基于MATLAB的制动防抱死系统的建模与仿真
2015-01-03任肖齐超飞
任肖,齐超飞
(长安大学 汽车学院,陕西 西安 710064)
基于MATLAB的制动防抱死系统的建模与仿真
任肖,齐超飞
(长安大学 汽车学院,陕西 西安 710064)
通过在MATLAB上建立整车模型来模拟制动防抱死的控制过程。利用逻辑门限控制方法,实现液压系统对制动力的控制。并按照80km/h,60km/h,30km/h三种车速和三种不同制动强度z=0.7,z=0.5,z=0.1下的,仿真分析了制动强度,前后轮轮速和车速的变化,滑移率的变化等制动性指标。
制动防抱死系统;逻辑门限控制;MATLAB;仿真
CLC NO.: U463.5 Document Code: A Article ID: 1671-7988(2015)04-94-03
引言
从近代典型的汽车事故数据分析,在紧急状况发生时,如果汽车高速行驶到静止过程中处于失控状态,会造成更加严重的后果,而产生这一状况的主要原因是人们在高度紧张状态下过度的使用制动系统,传统的制动系统会使车轮抱死、车身发生漂移失控。因此,汽车制动系统成为保证其安全性能的关键因素,防止汽车在过度制动时车轮抱死失控也成为研究制动系统的关键性问题。本文基于MATLAB设计了一种制动防抱死系统的仿真模型。
1、制动防抱死系统的基本原理
汽车在制动时,车身速度由于轮胎与路面之间的摩擦力(制动力)缘故进行减速,与此同时,车轮速度减少的更多。于是就会产生车身速度与车轮速度之差,称之为滑移现象,表征滑移量的参数定义为滑移率:
2、系统模型
2.1 制动踏板模型
制动踏板可以简化为一个杠杆机构,制动踏板上的作用力按照一定的比例放大后作用在助力器的推杆上,即:
在制动踏板踩下的初始阶段,制动系统机械结构和制动器的间隙被消除,制动器没有产生制动强度。随着踏板力的增加,在车轮抱死前制动力与踏板力呈线性增长,制动强度也随着制动力的增加而逐渐变大,受附着力的限制,制动力达到附着力后不再变化。因此,可将目标制动强度与制动踏板力视为分段函数的关系,建立峰值附着系数为0.87的路面上的目标制动强度判断模型。
2.2 真空助力器模型
真空助力器的功用是利用真空泵产生的负压力与大气压力的差值,将制动踏板输出力放大,使得踩制动踏板力减小,达到制动轻便的目的。本文根据试验测定出真空助力器的数学模型:
式中,Fin真空助力器的输入力(N);Fout真空助力器的输出力(N);真空助力器输入输出特性曲线拟合后得到的系数。
2.3 液压控制系统模型
液压控制系统结构原理如图1所示。液压控制系统包括高压蓄能器、低压蓄能器、液压油泵、常开阀、常闭阀、单向阀、液压管路等。
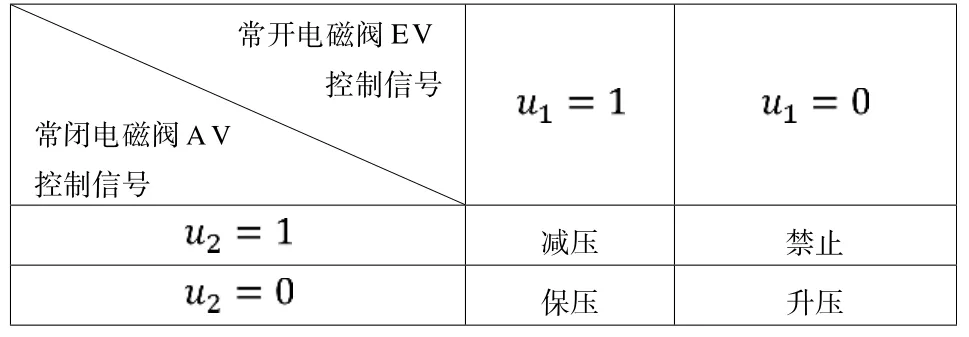
表1 电磁阀信号组合与液压控制系统工作状态关系
图1中,D为高压蓄能器,用于存储制动液,吸收电磁阀开闭时造成的压力脉动;SPK为低压蓄能器,用于维持液压系统保持低压状态;RPF为液压油泵,其作用是把低压蓄能SPK中的制动液泵回高压蓄能器D中,用于补偿降压过程中流出的制动液,保持油路的连续性;AV为电磁控制常闭阀;EV为电磁控制常开阀。液压系统工作时,通过控制电磁阀AV和EV的通断来实现制动轮缸的升压、降压和保压状态。如表1所示。
2.4 滑移率模型
在建立ABS控制器模型时,基于逻辑门限值的控制方法,对车速和滑移率实时检测,制定制动液压的控制策略。建立如表2所示为ABS液压制动状态转移逻辑规则:液压控制系统根据理想滑移率和实际滑移率的关系在保压、增压和减压之间转换;状态间的转换改变制动压力调节器的参数;一般情况下,车速小于4m/s时,ABS系统退出工作,制动器制动力增加,此时车轮将逐渐抱死。

表2 ABS液压制动状态的逻辑控制规则
2.5 车辆纵向动力学模型
根据经典汽车理论,我们可以计算出汽车在高速制动时汽车的微分方程:
车辆制动减速度为:
3、车辆仿真模型设计
车辆仿真模型主要功能是在制动踏板输出力作用下产生制动力矩,与电机制动力矩一起参与车辆制动,输出车速。如图2所示为本文建立的车辆仿真模型,主要包括助力器模型、主缸模型、轮缸模型、制动力矩计算模块、滑移率计算模块、实际液压制动力计算模型、车辆制动动力学模型和ABS系统压力调节模型。
4、仿真结果
该仿真条件为载重为4920Kg的大客车, 并在高附着系数路面,峰值附着系数期望滑移率分别在车辆速度在80Km/h,60Km/h和30Km/h三种工况下和三种不同目标制动强度下进行了仿真。其中图3到图5分别显示了在目标制动强度为0.7,车速为80Km/h的情况下车辆的制动强度、滑移率及前后车轮轮速与车速之间的变化关系。
从以上各图可以看出,仿真结果达到了目标制动强度,其前后车轮轮速与车速基本达到了同步,未出现车轮抱死现象,图5显示了前后车轮的滑移率能够维持在期望滑移率的范围内。
5、结语
通过MATLAB对大客车的制动防抱死系统进行建模分析,可以有效的模拟真实车辆的制动过程,比较真实地反映了ABS系统实际工作情况。仿真分析表明,本文利用逻辑门限控制的方法,选取了合理的控制参数,建立的ABS系统模型能够满足大客车的制动要求。从整体来看,仿真结构具有实用性价值,为进一步研究汽车动力学性能特供了有效的手段。
[1]樊继东.基于 MATLAB的ABS控制仿真研究[J].湖北汽车工业学院,2010.
[2]叶磊,尹作发.基于 MATLAB/SIMULINK 的车辆制动过程分析[J].公路与汽运,2006.
[3]潘开广.基于 MATLAB 的汽车防抱死制动系统仿真研究[J].农业装备与车辆工程,2008.
[4]于东.汽车防抱死制动系统(ABS)控制方法仿真研究与控制器设计[D].山东大学,2007.
[5]吴兴敏.汽车防抱死制动系统控制算法及仿真研究[D],长安大学,2007.6.
[6]余志生,夏群生.汽车理论(第五版)[M]北京.机械工业出版社.2009.
Modeling and Simulation of Antilock Braking System based on MATLAB
Ren Xiao, Qi Chaofei
(School of Automobile, Chang'an University, Shaanxi Xi'an 710064)
Through the establishment of the vehicle model on MATLAB, Which simulate the process of antilock braking system. The logic threshold control method can realize the control of braking force by the hydraulic system. And in accordance with 80km/h, 60km/h, 30km/h three kinds of speeds and three different brake strength z=0.7, z=0.5, z=0.1 under the simulation analysis of the braking distance, the front and rear wheel speed and vehicle speed changes, and changes in the braking slip ratio index.
antilock braking system;the logic threshold control;MATLAB;the simulation
U463.5
A
1671-7988(2015)04-94-03
任肖,工学硕士,就读于长安大学汽车学院,研究方向汽车动力学仿真,驾驶员模型。
