VANET中利用空闲TDMA时隙协助发送数据的方法
2015-01-06陈振韩江洪杨勇刘征宇陆阳
陈振,韩江洪,杨勇,刘征宇,陆阳
(1. 合肥工业大学 计算机与信息学院,安徽 合肥 230009;2. 安徽大学 计算机教学部,安徽 合肥 230601)
1 引言
随着嵌入式技术和无线通信技术的发展,车辆装有不同的传感器收集相关状态信息,并通过车载通信模块与其他车辆交换信息,从而产生了移动自组网(MANET, mobile ad hoc network)的一种新应用形态——车载自组网(VANET, vehicular ad hoc networks)[1]。VANET在行驶安全、交通优化和车载娱乐等方面有着重要的作用,它是智能交通不可或缺的部分,吸引了越来越多的研究机构和汽车厂商的注意[1~4]。
网络拓扑的快速变化、无线传输的不可靠性、车辆间实时安全信息严格的时延限制和高可靠性要求是 VANET走向实际应用所面临的诸多挑战[1]。VANET的MAC层标准IEEE 802.11p以竞争的方式访问无线信道,不能保证车辆及时可靠地访问信道,从而不能保证车辆间实时安全信息及时可靠地传输[5,6]。此外,IEEE 802.11p不能对广播信息进行确认,还会产生“信息碰撞”等问题[7]。为了避免VANET节点访问信道的不确定性,文献[8~11]基于TDMA(time division multiple access)方法提出了分布式 TDMA方法。在该方法中,信道以帧(frame)为单位在时间上进行分割,每一帧再分割成若干时隙(slot),每个节点对应一个时隙,且只在自身对应时隙内发送数据,使节点以确定的方式访问信道,消去了隐藏节点的影响[8~11]。
然而,无线信号衰减、车辆高速移动和车辆本身对无线信号的阻挡使VANET中的无线传输并不可靠[12]。在上述分布式 TDMA方法中,如果节点在当前对应时隙内发送数据失败,即使当前帧还存在一定数量的空闲时隙,节点也必须等待下一帧的对应时隙才能重发数据。显然,该方法没有充分利用无线信道资源,且不能避免由于信道条件差所导致的分组丢失和网络吞吐量下降问题。此外,由于间隔时间短,在下一帧的对应时隙内无线信道特性和条件几乎保持不变,即使节点在该时隙内重发数据,目标节点也几乎无法接收到数据,反而浪费了发送其他数据的机会。这种情况下,如果通过其他信道(如附近其他节点到目标节点的信道)来重发数据则会提高数据发送成功概率。虽然多样性和信道编码技术能够修复信道并提高无线传输的可靠性和网络吞吐量,但会带来额外的设备和开销[13]。为此,本文提出协同的TDMA方法(CoTDMA, cooperative TDMA),通过利用节点的空闲TDMA时隙协助重发传输失败的数据,以提高数据发送成功概率和网络吞吐量。主要思想为:节点在其对应时隙内发送数据,由于无线传输的广播特性,附近节点也接收到数据,如果数据发送失败,则附近节点利用自身对应的空闲时隙协助重发数据。
2 CoTDMA
2.1 信道获取
文献[8]针对VANET应用场合提出了Ad Hoc MAC方法,该方法是一种分布式TDMA方法,基于单信道,有效地支持点到点和广播通信方式。在Ad Hoc MAC中,信道以帧为单位在时间上进行分割,每一帧再分割成若干时隙。节点监听信道,当监听一次数据传输后,在分组头的帧信息(FI, frame information)域中标注相关标志信息,这些标志信息反映了相邻节点的时隙占用情况。各个节点通过交换分组头的FI域,判断出两跳范围内节点时隙占用情况,并选择一空闲时隙作为自身对应的时隙。节点基于两跳范围内的时隙占用信息选择时隙,且只在自身对应时隙内发送数据,避免了信息碰撞和隐藏节点的影响。该方法要求网络实现精确的时间同步,以便节点能够准确判断帧和帧中每一时隙的起始时间。随着导航系统的普及,车辆可通过导航系统中的GPS系统获知自身的位置信息,并利用GPS脉冲信号实现时间同步。如果 GPS信号丢失,仍可利用GPS接收器中的振荡器实现较长时间的同步[11]。文献[9]结合了节点位置信息确定时隙。在文献[9]中,相邻节点对应了帧中相邻时隙,放宽了对时间精确同步的要求。
此外,由于节点的相对移动,原来不在两跳范围内的节点彼此接近,会造成多节点访问同一时隙问题,这种情况下,时隙访问冲突节点必须再请求时隙[10,11]。文献[10,11]基于 Ad Hoc MAC 提出了VeMAC方法,该方法把时隙分为3个不同的子集,分别对应了公路不同方向车辆和公路旁固定通信设备,减少了由于节点相对移动导致的时隙再请求次数。在单个信道上,与Ad Hoc MAC相比,VeMAC缩短了节点获得时隙的时间[10],提高了网络吞吐量[11]。
需要指出的是,VeMAC是基于多信道的MAC层方法。该方法以分布式方式访问控制信道,并基于控制信道以中心管理方式分配其他信道[10],所以如何有效地访问控制信道便成为VeMAC的关键问题。VeMAC基于改进的Ad Hoc MAC访问控制信道[10,11]。本文用 VeMAC标识文献[10,11]中改进的Ad Hoc MAC方法,不考虑多信道访问部分。
在Ad Hoc MAC及其相关改进方法中,节点发送数据失败时,必须等待下一帧的对应时隙才能重发数据,即使当前帧还存在一定数量的空闲时隙,本文将利用这些空闲时隙来协助发送传输失败的数据。由于成本因素,特别在VANET走向实际应用的早期阶段,大多车载通信设备都基于单个通信接口,这种情况下,采用多信道方式会增加系统的复杂性和实现难度,此外,有效的多信道访问需要建立在有效的单信道访问基础上,所以现有的VANET研究大都基于单信道。本文基于单信道进行研究,并基于单位圆盘模型(unit disk model)来表示信道[14,15]。假设车辆都具有相同的无线一跳传输距离R。当车辆之间距离大于R时,车辆不能直接通信,当车辆之间距离小于或等于R时,在不考虑信息碰撞的情况下,设车辆能够成功发送数据的概率为p。p越大,信道质量越好。在下面研究中,信道以帧为单位进行分割,每一帧再分割成若干时隙,且假设节点都通过VeMAC请求获得时隙(不考虑节点请求时隙及相关问题,主要关注在已获得时隙的节点间协作重发数据的方法)。通常帧的时间长度短(小于0.1 s),同一帧内各节点发送数据时,可以认为车辆是静止的[16]。
2.2 协助发送数据
为了建立相关分析模型和对网络性能进行比较,在节点获得时隙后,主要考虑点到点的通信方式。
图1为CoTDMA数据分组在MAC层结构,其中,PHY Header、MAC Header、Frame Information、Payload Data和CRC域与Ad Hoc MAC和VeMAC相同,域中的相关ID号(占2 byte)为节点标识。每个节点随机产生自身的ID号,如果发现自身的ID号与其他节点的ID号相同,则更改自身的ID号。ID号比MAC地址短,在分组头中采用ID号来标识节点有效地减小了数据分组大小[11]。为实现其他节点协助发送传输失败的数据功能,在分组头中增加COOP Header域,其中,Position为节点当前位置(采用经度和纬度表示,各占4 byte),Source ID为待发送数据(Payload Data)的最初源节点ID号,ID-1、ID-2、…、ID-n为节点在上一帧中已成功接收数据的Source ID,n决定于节点在上一帧中已成功接收数据的时隙数(节点的上一帧为节点上一对应时隙到节点当前对应时隙间的所有时隙,不包括当前对应时隙。节点的当前帧为节点当前对应时隙到节点下一对应时隙间的所有时隙。它们都含有帧中固定的时隙数,不影响问题的分析和处理)。如果待发送数据的Source ID与当前节点的ID号相同,则表明待发送数据属于当前节点,否则来源于其他节点(节点协助其他节点重发数据)。

图1 CoTDMA数据分组结构
如图2所示,源节点S发送数据到目标节点D。如果在D随后发送数据的COOP Header域中包含S的ID号(即ID-1、ID-2、…、ID-n中包含S的ID号),则表明D已成功接收S数据,否则未成功接收数据。即通过分组头中的COOP Header域,节点可以对已发送数据的接收情况进行确认。需要指出的是,即使节点在对应时隙内没有数据需要发送,也要发送 Payload Data为空的虚拟数据分组(dummy packet)[9~11]。在分布式TDMA方法中,每个节点对应一个时隙,节点在自身对应时隙内发送虚拟分组不会产生与其他节点竞争信道的问题,也不会产生任何形式的信道拥塞,但能使VANET中的节点更好地协调分配时隙[9]。
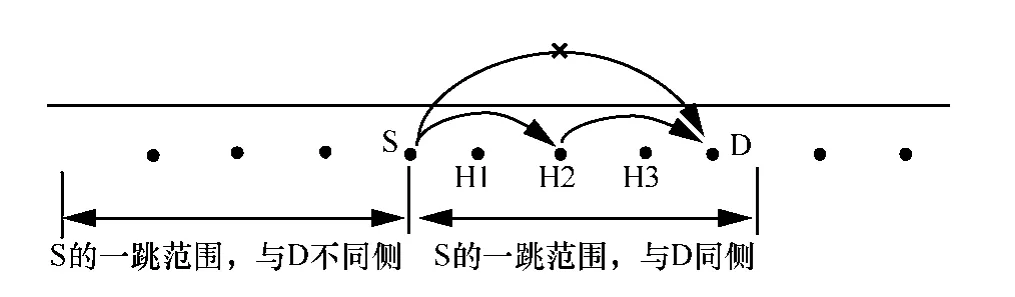
图2 S到D的数据传输失败
图3表示图2中的节点H2协助S发送数据的过程。图3(a)表明,节点H1、H2、H3在S的一跳传输范围内,当S发送数据到D时,如果它们接收到S数据,将数据保存在自身的缓存中(H1、H2、H3可通过分组头中的 MAC Header域获知数据发往的目标节点);图3(b)表明,在H2时隙到来前,如果H2接收到D的数据,但在其COOP Header域中没有发现S的ID号,则H2判断出D没有成功接收到S数据;图3(c)表明,在H2时隙到来前,H2没有侦听到其他节点协助发送S数据,且在自身对应时隙内没有数据需要发送,则H2在其时隙内协助S重发数据。H2发送完S数据后,附近其他节点侦听到H2已协助重发S数据,这些节点不再协助重发S数据。
源节点S发往目标节点D的数据传输失败时,S的当前帧中能够协助S重发数据的节点称为S的协助节点。综上,在S发送数据失败时,如果满足下面条件,则节点H2能成为S的协助节点。
1) H2成功接收到S数据。
2) H2在当前帧中的对应时隙在D后面(D在其时隙内发送数据后,H2才能通过其分组头中的COOP Header域判断D是否成功接收S数据)。
3) H2在其对应时隙内没有数据需要发送。
4) H2在S的一跳传输范围内且与目标节点D在S的同侧(如图2所示)。
S的一跳范围内且与目标节点D异侧的节点到D的范围包含了S到D的范围,且数据传输方向相同,所以这些节点到D与S到D有着相似的信道特性和条件(S到D的数据传输已失败),且间距更大,因此,这些节点能够成功协助S重发数据的概率小。选与D同侧的节点为协助节点不但避免了上述情况,而且这些节点到 D的平均间距较小。H2通过GPS系统获知自身的位置信息,从S、D的数据分组头中获知 S、D的位置信息(分组头中的Position域保存了节点位置信息),基于这些节点的位置信息,H2判断自身是否位于S的一跳范围内且与D同侧。
S可能有多个协助节点,在第一个协助节点协助S重发数据后,其他协助节点侦听到第一个协助节点重发的S数据,这些节点不再协助重发S数据。
CoTDMA仅利用协助节点的空闲时隙重新发送传输失败的数据,开销小,没有影响到网络中的正常数据传输。

图3 H2协助S发送传输失败的数据
2.3 COOP Header域开销
COOP Header域包含了节点当前位置、待发送数据的最初源节点 ID号以及在上一帧中已成功接收数据的源节点 ID号。下面通过 NS2仿真分析COOP Header域开销(仿真参数的设置见第4节),图4给出仿真结果。
图4(a)表明,在一跳传输范围固定时(200 m),随着公路车辆密度的增加,COOP Header域开销占用的最大时隙时间比例不超过 3%。图 4(b)表明,在公路车辆密度固定时(0.03车/米),随着一跳传输范围的增加,COOP Header域开销占用的最大时隙时间比例不超过5%。通常情况下,COOP Header域开销占用的时隙时间比例小于3%,没有影响到网络中正常数据传输,因此,本文不考虑 COOP Header域开销的影响。
需要指出的是,根据交通流相关理论,车辆密度越大,车辆速度越小[17]。在车辆密度非常大的情形下,车辆速度非常小,车辆之间形成的网络可当成静态网络来处理[18]。
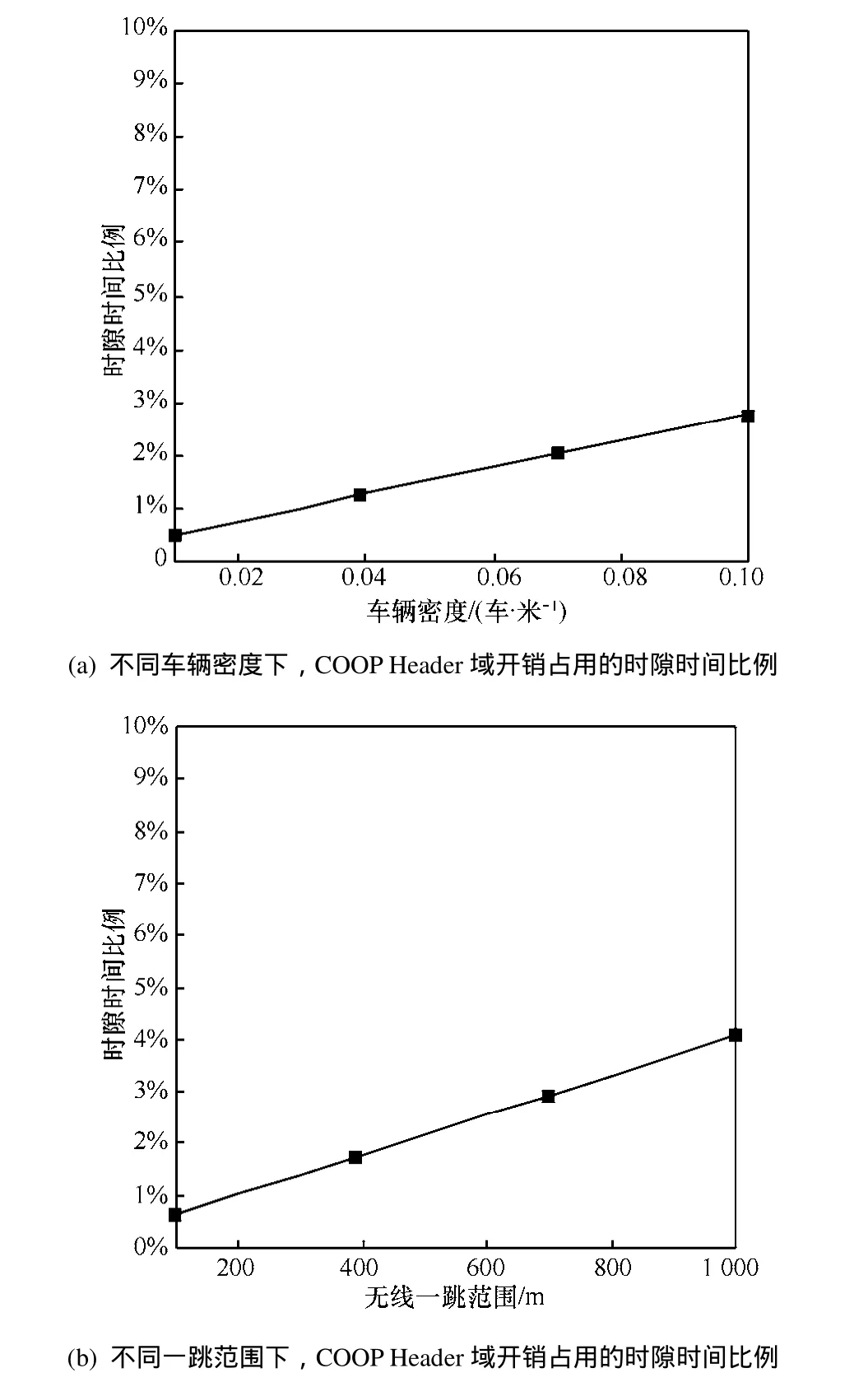
图4 COOP Header域开销占用的时隙时间比例
3 吞吐量分析
无线一跳传输范围远大于公路宽度,VANET可当成线状网络[1,6,15]。本文基于VANET的线状结构分析VeMAC和 CoTDMA的性能。下面以图2中的场景来分析2种方法的帧中数据发送成功概率和网络吞吐量,其中,网络吞吐量定义为帧中能够成功发送数据的时隙数与每帧时隙数的比值[16]。
车辆在公路上服从泊松分布[6,15]。设车辆平均密度为β(每米车辆数),则长度是l的公路上有i辆车的概率为

无线一跳传输范围为R,节点前后一跳传输范围内的邻居节点数Nn等于j的概率为(Nn包括节点自身)

设每帧包含的时隙数为F。当Nn≤F时,节点在帧中都能对应一个时隙,当Nn>F时,最多有F个节点在帧中有对应时隙。为了获得稳定的MAC层性能,F需要满足下面条件[16]

3.1 VeMAC吞吐量
设pd为节点在其对应时隙内需要发送数据的概率,Fd为帧中需要发送数据的时隙数。当Nn=j时,Fd均值为

其中,pc为信息碰撞概率。由2.1节知,pc为0,所以ps=p。
综上,VeMAC在帧中能够成功发送数据的时隙数Fs均值为

VeMAC的网络吞吐量为

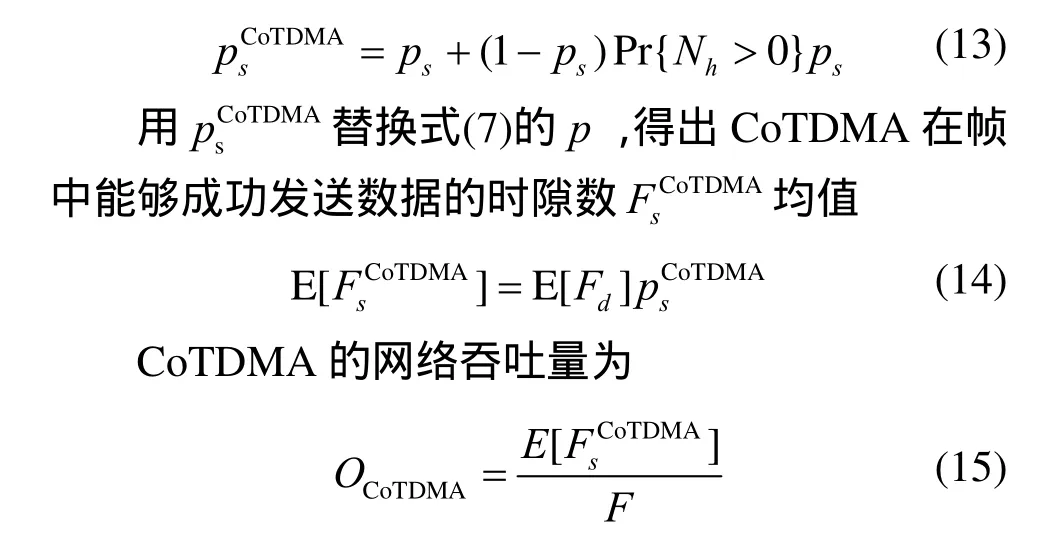
3.2 CoTDMA吞吐量
当S到D的数据传输失败时,在S一跳传输范围内且与D同侧的其他节点将协助S重发数据,设期间的节点数为NR,则


S发送数据失败时,当前帧可能存在S的协助节点来重新发送S数据。所以,CoTDMA的帧中数据发送成功概率为(S所有协助节点都在S一跳传输范围内且与目标节点D同侧,假设所有其他协助节点都能侦听到第一个协助节点重发的S数据,这些节点不再协助重发S数据)
4 网络仿真
用NS2仿真一段公路车辆行驶场景。公路有2条车道,分别对应了公路不同方向。车道上车辆服从泊松分布,设每车道的车辆密度为βl,则公路车辆密度β=2βl。无线信道采用车辆专用短程通信标准(DSRC, dedicated short range communication)参数,其中,工作频段为DSRC 5.9 GHz,数据传输速率为24 Mbit/s[9]。帧中的时隙数F为80,时隙时间长度为1 ms。VeMAC把时隙分为3个不同的子集,分别对应了公路不同方向车辆和公路旁固定通信设备。本文不考虑公路旁固定通信设备,每车道对应的时隙数为40。
4.1 网络吞吐量仿真分析
下面在不同的参数下比较VeMAC和CoTDMA的数据发送成功概率和网络吞吐量。仿真结果取50次均值,每次抽取105帧的仿真数据进行统计,图5到图7给出仿真结果。VeMAC的数据发送成功概率决定于信道质量(p),CoTDMA的数据发送成功概率除决定于信道质量外,还受到车辆密度(β)、数据发送概率(pd)和一跳传输范围(R)的影响。图5到图7表明,相对于VeMAC,CoTDMA能显著提高数据发送成功概率和网络吞吐量。节点在当前对应时隙内发送数据失败时,VeMAC必须等待节点下一帧的对应时隙才能重发数据,而 CoTDMA能利用当前帧中其他节点的空闲时隙重发数据,提高了帧中的数据发送成功概率,从而提高了网络吞吐量。
在数据发送概率(0.8)和一跳传输范围(400 m)固定时,图5(a)表明,车辆密度越大,一跳传输范围内的节点越多,能够协助发送数据的节点就越多,CoTDMA的数据发送成功概率就越大;图5(b)表明,车辆密度越大,一跳传输范围内的节点越多,2种方法的吞吐量就越大。
在车辆密度(0.04车/米)和一跳传输范围(400 m)固定时,图6(a)表明,数据发送概率越大,帧中拥有空闲时隙的节点就越少,能够协助发送数据的节点就越少,CoTDMA的数据发送成功概率就越小;图 6(b)表明,数据发送概率越大,帧中需要发送数据的时隙就越多,2种方法的吞吐量就越大。
在车辆密度(0.04车/米)和数据发送概率(0.8)固定时,图7(a)表明,一跳传输范围越大,一跳传输范围内的节点就越多,能够协助发送数据的节点就越多,CoTDMA的数据发送成功概率就越大;图7(b)表明,一跳传输范围越大,一跳传输范围内的节点就越多,2种方法的吞吐量就越大。
图5到图7表明,2种方法的数据发送成功概率和网络吞吐量都随着p值的增大而增大。p为0时,信道质量差,所有数据发送都会失败,2种方法的数据发送成功概率和网络吞吐量均为0;p为1时,信道质量好,所有数据发送都会成功,2种方法的数据发送成功概率为1,网络吞吐量也相同。

图5 在一跳传输范围和数据发送概率固定时,在不同的车辆密度下比较2种方法的数据发送成功概率和网络吞吐量

图6 在车辆密度和一跳传输范围固定时, 在不同的数据发送概率下比较2种方法的数据发送成功概率和网络吞吐量
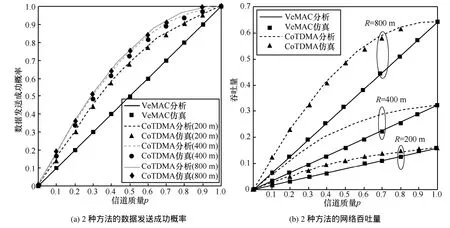
图7 在车辆密度和数据发送概率固定时,在不同的一跳传输范围下比较2种方法的数据发送成功概率和网络吞吐量
4.2 车辆间实时安全信息传输仿真分析
在VANET安全业务中,协作碰撞避免(CCA,cooperative collision avoidance)是一类重要的应用[18]。当碰到紧急情形时,车辆向后方车辆发送预警信息(WM, warning messages)分组来避免车辆发生碰撞。如果车辆接收到WM分组,且WM分组来自前方车辆,则继续发送该分组,否则忽略该分组[18]。下面仿真分析IEEE802.11p和CoTDMA的WM分组传输性能。IEEE802.11p通过EDCA访问信道[6],WM分组对应较小的竞争窗口和AIFS值,相对于其他类型的数据分组,WM分组优先访问信道。在仿真中,WM 分组头中含有发起该分组的节点 ID号、分组序号、生存时间(TTL, time-to-live)和位置等信息,其中,发起WM分组的节点ID号和分组序号用来区分不同的 WM 分组,TTL用来控制WM分组的传输范围(TTL值设为10,WM分组每转发一次,TTL值减1,当TTL值为0时,节点不再转发WM分组)。最前方节点每秒产生并发送5个WM分组(大小为600 byte),第一个WM分组对应的序号为1,以后每产生一个新WM分组,对应的序号累加1。2种方法的数据中继方法如下。节点接收到 WM 分组时,如果满足下述条件:1)WM分组来自前方节点;2) WM分组的TTL值大于 0;3)未发送过同一 WM 分组,则继续发送该WM分组,否则发送其他类型的数据分组(如果存在其他类型的数据分组需要发送,大小为1 200 byte)。在下面仿真中,一跳传输范围R为400 m,无线信道质量p为0.8,车辆每秒平均发送10个其他类型的数据分组。
图8为在同一车道上相距2 km的车辆间2种方法的 WM 分组平均传输时延比较。对于IEEE802.11p,在车辆密度较小时,节点访问信道的平均时延小,WM分组的传输时延小;车辆密度增大时,同时竞争信道发送WM分组的节点增多,产生的信息碰撞和数据分组重发次数迅速增多,导致信道感知时间和WM分组的传输时延迅速增大。在车辆密度较大时,IEEE802.11p不能满足WM分组的传输要求。对于CoTDMA,在不同的车辆密度下,节点访问信道的平均时延为帧长一半,WM分组的传输时延基本保持不变,小于0.5 s,满足了WM分组的传输要求。图9为2种方法的开销比较。在车辆密度较小时,2种方法的开销相差不大,随着车辆密度增大,CoTDMA开销增大。IEEE802.11p开销主要为一些控制开销,如FCS、PLCP等,它们不随着车辆密度的增大而增大。CoTDMA除了一些控制开销外,还包括FI、COOP Header等开销,它们包含了两跳范围内节点占用的时隙信息、已成功接收数据的源节点ID号等,对应的开销随着车辆密度的增大而增大。CoTDMA以一些开销为代价使得节点以确定的方式访问信道,并可以对已发送的信息进行确认,保证了车辆间实时安全信息及时可靠地传输。
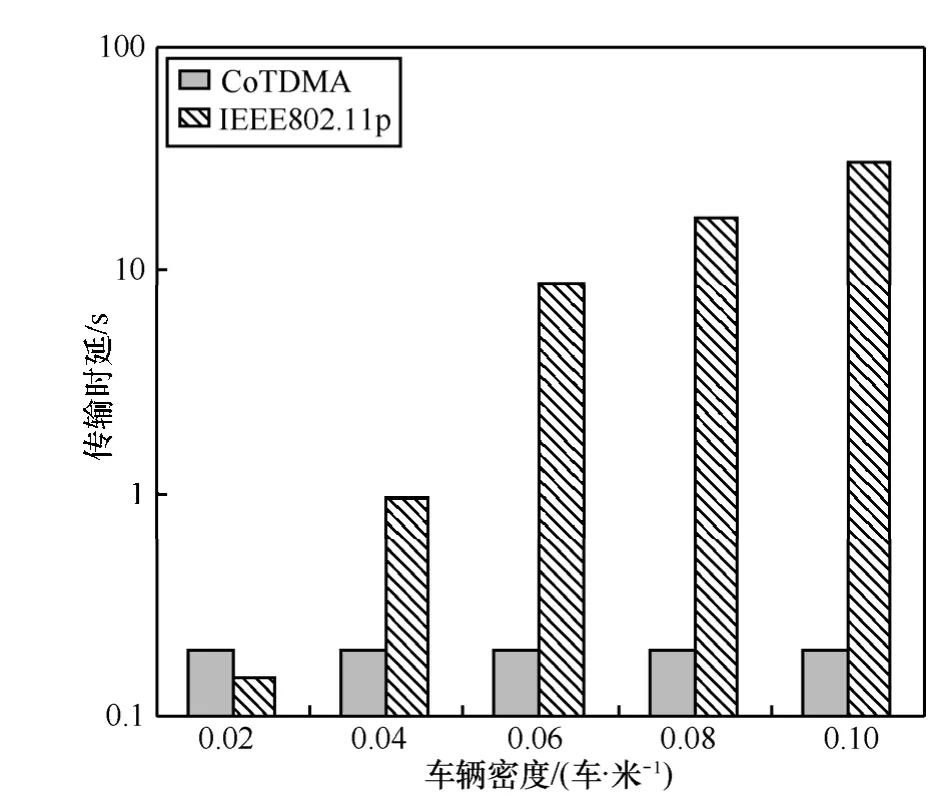
图8 IEEE802.11p与CoTDMA的WM时延大小比较

图9 IEEE802.11p与CoTDMA开销占用的时隙时间比例
在车辆密度不变时(0.06车/米),图 10为 500次仿真中IEEE802.11p和CoTDMA的WM分组时延分布比较。IEEE802.11p对应的时延分布在较广范围内(15 s),CoTDMA对应的时延分布在1 s内。由于信息碰撞、信道感知和数据分组重发等因素,IEEE802.11p的信道访问时延不确定,导致WM分组的传输时延不确定,分布在较广范围内。CoTDMA的信道访问时延确定,所以WM分组的传输时延变化小,分布在较小的范围内。图 11为上述条件下不同位置车辆第一次接收的 WM 分组平均序号。对于 IEEE802.11p,信道访问时延不确定,WM分组发送时间不确定,所以节点第一次接收的WM分组序号不确定。如距发起WM分组车辆800 m的车辆第一次接收的WM分组平均序号为1.6,该位置车辆第一次接收的WM分组序号有时为1,有时为2等。此外,由于大量的信息碰撞,序号为1的WM分组在距发起WM分组车辆平均900 m的位置丢失,序号为2的WM分组在平均1 300 m的位置丢失。对于CoTDMA,节点以确定的方式访问信道,消除了信息碰撞等因素,所有车辆都能接收到序号为1的WM分组,且第一次接收的WM分组也是该分组。稳定的信息传输过程不但对于VANET安全业务信息至关重要,而且也能改善声音、视频等其他多媒体信息的传输性能。

图10 IEEE802.11p与CoTDMA的WM时延分布比较

图11 距发起WM分组车辆不同距离车辆第一次接收的WM分组序号
5 结束语
为避免VANET节点访问信道的不确定性,文献[8~11]基于TDMA方法提出了分布式TDMA方法,但该方法没有利用被节点占用的空闲时隙,未能充分利用无线信道资源,且不能避免由于信道条件差所导致的分组丢失和网络吞吐量下降问题。为此,本文在分布式 TDMA方法的分组头中增加COOP Header域来确认数据发送情况,在确认数据发送失败时,利用附近其他节点的空闲时隙协助发送传输失败的数据。理论分析和仿真结果表明,由于利用了被节点占用的空闲时隙重新发送传输失败的数据,文中方法显著地提高了数据发送成功概率和网络吞吐量。
仿真表明,虽然IEEE802.11p使车辆间实时安全信息能优先访问信道,但多节点同时发送该类信息时,由于竞争信道带来的不确定性,且平均时延较长,IEEE802.11p不能满足该类信息的传输要求。文中方法以确定的方式访问信道,保证了车辆间实时安全信息及时稳定地传输。
根据式(3),为使MAC层性能稳定,分布式TDMA方法的帧中时隙数通常大于两跳范围内节点数目,这种情况下,帧中通常会多出没有被节点占用的空闲时隙。本文已利用被节点占用的空闲时隙协助发送传输失败的数据,如何进一步利用没有被节点占用的空闲时隙为下一步研究方向。
[1] HARTENSTEIN H, LABERTEAUX K P. A tutorial survey on vehicular ad hoc networks[J]. IEEE Communications Magazine, 2008,46(6):164-171.
[2] SOK I S. Modeling emergency messaging for car accident over dichotomized headway model in vehicular ad-hoc networks[J].IEEE Transactions on Communications,2013, 61(2):802-812.
[3] KARTIK P, DIPAK G L, MICHAEL H Z,et al. Adaptive traffic signal control with vehicular ad hoc networks[J]. IEEE Transactions on Vehicular Technology, 2013, 62(4):1459-1471.
[4] BEHNAM H, SHAHROKH V. Reliable periodic safety message broadcasting in VANETs using network coding[J]. IEEE Transactions on Wireless Communications, 2014,13(3):1284-1297.
[5] JIANG D, DELGROSSI L. IEEE 802.11p:towards an international standard for wireless access in vehicular environments[A]. Vehicular Technology Conference[C]. Calgary, 2008. 2036-2040.
[6] MA X M, ZHANG J S, YIN X Y,et al. Design and analysis of a robust broadcast scheme for VANET safety-related services[J]. IEEE Transactions on Vehicular Technology, 2012, 61(1):46-61.
[7] WISITPONGPHAN N, TONGUZ O K, Parikh J S,et al. Broadcast storm mitigation techniques in vehicular ad hoc networks[J]. IEEE Wireless Communications, 2007, 11:84-94.
[8] BORGONOVO F, CAPONE A, CESANA M,et al. Ad Hoc MAC:new MAC architecture for ad hoc networks providing efficient and reliable point-to-point and broadcast services[J]. Wireless Networks,2004, 10:359-366.
[9] YU F, SUBIR B. Self-configuring TDMA protocols for enhancing vehicle safety with DSRC based vehicle-to-vehicle communications[J].IEEE Journal on Selected Areas in Communications, 2007, 25(8):1526-1537.
[10] OMAR H, ZHUANG W, LI L. VeMAC: a novel multichannel MAC protocol for vehicular ad hoc networks[A]. IEEE INFOCOM[C].Shanghai,China, 2011.413-418.
[11] OMAR H, ZHUANG W, LI L. VeMAC: a TDMA-based MAC protocol for reliable broadcast in VANETs[J]. IEEE Transactions on Mobile Computing, 2013, 12(9):1724-1736.
[12] BOBAN M, VINHOZA T, FERREIRA M,et al. Impact of vehicles as obstacles in vehicular ad hoc networks[J]. IEEE Journal on Selected Areas in Communications, 2011, 29(1):15-28.
[13] BRANTE G, SOUZA R D, GARCIA J. Spatial diversity using analog joint source channel coding in wireless channels[J]. IEEE Transactions on Communications, 2013, 61(1):301-311.
[14] ZHANG Z J, MAO G Q, ANDERSONS B D. Stochastic characterization of information propagation process in vehicular ad hoc networks[J]. IEEE Transactions on Vehicular Technology, 2014, 15(1):122-135.
[15] ZHANG W X, CHEN Y, YANG Y,et al.Multi-hop connectivity probability in infrastructure-based vehicular networks[J]. IEEE Journal on Selected Areas in Communications, 2012, 30(4):740-747.
[16] SAILESH B, THANAYANKIZIL L V, BAI F, ZHUANG W. Effects of time slot reservation in cooperative Ad Hoc MAC for vehicular networks[A]. IEEE ICC[C]. Budapest, 2013. 6371-6375.
[17] ARTIMY M. Local density estimation and dynamic transmission-range assignment in vehicular ad hoc networks[J]. IEEE Transactions on Vehicular Technology, 2007, 8(3):400-412.
[18] TALEB T, BENSLIMANE A, LETAIEF K B. Toward an effective risk-conscious and collaborative vehicular collision avoidance systems[J]. IEEE Transactions on Vehicular Technology, 2010, 59(3):1474 -1486.