农业部门及各乡镇负责人为成员的河道治理指挥部,每年签订责任状,实现了治理一条、竣工一条、见效一条、销号一条。

由式(1)~式(3)可推导出杆件旋转角度θ的大小。

对于同一种花卉而言,杨氏模量E、杆件的长度L和圆周率π均为常数。因此,花茎的旋转角度θ只受到花茎横截面半径r和的影响,在园艺设计等应用中,又可把同一品种的花卉植株的大小假设为基本相同,即r相同,则旋转角度θ可通过计算得出,并与力F呈正比。
3.2 骨骼绑定和关键帧效果
为了模拟杆件的运动效果,本文使用了骨骼模型绑定和层次骨骼运动方法。将由花卉枝节抽象而成的杆件设置为一段段骨骼,通过骨骼间的串联,形成一多层次骨骼系统,骨骼模型和绣球花模型绑定骨骼实例如图2所示。

图2 骨骼模型
对已经建立好的骨骼模型运用Spline反向动力学解算器的基本原理,对骨骼系统进行反向动力学计算。当力作用于每一段骨骼时,该段骨骼的运动会传递给系统中的下一段骨骼,形成了有秩序光滑的多层次骨骼连动效果。
4 局部形变
当以单株花卉植物为对象,观察其形态结构特点时,同样需要触摸反馈模拟。触碰花卉植物某一叶片时,相应叶片根据受力大小不同,发生不同程度的运动与形变,以反馈用户的触碰。
4.1 受力叶片的判断
花卉植物局部受力反馈,首先要判断受力的叶片。在三维空间确定触摸屏触摸对象,通常选用的方法是将触摸点的二维坐标通过矩阵变换还原成原始视椎体上的三维坐标,再和模型进行碰撞检测[13],以确定触摸对象。
考虑到碰撞检测是在CPU上完成,但移动终端处理能力相对有限,又因为部分花卉的叶片数量很大,坐标转换的方法不适用于复杂场景,所以本文采用光线跟踪方法,判断受力叶片,并作出相应的运动反馈。
4.2 叶片形变仿真方法
在对叶片进行受力分析时,首先要对叶片建立叶脉骨架,根据模型选取叶片主脉和结点,二级叶脉从主脉结点自动分生[13]具体算法如图3所示。
二级叶脉片段1与主叶脉夹角为α,片段2与片段1延长线成β角,后续片段以与片段2相同的方式延伸。

图3 叶片主脉和二级叶脉
叶脉骨架被离散成一系列由结点连接的叶脉片段,利用叶脉片段绕轴旋转不同角度模拟叶脉弯曲效果,图4描述了一条简化的主脉从T1时刻到T4时刻的形变过程。

图4 叶脉骨架旋转模型
(1)在T1时刻,叶脉上有4个结点Pi,均位于xoy平面,此时刻为静止状态,并受到外力作用,开始发生形变。
(2)从T1时刻开始,结点P1(x1,y1)绕轴V2旋转,至T2时刻,片段P2P1与初始状态夹角为θ1。其中向量V2(a,b)为旋转轴,在xoy平面内且经过结点P2(x2,y2),与片段P2P1夹角为γ。满足:

(3)从T2时刻开始,结点P2绕轴V3旋转,结点P1跟随父结点P2绕V3旋转。至T3时刻,片段P3P2与初始状态夹角为θ2,片段P2P1与初始状态夹角为θ′1。其中:

(4)从T3时刻开始,结点P3绕轴V4旋转,结点P2,P1跟随父结点P3绕V4旋转。至T4时刻,片段P4P3与初始状态夹角为θ3,片段P3P2与初始状态夹角为θ′2,片段P2P1与初始状态夹角为θ″1。其中:根据上述规律可得出:结点Pi(1≤i≤n-1)在Tn时刻与初始状态夹角为:

其中,θk表示第k个结点在Tk+1时刻与初始状态的夹角。
由式(9)可计算得出叶脉骨架上任意结点在Tn时刻与初始状态的夹角。为了便于计算,本文设定:


其中,θ根据触摸屏幕判断的受力大小决定,在下一节中具体描述;dk为第k个结点与叶柄点的距离;D为叶脉上结点与叶柄点的最大距离。
点在三维空间绕轴旋转,用四元数计算。在右手坐标系中,以坐标原点o为旋转中心,Vi+1(α,β,γ)(α2+β2+γ2=1)为旋转轴,结点Pi旋转θ后,新坐标P′i(t′;x′,y′,z′)满足:
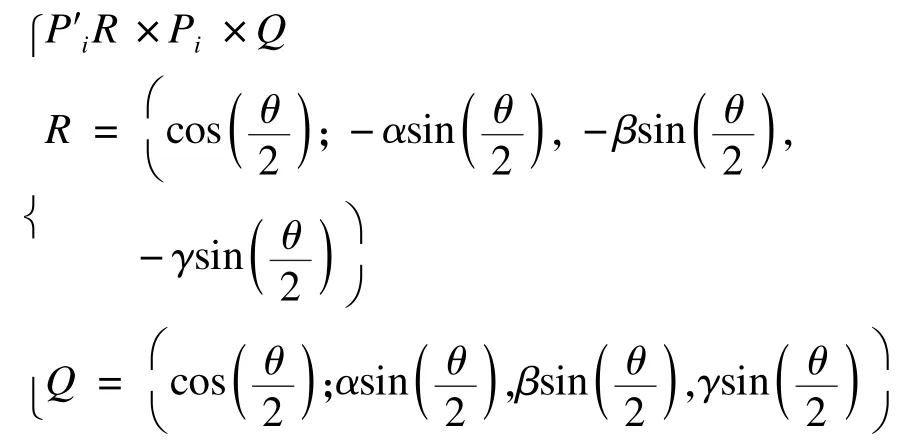
其中,P′i,Pi,R,Q为四元数;Pi(0;x,y,z)为点Pi扩展得到的四元数,计算得出的P′i′(t′;x′,y′,z′)中的虚部,即P′i(x′,y′,z′)为坐标。
4.3 受力大小及形变程度的确定
典型的叶脉骨骼旋转模型需要手动输入一个旋转角度,或者根据实验经验,拟定一个固定的旋转角度。本文将叶脉骨骼旋转模型和移动端交互方式相结合,根据触摸时触摸点移动速率判断叶片受力大小。
在一次触摸中,通过起始点和结束点的坐标可以计算出连续触摸的位移s;若这次触摸时长为t,忽略其他影响因素,认为速率v=s/t(像素/帧)。当速率越快,即触摸位移长且时间短时,则给叶片一个相对较大的力。并根据v的大小,建立线性关系得到式(4)中的θ=kv(0≤θ≤π/2,k为常数),实现在移动平台上通过触摸屏,确定受力大小从而计算得出叶脉骨骼旋转角度,即叶片形变程度。
5 实现效果
通过上述方法在移动终端上,实现了整体拖拽或单一叶片受力不同效果的、较高真实感的运动形变反馈,模拟了花卉的被动运动,有效提高了用户交互感受。并且避免了计算量过大或需要手动输入参数控制形变程度的情况。
5.1 形变效果
图5、图6分别为以绣球花为例,整株花卉植物被拖拽时的弹性运动效果和停止拖拽后弯曲角度衰减效果。

图5 花卉模型被拖拽后的运动效果

图6 花卉模型停止拖拽后的运动效果
图7 为以马蹄莲为例,单一叶片受力形变效果。与叶片真实弯曲情况类似。

图7 单一叶片受力形变效果
5.2 实际应用效果与速度
实验设备为:GoogleNexus 7。配置为: NvidiaTegra 3,1.3 GHz,1GB。通过stats.js测试页面帧速率。fps变化区间在(0~27),大部分时间稳定在16 fps。图8为应用本文触摸反馈形变模拟的方法,在移动平台实现的用于花卉展示和简单园艺设计的系统截图,包括整株花卉植物移动过程中的形变和触摸单一叶片时叶片旋转形变效果。
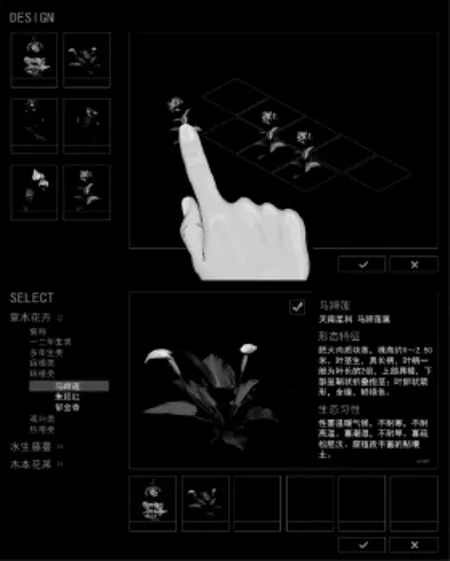
图8 移动平台应用本文方法后的实现效果截图
6 结束语
本文方法实现了移动平台的三维花卉植物触摸反馈模拟。在整株运动时,利用杆件受力分析和骨骼绑定的方法,快速计算渲染花卉的形变和运动效果;在单一叶片受力时,可以根据触摸情况,叶片发生不同程度的旋转形变,提升了系统的交互体验。
目前本文方法实现效果在仿真效果和受力细节上还有需要改进的地方:(1)在花卉整体运动的形变分析中,暂时将各种花卉的材料强度视为相同。今后还需要根据不同种类的花卉进行细致的统计与有依据的区分。(2)在叶片受力分析中,没有考虑触摸力的方向,仅通过触摸屏反馈数据计算出触摸点移动的速率进而给叶片施加不同大小、相同方向的力。在后续的工作中,应根据触摸方向的不同,考虑力的不同方向。
[1] 王春华,杨克俭.基于L-系统和Perlin噪声函数的风吹树动模拟[J].计算机工程,2009,35(12):192-193,197.
[2] Akagi Y,Kitajima K.Computer Animation of Swaying Trees Based on Physical Simulation[J].Computers and Graphics,2006,30(4):529-539.
[3] Zhang Long,Song Chengfang,Tan Qifeng,et al.Quasiphysical SimulationofLarge-scaleDynamicForest Scenes[C]//ProceedingsofInternationalComputer Graphics Conference.[S.1.]:IEEE Press,2006:735-742.
[4] 迟小羽,盛 斌,陈彦云,等.基于物理的植物叶子形态变化过程仿真造型[J].计算机学报,2009,32(2): 221-230.
[5] Lu Shenglian,Zhao Chunjiang,Guo Xinyu,et al.Bi-layered Mass-spring Model for Leaf Motions[J].Journal of System Simulation,2009,21(14):4383-4388.
[6] Sung Minhong,Simpson R B,Baranoski G V G. Interactive Venation Based Leaf Shape Modeling[J]. ComputerAnimationandVirtualWorlds,2005, 16(3/4):415-427.
[7] Lu Shenglian,Zhao Chunjiang,Guo Xinyu.Venation Skeleton-based ModelingPlantLeafWilting[J]. International Journal of Computer Games Technology, 2009,(2009):1-8.
[8] 伍艳莲,汤 亮,曹卫星,等.骨架驱动的作物叶片变形模拟[J].计算机工程与应用,2011,47(3):11-14.
[9] 唐卫东,李金忠,刘昌鑫,等.虚拟植物模型及其构建方法研究综述[J].计算机应用研究,2012,29(9): 3206-3211.
[10] 王春华,韩 栋,张洪飞.一种风吹树动模拟的新方法[J].计算机应用研究,2009,26(7):2757-2758, 2764.
[11] 淮永建,李 凡.虚拟花卉植物在可变风场中的运动行为仿真[J].农业工程学报,2012,28(19):130-135.
[12] 徐宏明,何东健.基于旋转模型的植物叶子卷曲变形模拟[J].计算机工程与设计,2012,33(11):4309-4313.
[13] 胡祥潇.一种三维碰撞检测并行算法的设计与实现[D].武汉:华中科技大学,2011.
编辑 索书志
Visual Simulation of 3D Flower Plants Touch Feedback on Mobile Platform
Highly interactive visualization of 3D flower plants on mobile platform has become an important requirements of plant researchers,garden designers etc.However,simulations of specific deformation process of the whole plant or single blade under different touching intensity are not available via existing methods.Therefore,this paper proposes a visual simulation method of 3D flower plants touch feedback on mobile platform,presents analysis of the interaction requirements of whole plant or force conditions of single blade,and studies several methods for touch feedback simulation.In the simulation,the method is divided into two parts.The deformation of the whole plant is simulated according to dynamics theory,the deformation of single blade is calculated according to data from touch screen and rotation model of vein skeletons.Deformation processes under different touching intensity are simulated without inputting parameters manually.Simulation results show that this method can be applied on mobile platform,satisfactory realism and frame rates are obtained.
mobile platform;3D flower;touch feedback;interaction design;rod model;rotation model
李雪雯,彭月橙,淮永建.移动平台三维花卉植物触摸反馈可视化模拟[J].计算机工程,2015, 41(2):253-257.
英文引用格式:Li Xuewen,Peng Yuecheng,Huai Yongjian.Visual Simulation of 3D Flower Plants Touch Feedback on Mobile Platform[J].Computer Engineering,2015,41(2):253-257.
1000-3428(2015)02-0253-05
:A
:TP391
10.3969/j.issn.1000-3428.2015.02.048
中央高校基本科研业务费专项基金资助项目"新媒体技术在非物质文化遗产保护中的应用研究"(RW2011-29)。
李雪雯(1988-),女,硕士,主研方向:Web 3D技术,虚拟植物;彭月橙,副教授、博士;淮永建(通讯作者),教授、博士生导师。
2014-02-26
:2014-03-25E-mail:huaiyj@163.com
