一种高端重卡网络架构
2015-01-03成金峰蔺春明李攀林国干张少宇
成金峰,蔺春明,李攀,林国干,张少宇
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
一种高端重卡网络架构
成金峰,蔺春明,李攀,林国干,张少宇
(安徽江淮汽车股份有限公司,安徽 合肥 230601)
CAN总线是车载网络系统中的重要组成部分,目前已在汽车动力系统和车身系统中得到广泛应用。随着汽车电子化技术的不断深入发展,汽车上电子控制单元(ECU)的数量已经越来越多,而一些高端汽车电子控制单元数量已达到几十个,传统的集中式网络架构由于负载率等问题已难以满足需求。本文提出的分布式网络架构可以弥补传统网络架构在负载率、安全性上的不足。
CAN总线;网络架构;负载率;分布式
CLC NO.: U463.6 Document Code: A Article ID: 1671-7988(2015)04-07-04
前言
随着汽车电子技术的发展,汽车上的电控单元(ECU)也越来越多,采用能够满足多路复用的总线通信系统,可以将各个ECU连接成为一个网络,以共享的方式传送数据和信息,实现网络化的数字通信与控制功能。CAN总线是车载网络系统中的重要组成部分,目前已在汽车动力系统和车身系统中得到广发应用。
该网络架构一旦增加配置,节点数量会较多,信息交互量会很大,因此实际负载也很高,这就导致了数据发送的实时性急剧下降,信息开始在总线上延迟,许多数据由于优先级的问题无法在总线上发送,集中式总线网络已无法胜任需求。
1、分布式网络架构
本文提出的方案主要解决现有网络架构兼容性差、负载率过高的问题。在集中式网络架构的基础上,提出了分布式总线网络的概念,它在继续遵循CAN协议的基础上,将原有的总线网络分成了动力域、底盘与安全域、车身域和信息管理域四个部分,每一个域都有一个主控单元,主控单元将每个域分成若干个子网段,每个子网段将信息交互量最大的几个节点划分在一起,由主控单元负责协调域内的工作,当某个子网段出现故障时,不会影响域内其它网段的正常工作,大大提升了架构的稳定性及安全性。四个域间通过骨干网连接,实现域间交互信息的共享。分布式网络架构通过网络分割有效地降低了网络负载率,当单个域的网络中断时,其它域还能正常工作。
下面结合网络架构的框图,对实施案例进行说明。参见图2。
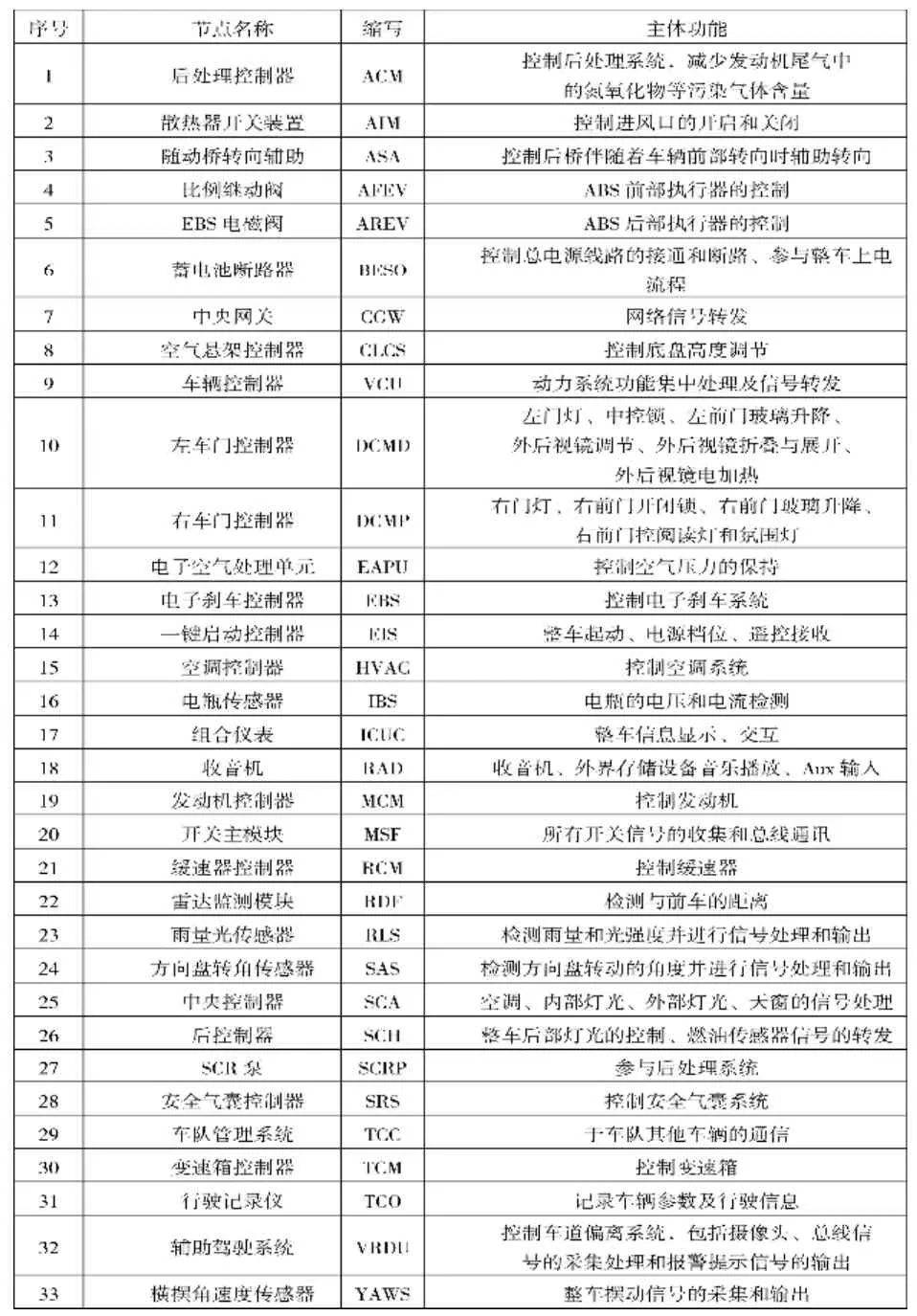
表1 各ECU功能
1.1 车身域
车身域的主要功能是实现整车大部分的电气功能。作为主控单元的SCA,既要负责协调域内电气功能的正常运行,还得负责与其它域的信息交互。SCA集成了继电器和保险丝,控制车身前部和驾驶室内部的灯光、雨刮、电磁阀和传感器等;SCA的前后侧直接连接驾驶室内外部线束,节省了很多接插件。各个开关组都是一个独立的小控制器,通过总线,连接到了开关主模块(MSF)上。通过总线开关组有效地解决了开关的可扩展性,随意增加开关成为可能。主干网上共9个CAN节点,包括:中央控制器SCA、左车门控制器DCMD、右车门控制器DCMP、一键启动控制器EIS、空调控制器HVAC、开关主模块MSF、车队管理系统TCC、收音机RAD、安全气囊控制器SRS,通过SCA上集成的网关功能实现与其它模块的信息交互。
例如:当左转向开关打开时,MSF采集该信号后发至Cabin CAN,SCA负责控制左前转向灯并将开关信号发送至CGW,CGW再将信号转发至Exterior CAN,SCH接收到该信号后控制左后转向灯。
图3为中央控制器SCA的系统框图:
中央控制器SCA电路板具有电源模块、开关采集模块、高边驱动模块、CAN模块、LIN模块等,实现组合灯(近光灯、远光灯等)、柜灯、标识灯等灯光开关的采集和相应的控制,通过CAN、LIN实现同后控制器等的通信。
图4为中央控制器SCA的软件流程:
1.2 动力域
车辆控制器VCU、发动机控制器MCM、变速箱控制器TCM、缓速器控制器RCM等构成了动力域的大体框架。动力域包含了整车核心动力部分,主要关注点集中在发动机的经济型和变速箱的传功效率上。车辆控制器(VCU)作为动力总线的主控单元,变速箱挡位选择开关(GSM)通过LIN连接到了VCU,发动机油门踏板则通过硬线连接到了VCU上,其它信息(如自适应巡航,紧急制动等)则通过CAN信息传输。VCU通过硬线和发动机总线(ECAN)收集发动机、变速箱、缓速器、制动等工作信息,并通过内部逻辑加以运算,最后输出(CAN信息或电磁阀控制),实现了对动力域的控制,TCM和RCM已接近一个执行器。VCU作为动力域的主控单元,也为将来的功能扩展(如主动制动、节油等)打下了基础。
图5为车辆控制器VCU系统框图:
车辆控制器由电源模块、MCU模块、CAN模块、LIN模块、高驱模块、低驱等模块组成,实现传感器、执行器等的控制,通过CAN和LIN总线实现同外部的通信。
1.3 底盘安全域
底盘安全域由底盘段和安全制动2大模块组成。后控制器SCH主要负责协调底盘段与骨干网的信息交互。后控制器(SCH)连接后部灯光、传感器和电磁阀,电源直接通过后部配电实现,中央网关和后部模块之间只有CAN线连接,增加了线束的可靠性。
EAPU采用独立的LIN与仪表(ICUC)相连,当总线故障时,起到冗余备份作用,直接把事关整车安全的气压数据传输到仪表上并显示出来。
SCA和后控制器SCH之间有备份总线,当其中的Cabin CAN或Exterior CAN出现故障时,冗余总线立即被激活,相关数据通过Cabin CAN或Exterior CAN继续得以传输。
EBS等安全段上的模块涉及整车安全制动,主要功能有主动/被动刹车、随动转向辅助系统等驾驶辅助系统,并且由于EBS等模块直接关乎驾驶员的生命安全,一旦出现问题,后果十分严重,因此冗余技术的应用十分关键。例如,比例继动阀AFEV、横摆角速度传感器YAWS、EBS电磁阀AREV都含备份总线,当出现故障时,自动启用备份总线,确保了整车的安全性。
图6为后控制器SCH系统框图:
SCH控制器采集开关、传感器信号及接受CAN总线信号,通过控制器内部逻辑处理、判断,实现对外部负载如车灯、执行器等进行驱动,同时集成CAN、LIN通信功能。
1.4 信息管理域
信息管理域主要功能就是实现整车信息的采集,方便用户实时观察到整车的状态。主控单元组合仪表ICUC与动力总线和制动总线直接通讯,并将所需显示的信息和报警符号显示在仪表上,并将相关故障信息转给TCO。TCO记录车辆参数及行驶信息、故障信息。驾驶辅助系统VRDU控制车道偏离系统,包括摄像头、总线信号的采集处理和报警提示信号的输出。
2、结束语
总线负载率促使我们必须对整车网络进行优化和细分,由原先的一条网络逐步发展到本发明的多域多总线的结构(动力域、底盘与安全域、车身域和信息娱乐域),在降低总线负载和清晰职能的同时,也为将来电子电气系统的发展预留了较多扩展空间,某些新增节点甚至可以直接挂到上述域中。同时大大提高了整车的安全性能,即使车身域或信息管理域出现故障,也不会影响整车的正常行驶。
VCU并不是一个孤立的网关,它作为动力系统的主控单元,通过编程完成了整个动力系统的控制,包括:整车能量扭矩的协调控制、整车网络的维护管理、换挡管理、智能驾驶、故障诊断处理、车辆状态监视和控制,使得各部件控制器成为独立的执行器,分工更为明确,执行效率更高并且减少了动力系统的变更、优化的难度及工作量,缩短了新车型开发周期,提高了整车电子电气的平台化通用化,同时也为将来动力方面的技术扩展留下了伏笔。
[1]叶强生,陈书名.CAN总线在汽车网络系统中的研究与应用[J].微计算机信息.2008.
[2]蔺春明,孙永峰,俞燚.商用车车载CAN网络系统设计思考[J].汽车实用技术.2013.
[3]罗峰,孙泽昌.汽车CAN总线系统原理、设计与应用[M].电子工业出版社.2011.
[4]邬宽明.CAN总线原理和应用系统设计[M].北京:北京航空航天大学出版社,1996.
A high-end heavy truck network architecture
Cheng Jinfeng, Lin Chunming, Li Pan, Lin Guogan, Zhang Shaoyu
(Anhui Jianghuai Automobile Co., Ltd., Anhui Hefei 230601)
CAN BUS is an important consist of vehicle network. It has been applied to power system and body system of vehicle widely.With the development of vehicle electronic, the number of ECU increased rapidly, even more than 30 in some high-end vehicle. Traditional centralized network architecture could not accord with the demand owing to the limitation of Busload. Distributed architecture provided in this article can make up the vice of Busload and security.
CAN BUS; Network Architecture; Busload; Distributed
U463.6
A
1671-7988(2015)04-07-04
成金峰,就职于安徽江淮汽车股份有限公司技术中心电气部。
